Изобретение относится к электротехнике, преимущественно к промышленной электроэнергетике, и может быть использовано при испытании электрической машины для определения частотной характеристики проводимости асинхронных и синхронных машин в условиях насыщения путей магнитных потоков рассеяния обмоток статора и ротора.
Известен способ определения частотной характеристики проводимости асинхронной машины, основанный на подаче испытательного напряжения в статорный контур при неподвижном роторе, измерении тока и последующих вычислениях.
Наиболее близким к предлагаемому техническому решению является способ определения частотном характеристики проводимости асинхронной машины, в соответствии с которым три фазы переменного напряжения промышленной частоты подают одновременно в статорный контур при неподвижном роторе, регистрируют мгновенные значения токов во всех фазах до затухания переходного процесса и по полученным данным рассчитывают частотную характеристику асинхронной машины.
Недостатки прототипа связаны со сложностью реализации способа, требующего применения специального устройства для затормаживания ротора, проверки и регулировки коммутационного устройства с целью обеспечения одновременной подачи напряжения в контур обмотки статора и регистрации значительного количества параметров режима. Кроме того, имеет место погрешность, обусловленная регистрацией в качестве исходных данных только трех фазных токов при неучете изменения напряжения на шинах источника испытательного напряжения в условиях изменения величины тока при переходном процессе, а также погрешность, обусловленная искажающим влиянием (на насыщение путей магнитных потоков рассеяния) различия в знаках и величинах апериодических составляющих токов в фазных обмотках статора,
Цель изобретения - упрощение, повышение точности, а также возможность использования способа для определения ,частотных характеристик проводимости асинхронных и синхронных машин.
Поставленная цель упрощения способа определения частотной характеристики и использования его для синхронной машины достигается за счет подачи испытательного напряжения к двум фазным обмоткам статора, повышения точности - посредством подачи испытательного напряжения к двум фазным обмоткам статора при определенном угле включения.
Указанные признаки исключают необходимость выполнения подготовительной операции по затормаживанию ротора двигателя (при подаче на обмотку статора наподвижной машины трехфазного напряжения в пределах от нескольких десятков до ста процентов номинальной величины возникает вращающий момент, а при подаче однофазного напряжения пульсирующий, при котором ротор машины остается неподвижным). Последняя представляет значительную сложность для крупных машин мощностью в несколько сотен кВт, Если в процессе осуществления способа-прототипа не использовать специального устройства торможения, то процесс изменения токов во времени будет зависеть от механических характеристик: постоянной инерции ротора двигателя, механизма и момента сопротивления на валу. При этом скольжение двигателя уменьшается, ток спадает и процесс происходит при переменном уровне насыщения по путям магнитных потоков рассеяния обмоток статора и ротора. Включение напряжения в определенный момент времени исключает возникновение значительной апериодической составляющей тока в обмотке статора. При трехфазном включении машины при высоких значениях напряжения, порядка номинального, наличие апериодических составляющих в фазных токах приводит к искажению идентичности уровней насыщения путей магнитных потоков рассеяния в зубцовой зоне сердечника статора для различных фаз.
Сущность изобретения заключается в
том, что при неподвижном роторе осуществляют подачу испытательного напряжения к двум фазным обмоткам статора в момент времени, соответствующий величине углового сдвига между током и напряжением,
определяемой в установившемся режиме при пониженном напряжении, регистрируют изменение тока и напряжения и по полученным данным определяют частотную характеристику проводимости асинхронной
машины. Для определения последней в условиях насыщения путей магнитных потоков рассеяния обмоток статора и ротора в качестве испытательного напряжения может быть использовано линейное напряжение от шин источника рабочего питания. Уровень насыщения в этом случае, как показывает экспериментальное исследование, достигает практически предельного значения (несмотря на снижен11е фазного
напря;.:сения в V3/2 раз), что позволяет использовать получаемые данные для определения частотной характеристики проводимости при номинальном напряжении на выводах двигателя в области частот токз в
роторе от 1 до , Нижний предел указанного диапазона определяется током установившегося режима, а верхний начальным значением переходного тока статора. Подача напряжения осуществляется
при определенном угле включения испытательного напряжения с помощью управляющего сигнала на открытие двунаправленного тиристорного ключа в цепи питания обмоткистатора. Величина указаиного угла определяется фазовым сдвигом между током и напряжением в установившемся режиме питания обмотки статора. Уровень напряжения при этом выбирается, исходя из условия протекания в цепи обмоток статора тока в пределах 5-10% номинальной величины, что исключает насыщение путей магнитных потоков рассеяния машины.
Способ может быть также использован
для определения частотной характеристики синхронной машины при установке оси ротора d {или q) в положение, совпадающее с осью магнитного потока двух питаемых переменным током фаз обмотки статора. В
этом случае при питании двух фазных обмоток статора возникает не вращающееся, а пульсирующее поле, возбуждающее реакции только в тех контурах ротора, оси которых совпадают с осью поля. Устанавливая
ротор синхронной машины в положения, при которых оси его симметрии d и q совпадают с осью магнитного поля двух соединенных встречно фазных обмоток статора, оказывается возможным определять частотные характеристики синхронной машины. Обмотка возбуждения синхронной машины при проведении испытаний должна быть замкнута накоротко во избежание повреждения изоляции.
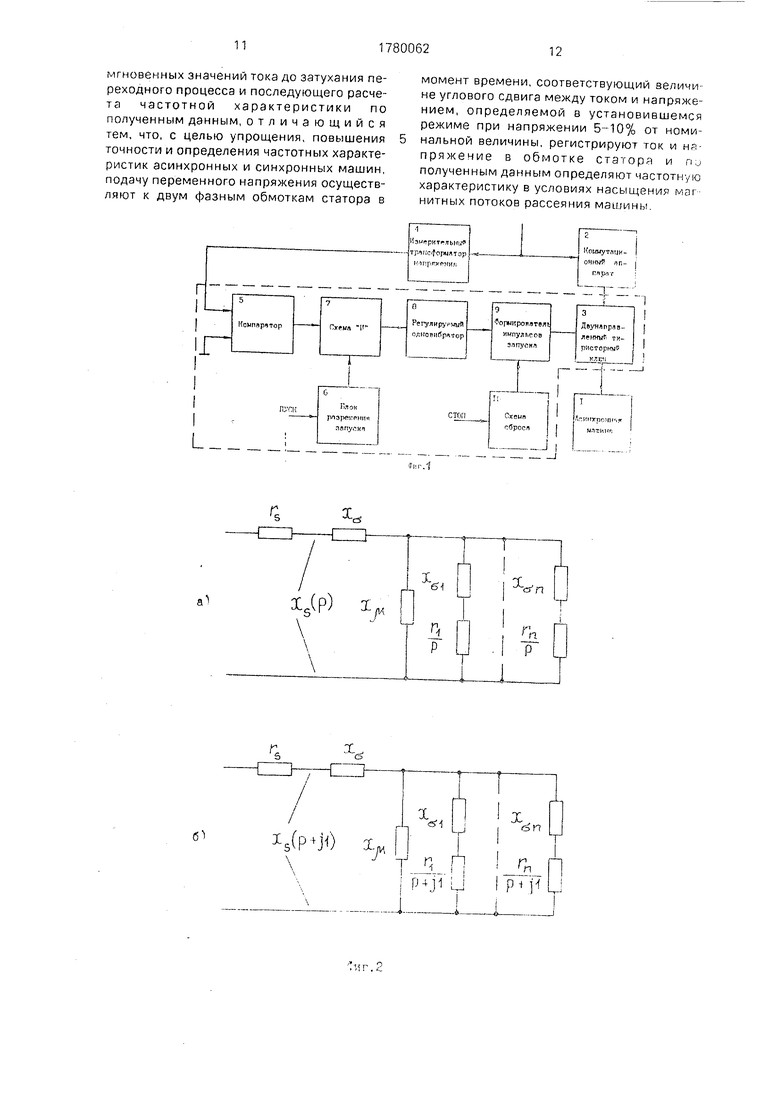
На фиг.1 приведена блок-схема цепей управления двунаправленным тиристорным ключом, обеспечивающим подачу испытательного напряжения в момент времени, определяемый заданным углом включения; на фиг.2 - операторные схемы замещения асинхронной машины в собственных осях (фиг.2а) и в синхронных осях (фиг.26).
На фиг.1 показаны также силовые элементы схемы испытаний.
Асинхронная машина 1 подключается к испытательному напряжению через коммутационный аппарат 2 и двунаправленный тиристорный ключ 3. Напряжение с «ход.-} тиристорного ключа, преобразованное измерительным трансформатором 4 напряжения, поступает на первый вход компаратора 5, второй вход которого соединен с общим проводом, при выработке блоком 6 разрешения запуска сигнала высокого уровня (пуск разрешен) в момент перехода напряжения источника через нулевое значение сигнал с выхода компаратора 5 через схему И 7 поступает на вход регулируемого одновибраторэ 8, когда на выходе блока 6 разрешения запуска сигнал имеет низкий уровень (пуск запрещен) схема 1/1 7 не пропускает выходной сигнал компаратора 5 на вход регулируемого одновибратора 8, при поступлении сигнала на вход одновибратора последний запускается, на выходе его вырабатывается импульс, длительность которого регулируется и соответствует заданному углу управления. Выходной сигнал одновибратора 8 поступает на вход формирователя 9 импульсов запуска, который начинает вырабатывать импульсы, включающие тиристорный ключ 3, возвращение устройства в исходное состояние осуществляется при помощи схемы 10 сброса, которая вырабатывает сигнал, поступающий на вход сброса формирователя 9 импульсов запуска и запрещающий выработку импульсов.
Частотная характеристика проводимости асинхронной машины, представляющая собой геометрическое место конца изображающего вектор тока статора в зависимости от скольжения ротора S (частоты тока в роторе) при питании об.мотки статора номинальным напряжением промышленной частоты, определяется по формуле
J
ysGs) isQs)
(1)
&- +JX8(Js)
где rs - активное сопротивление обмотки Сатора, отн.ед.; xsOs) - частотная характеристика сопротивления в собственных осях машины (вращающихся вместе с ротором), измеренная со стороны обмотки статора, отн.ед.
Частотная характеристика xs(js) соответствует в спектральной области входному сопротивлению операторной схемы замещения, показанной на фиг.2а при подстановке . Поскольку ротор асинхронной машины в предлагаемом техническом решении неподвижен (), то в установившемся режиме (t оэ) переходного процесса, обусловленного включением обмотки статора на напряжение источника промышленной частоты, xsQs) Xs(j1). Указанная
особенность опыта подключения двух фаз обмотки статора неподвижной машины к источнику переменного напряжения не отражается операторной схемой замещения фиг.2а пои переходе к временной области
путем подстановки , что соответствует в теории операционного исчисления t , Физические проявления рассматриваемого переходного процесса правильно описываются операторной схемой замещения в синхронных осях (фиг.2б) и соответствующим ей входным сопротивлением Xs(p-Hjs).
В случае одного контура на роторе асинхронной машины (1)
, . . . р + SS +a XS(P-I-IS) xs -----,
(2)
р +JS +«1
где S- скольжение ротора, отн.ед.: «i, al коэффициенты затухания обмотки ротора при разомкнутой и замкнутой обмотке статора соответственно, отн.ед..
«1.
п
(3)
XI
Xs - переходное индуктивное сопротивление обмотки статора, соответствующее результирующему индуктивному сопротивлению по схеме фиг.2а при р оо (),
х,+ X.J- /XI(4)
В выра.жениях (3) и (4): п - активное сопротивление обмотки ротора, отн.ед: xi полное индуктивное сопротивление обмотки ротора
(5)
+х.
где X ji - индуктивное сопротивление рассеяния обмотки ротора; х- - сопротивление взаимоиндукции, отн.ед.; х.,, - индуктивное сопротивление рассеяния обмотки статора, отн.ед; о - коэффициент рассеяния, отн.ед..
(6)
где xs - синхронное индуктивное сопротивление обмотки статора
(7)
Xs Х, + Х,
При наличии п контуров на ротсрь -, синхронных осях (1)
, . . (п) D(p -f- js) )
Xs
(n) f p +js +ак
(8) R 1 P +js +aR
где s - скольжение ротора.
Операторному выражению (8) соответствует переходная функция индуктивного сопротивления
,.
x{t)
(9)
ар
определяемая с помощью формулы разложения. При этом для получения переходной функции в собственных осях машины в выражениях комплексных корней полинома знаменателя D(p)0, входящих в показатели экспонент, следует опустить мнимые части, отражающие частоту переходных составляющих индуктивного сопротивления, затухающих с коэффициентами «R.
В соответствии с (9) при . например, име.ем
, «lai - (
-d(,t
(10)
x(t) x«-xoa e
-fj1 -I-«Г
Re
у J
р -f J1 +«1
p 0
, +J
.-Xs
a + 1
Индуктивное сопротивление Xm определяется по комплексу тока установившего ся режима.
При
(12;
где х X,, Xf /(x,,+xj-).(13)
Искомые параметры (при - гл,
при - «1. ш, а2, СГ2)ог редел; ют луту;.
минимизации среднеквадратичного отк :. нения прогнозируемой реакции - пс экс-;.
цепления обмотки статора Vpac4(t) - от
значения потокосцепления в опыте on(t}.
соответствующего регистрируемым измене
ниямтока и напряжения в диапазоне врек ни пр:..текания переходного прсцессй от :
до Tmjx
.iiax
min J Vbn(t)- T/bac4(t) dt.(4)
0.
в численной форме выражение (14) np нимает BVIA, например, при
ЗП г
min 2(Von (ti) - X Ai (tm)
I
Тm 1
aiai -- o
, --d, - tm
(15) ai «i 4-1
где I - порядковый номер момента времен .-...
для которого известны значения токов и потокосцеплений при переходном процессе: h
0 порядковый номер момента времени, для
которого t Гтах.
Временные характеристики потокосцеплений при переходном процессе V-on(t), используемые в (15), рассчитываются по 5 данным эксперимента путем решения системы дифференциальных уравнений (в системе относительных единиц) в осях, жестко связанных с ротором (собственных осях ,чй шины)
- Ud + l.d - idrs:
- Uq - V-d (r igTs.
(16)
dt
где йл- частота вращения ротора. г$ - активное сопротивление обмотки стато ра.
Поскольку ЭДС вращение в ifHD г F. системе уравиеиим (16) отсутствуют, го о .,. зывается возможным систему уравнений (16) записать в виде одного дифференциэ.чьного уравнения Ud(q)-id{q)rs В случае асинхронного двигателя индексы осей симметрии ротора d(q) опускаются. Изобретение осуществляется следующим образом. Подают пониженное напряжение на дв фазы (соединенные встречно) обмотки стлтора и определяют угол между напряжением и током в цепи, например, по осциллограмме. Задают значение измеренного угла схеме управления тиристорным ключом 3 (фиг.1). Подают испытательное напряжение в (схеме соединений обмотки статора по ri.1) на выводы коммутационного аппарата (фиг.1), включают последний и запускают схему управления тиристорным кл.--: :v, из жатием кнопки ПУСК. Регистрируют значения ТОКЕ и напряжения а опыте; i (т), U (t). например, с использованием автоматизированного комплекса средств, осуществляющего аналогоцифровое преобразование и запоминание регистрируемых величин. Определяют значения фазного тока и напряжения при условном трехфазном питании для случая включения в сеть неподвижной машины )((t) J,(% Определяют при Гтах индуктивное сопротивлениеХос Usin /21, где и, I - действующие значения испь1тательного напряжения и тока: у. - угол сдвига между током и напряжением. При , czi«r -fj Определяют с использованием функционала вида (15) значения (.. и «R, например, градиентным методом с использованием процедуры Гаусса-Ньютона. Подставляя в выражение вида (10) . определяют величину индуктивного сопротивления в начальный момент переходного процесса Xs х(0) х,- X,. + 1 По полученным данным для d. 0:1, Xs определяют параметры контуров ротора ri, X J i; величины х j-, x, при этом предполагаются известными, что характерно для всех существующих методов синтеза эквивалентных схем замещения по экспериментальным частотным характеристикам. Используя выражения (3) и (4), имеем , . ° lirV У|иГ«.,«5-Л,(1. - (.t,-«;)x; n-«,(Xff,v). Определяют частотную характеристику асинхронной машины xs(p+js) у по выражению (8) при путем подстановки у в области частот О у (или по входному сопротивлению в схеме замещения фиг.2б). Определяют частотную характеристику асинхронной машины в области скольжения ротора О S по выражению (1), в котором вместо xsQs) подставляют входное сопротивление машины, определяемое по параметрам гр , х-R в схеме замещения фиг.2а. Определение параметров роторных контуров при выполнении пункта 8, например, при осуществляют путем совместного решения системы уравнений (12), В частности, из выражений для a и cti путем исключения г1 определяют значение х, а из выражений для «2 и путем исключения Г2 определяют х,2. Далее из выражений для ai и 02 при известных значениях X ji и х,,2 определяются величины ri и Г2. Поскольку при 5кр S 00 можно принять))ldem, то полученные параметры роторных контуров схемы замещения целесообразно использовать для расчета переходных процессов асинхронного двигателя типа внезапного короткого замыкания, режима пуска, повторного пуска на выбеге с непогашенным полем, реверса. Формула изобретения Способ определения частотной характеристики проводимости асинхронной машины, содержащий операции подачи переменного напряжения в статорный контур при неподвижном роторе и регистрации
мгновенных значений тока до затухания переходного процесса и последующего расчета частотной характеристики по полученным данным, отличающийся тем, что, с целью упрощения, повышения точности и определения частотных характеристик асинхронных и синхронных машин, подачу переменного напряжения осуществляют к двум фазным обмоткам статора в
момент времени, соответствующий величине углового сдвига между током и напряжением, определяемой в установившемся режиме при напряжении 5-10% от номинальной величины, регистрируют ток и нйпряжение в обмотке статора и пи полученным данным определяют частотную характеристику в условиях насыщения маг нитных потоков рассеяния машины.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения индуктивных сопротивлений рассеяния трехфазных синхронных машин | 1988 |
|
SU1605786A1 |
| Способ определения активных и индуктивных сопротивлений рассеяния обмотки ротора асинхронного двигателя | 1986 |
|
SU1372259A1 |
| Способ определения индуктивных сопротивлений рассеяния обмоток трехфазной синхронной машины | 1990 |
|
SU1780063A1 |
| Способ определения индуктивных сопротивлений рассеяния обмоток трехфазной синхронной машины | 1985 |
|
SU1343364A1 |
| Способ измерения переходного индуктивного сопротивления синхронных машин | 1982 |
|
SU1180809A1 |
| Устройство для регулирования частоты вращения трехфазного асинхронного электродвигателя | 1988 |
|
SU1679596A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНДУКТИВНОСТИ РАССЕЯНИЯ ФАЗЫ ОБМОТКИ СТАТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2422839C1 |
| Способ определения активных и индуктивных сопротивлений рассеяния обмотки статора трехфазных синхронных машин | 1989 |
|
SU1751705A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНЫХ ПАРАМЕТРОВ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2016 |
|
RU2623834C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2502079C1 |
Изобретение относится к электротехнике и может быть использовано при испытании электрической машины для определения частотной характеристики проводимости и электромагнитных параметров схемы замещения асинхронной машины со сложной формой стержней ротора в условиях насыщения путей магнитных потоков рассеяния. Целью изобретения является упрощение, а также возможность использования способа для определения частотных характеристик пpoв(JДимocти асинхронных и синхронных машин. При неподвижном роторе подают испытательное напряжение к двум фазным обмоткам статора в момент времени, соответствующий величине углового сдвига между током и напряжением, определяемой в установившемся режиме при пониженном напряжении, регистрируют изменения мгновенных значений тока и напряжения и по полученным данным определяют частотную характеристику и электромагнитные параметры схемы замещения в условиях насыщен/1Я путей магнитных потоков рассеяния. 2 ил.слс
рлэруйтгрнил пяпуснч
;I
1,(р)
t.xeun
1Г.ЕПГХрОГП)-,« пбросп
wnxiu.i
X
X
6
-сгП
| Казовский Е.Я | |||
| Переходные процессы в электрических машинах переменно--^ гока | |||
| - М.-Л.: Изд-во АН СССР, 1962, с.29Ь.Авторское свидетельство СССР № 1004906, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
