)
(21)4334338/24-10
(22)30.11.87
(46) 30.11.89. Бюл. № 44
(71)Ленинградский завод Геометр Ленинградского производственного объединения Вибратор
(72)А.Я.Шенфельд, С.А.Элькинд и О.Н.Макаров
(53) 681.269(088.8) (56) Туричин A.M. Электрические измерения неэлектрических величин. - М-Л.: Энергия, 1966, с. 579, рис.29- 1.
Карпин Е.Б. Средства автоматизации для измерения и дозирования массы. М., Машиностроение, 1971, с,61- 63.QI
2
22
(54) СПОСОБ ОПРЕДЕЛЕНИЯ ЖЕСТКОСТИ УЗЛА ПОДВЕСКИ ВЕСОВ (57) Изобретение относится к весо измерительной технике, а именно к весам с подвеской на упругодеформи- руемых злементах типа плоских лент. Цель изобретения - повьшение точности определения жесткости подвески. Испытуемый узел подвески 1 закрепляют с одной стороны через упругие элементы 3, планки 7 и винты 8 на основании 5 с возможностью перемещения его по рабочей координате fth, жестко закрепляют на упругом элементе 4 с флажком 15, зеркалом 23 и подвижным элементом 13,, а также сочленяют и центрируют по зазорам
(Л
Фиг.1
последний с катушкой 14, являющейся неподвижным элементом электромагнитного компенсатора. Затем основание 5 с узлом подвески 1 поворачивают на 90 так, чтобы упругие элементы 3 и 4 бьши установлены на линии отвеса и перпендикулярно линии эатем подключают электромагнитный компенсатор к генератору 24 звуковых частот, изменяя частоту вводимых электрических сигналов и сохраняя 1-сх амплитуду. Увеличивая частоту этих сигналов, подбирают ее значение
таким, при котором наблюдается резонансное увеличение перемещений узла подвески 1. Затем на имитаторе 11 жестко закрепляют сменный груз 12 массой um и, подбирая частоту генератора 24, находят значение резонансной частоты вынужденных колебаний. Искомая эквивалентная жесткость С ,ц по результатам двух измерений частот f , и fг определяется из соотг- нотения f Лт/f - f| . 2 ИЛ.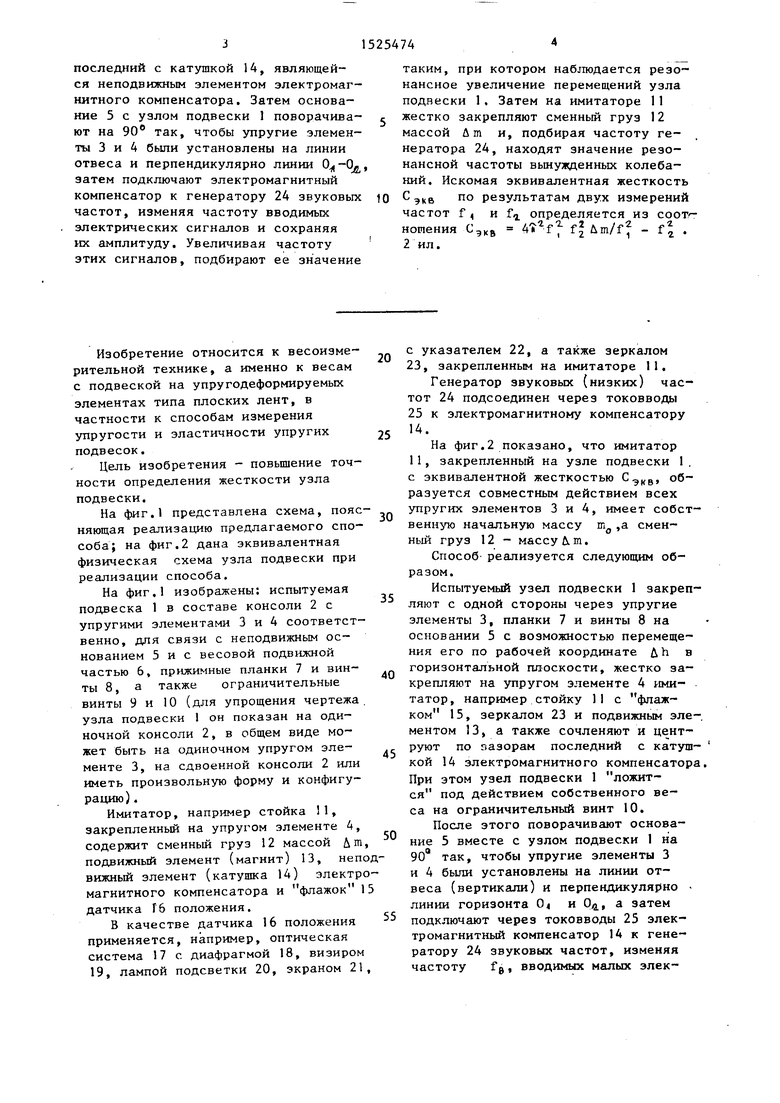
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ГЕНЕРАЦИИ ЗВУКА ДЛЯ ИСПЫТАНИЙ КОНСТРУКЦИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2707587C1 |
| Установка для демонстрации колебаний транспортного средства | 1990 |
|
SU1755315A2 |
| СТЕНД ДЛЯ УСТАЛОСТНЫХ ИСПЫТАНИЙ ЭЛЕМЕНТОВ | 1991 |
|
RU2028592C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ И РЕГУЛИРОВАНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2335354C2 |
| СПОСОБ ВОЗБУЖДЕНИЯ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2335355C2 |
| Устройство для определения качества упругой подвески весов | 1987 |
|
SU1509607A1 |
| Стенд для испытания переносных моторных пил | 1980 |
|
SU928183A2 |
| СПОСОБ ПРЕОДОЛЕНИЯ РЕЗОНАНСА В СТИРАЛЬНОЙ МАШИНЕ БАРАБАННОГО ТИПА | 2008 |
|
RU2367735C1 |
| ВИБРОВИСКОЗИМЕТРИЧЕСКИЙ ДАТЧИК | 2008 |
|
RU2419781C2 |
| РЕЗОНАНСНЫЙ СЕЙСМИЧЕСКИЙ ИСТОЧНИК ВИБРАЦИИ | 1991 |
|
RU2028647C1 |
Изобретение относится к весоизмерительной технике, а именно к весам с подвеской на упругодеформируемых элементах типа плоских лент. Цель изобретения - повышение точности определения жесткости подвески. Испытуемый узел подвески 1 закрепляют с одной стороны через упругие элементы 3, планки 7 и винты 8 на основании 5 с возможностью перемещения его по рабочей координате Δ H, жестко закрепляют на упругом элементе 4 имитатор с флажком 15, зеркалом 23 и подвижным элементом 13, а также сочленяют и центрируют по зазорам последний с катушкой 14, являющейся неподвижным элементом электромагнитного компенсатора. Затем основание 5 с узлом подвески 1 поворачивают на 90° так, чтобы упругие элементы 3 и 4 были установлены на линии отвеса и перпендикулярно линии О1-О2, затем подключают электромагнитный компенсатор к генератору 24 звуковых частот, изменяя частоту вводимых электрических сигналов и сохраняя их амплитуду. Увеличивая частоту этих сигналов, подбирают ее значение таким, при котором наблюдается резонансное увеличение перемещений узла подвески 1. Затем на имитаторе 11 жестко закрепляют сменный груз 12 массой Δ M и, подбирая частоту генератора 24, находят значение резонансной частоты вынужденных колебаний. Искомая эквивалентная жесткость Сэкв по результатам двух измерений частот F1 и F2 определяется из соотношения Сэкв = Δφ2F1 F2 ΔМ / F1 - F2. 2 ил.
Изобретение относится к весоизмерительной технике, а именно к весам с подвеской на упругодеформируемых элементах типа плоских лент, в частности к способам измерения упругости и эластичности упругих подвесок.
Цель изобретения - повышение точности определения жесткости узла подвески.
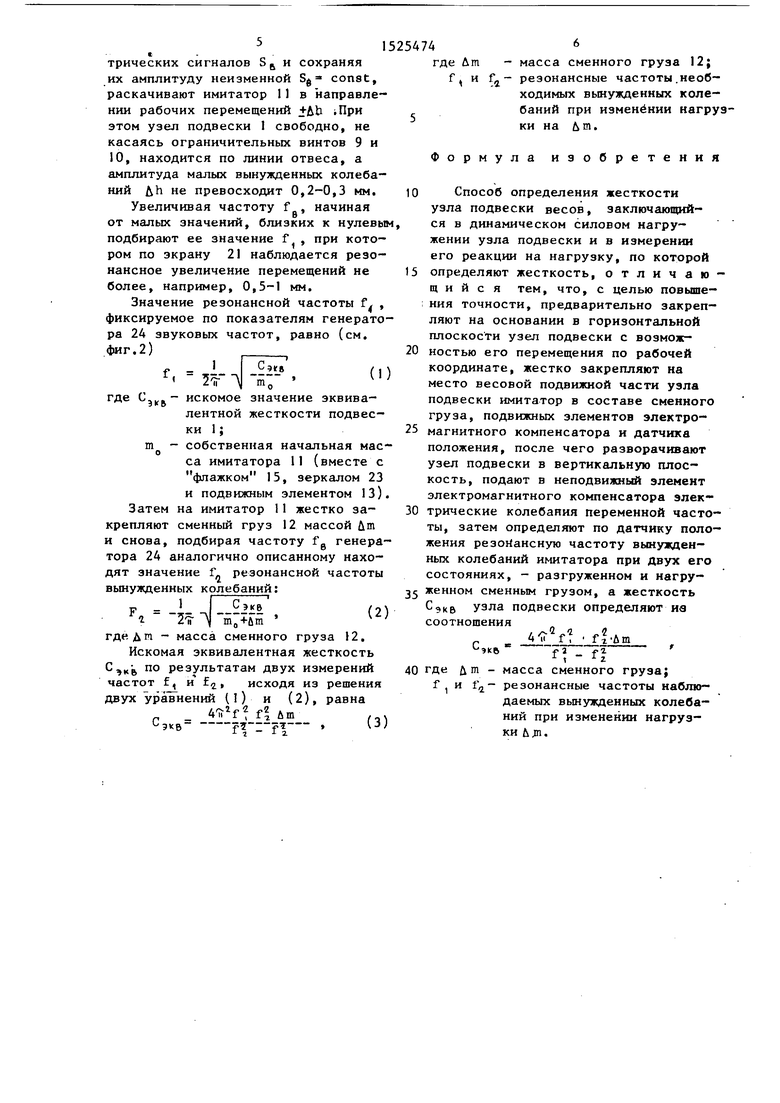
На фиг.1 представлена схема, поясняющая реализацию предлагаемого способа; на фиг.2 дана эквивалентная физическая схема узла подвески при реализации способа.
На фиг.1 изображены: испытуемая подвеска 1 в составе консоли 2 с упругими элементами 3 и 4 соответственно, для связи с неподвижным основанием 5 и с весовой подвижной частью 6, прижимные планки 7 и винты 8, а также ограничительные винты 9 и 10 (для упрощения чертежа узла подвески 1 он показан на одиночной консоли 2, в общем виде может быть на одиночном упругом элементе 3, на сдвоенной консоли 2 или иметь произвольную форму и конфигурацию) .
Имитатор, например стойка 11, закрепленный на упругом элементе 4, содержит сменный груз 12 массой &m подвижный элемент (магнит) 13, неп вижный элемент (катушка 14) электрмагнитного компенсатора и флажок датчика Г6 положения.
В качестве датчика 16 положения применяется, например, оптическая система 17 с диафрагмой 18, визиром 19, лампой подсветки 20, экраном 21
0
5
0
5
0
5
0
5
с указателем 22, а также зеркалом 23, закрепленным на имитаторе П.
Генератор звуковых (низких) частот 24 подсоединен через токовводы 23 к электромагнитному компенсатору 14.
На фиг.2 показано, что имитатор 11, закрепленный на узле подвески 1. с эквивалентной жесткостью , образуется совместным действием всех упругих элементов 3 и 4, имеет собственную начальную массу т,а сменный груз 12 - массу т.
Способ реализуется следующим образом.
Испытуемый узел подвески 1 закрепляют с одной стороны через упругие элементы 3, планки 7 и винты 8 на основании 5 с возможностью перемещения его по рабочей координате ДЬ в горизонтальной плоскости, жестко закрепляют на упругом элементе 4 ими- татор, например стойку II с флажком 15, зеркалом 23 и подвижным элементом 13, а также сочленяют и центруют по зазорам последний с катуш- кой 14 электромагнитного компенсатора. При этом узел подвески 1 ложится под действием собственного веса на ограничительный винт 10.
После этого поворачивают основание 5 вместе с узлом подвески 1 на 90 так, чтобы упругие элементы 3 и 4 бьши установлены на линии отвеса (вертикали) и перпендикулярно линии горизонта 0« и , а затем подключают через токовводы 23 электромагнитный компенсатор 14 к генератору 24 звуковых частот, изменяя частоту fв, вводимых малых электрических сигналов S и сохраняя их амплитуду неизменной 5 const, раскачивают имитатор 11 в направлении рабочих перемещений +йЬ illpH этом узел подвески 1 свободно, не касаясь ограничительных винтов 9 и 10, находится по линии отвеса, а амплитуда малых вынужденных колебаний uh не превосходит 0,2-0,3 мм.
Увеличивая частоту f , начиная от малых значений, близких к нулевы подбирают ее значение f , при котором по экрану 21 наблюдается резонансное увеличение перемещений не более, например, 0,5-1 мм.
Значение резонансной частоты f , фиксируемое по показателям генератора 24 звуковых частот, равно (см.
фиг.2)
1 I CW - 57- л -тГ где С..,- - искомое значение эквива-
г к Ь
лентной жесткости подвески 1 ;
собственная начальная масса имитатора И (вместе с
(1
m
Затем
флажком 15, зеркалом 23 и подвижным элементом 13), на имитатор 11 жестко закрепляют сменный груз 12 массой um и снова, подбирая частоту f генератора 24 аналогично описанному находят значение вынужденных колебаний;
f резонансной частоты
F I 2 г 2т N -m -t-um
(2)
где. дп - масса сменного груза 12.
Искомая эквивалентная жесткость C,-g по результатам двух измерений частот f, и двух уравнений (1)
f, и f, исходя из решения
и
f f2 Am
из
(2),
равна
ЭКВ
ТГ
fY
(3
ю
где Дт
faмасса сменного груза 12; резонансные частоты.необходимых вьмуткденных колебаний при изменении нагрузки на urn.
Формула изобретения
Способ определения жесткости узла подвески весов, заключающийся в динамическом силовом нагру- жении узла подвески и в измерении его реакции на нагрузку, по которой определяют жесткость, отличающийся тем, что, с целью повыше
20
25
30
ляют на основании в горизонтальной плоскости узел подвески с возможностью его перемещения по рабочей координате, жестко закрепляют на место весовой подвижной части узла подвески имитатор в составе сменного груза, подвижных злементов электромагнитного компенсатора и датчика положения, после чего разворачивают узел подвески в вертикальную штос- кость, подают в неподвижный элемент электромагнитного компенсатора электрические колебания переменной частоты, затем определяют по датчику положения резонансную частоту вьмуяден- ных колебаний имитатора при двух его состояниях, - разгруженном и нагру- 25 женном сменным грузом, а жесткость
)
igKB узла подвески определяют на
inmpHUd
Ч
соотношения С
f
f i
fl Am
эквfJ
40 где urn - масса сменного груза;
и
f резонансные частоты наблюдаемых вынужденных колебаний при изменении нагрузки Л л.
Фиг. г
