Изобретение относится к шахтному подъему и может найти применение в аналогичном транспортном оборудовании
Цель изобретения - повьшение достоверности контроля состояния направляющих проводников.
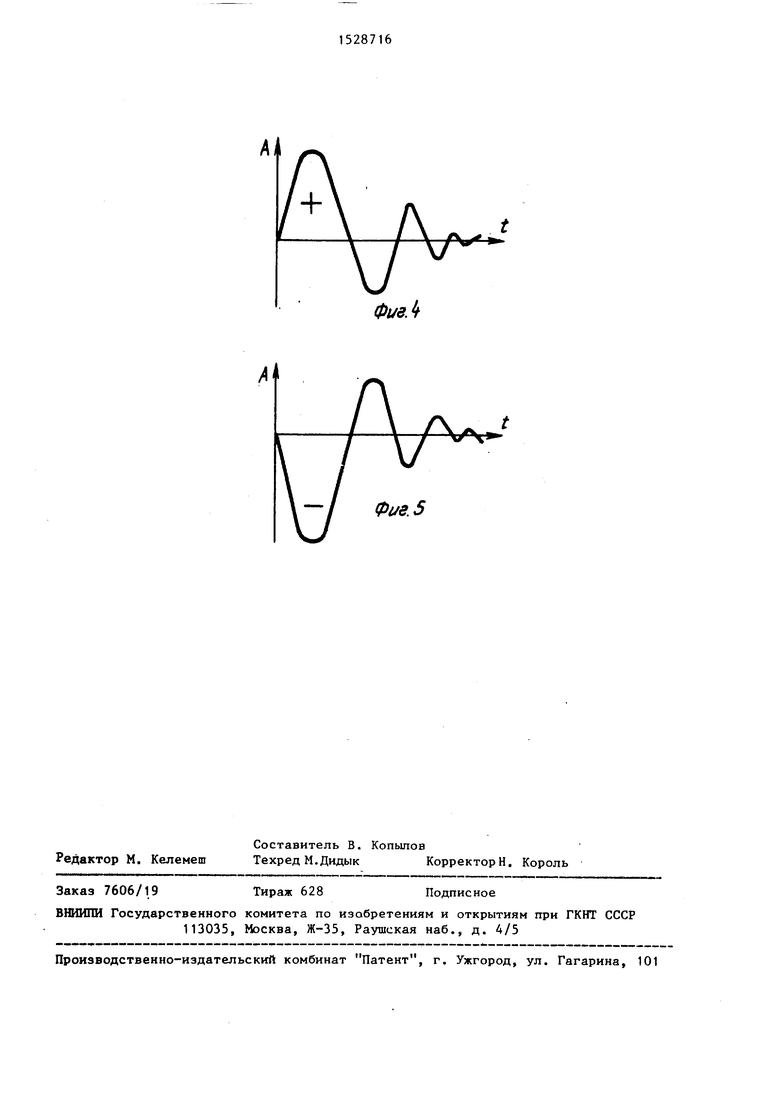
На фиг. 1 показана блок-схема устройства для осуществления способа контроля состояния направляющих проводников; на фиг. 2 - подъемный сосуд с размещенными в нем направленными датчиками сейсмического типа, поперечное сечение; на фиг. 3 - отрезок регистрирующей ленты самописца, на котором зафиксированы импульсы ударных нагрузок; на фиг. 4 - график затухающих колебаний направленного датчика сейсмического типа с положительной амплитудой первой гармоники собственных колебаний с нулевой фазой; на фиг.5- то же, с отрицательной первой амплитудой собственных колебаний с фазой 180.
Способ контроля состояния направляющих проводников осуществляется с помощью устройства (фиг. 1), состоящего из передающей станции 1, приемника 2 и блока 3 регистрации.
Передающая станция 1 расположена непосредственно в подъемном сосуде 4 и состоит из датчиков 5 динамических нагрузок, выполненных в виде вибродатчиков сейсмического типа, и передатчика 6, например, токов высокой частоты. Передатчик 6 имеет индуктивную связь с подъемным канатом 7 посредством присоединительного высокочастотного трансформатора 8. Трансформатор 8 выполнен из ферритового магнито провода кольцевой формы, охватывающего подъемный канат 7 над подъемным сосудом 4. Подъемный канат является одновитковой вторичной обмоткой трансформатора 8, первичная обмотка раз-, мещена на его магнитопроводе.
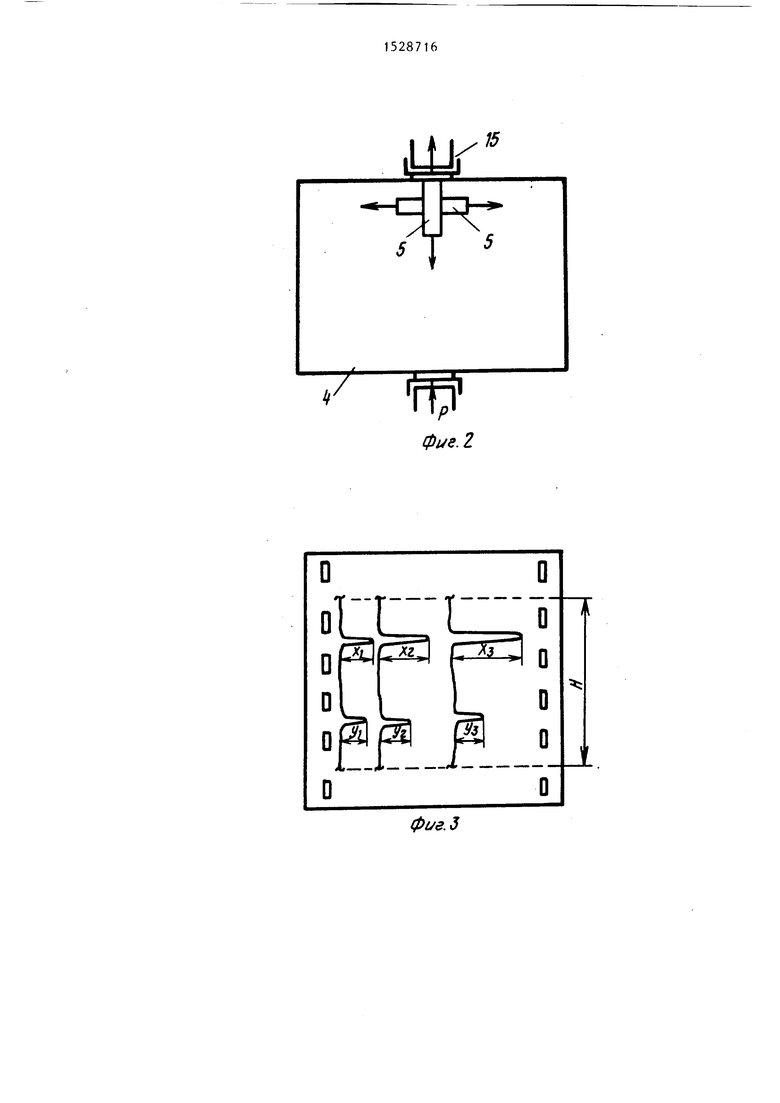
Датчики 5 (фиг. 2) закреплены на стенке подъемного сосуда 4 в месте установки одного из направляющих баш- . маков, движущихся по направляющим проводникам. Датчики 5 закреплены на подъемном сосуде 4 так, чтобы они могли воспринимать удары, например, в двух взаимно перпендикулярных горизонтальных направлениях. Такое закреп- ление датчиков 5 необходимо для возможности определения направлений ударов.
55
0
.
Первый направленный датчик 5 сориентирован вдоль подъемного сосуда и образует первый канал передачи информации, второй датчик 5 сориентирован поперек подъемного сосуда и образует второй канал. Собственные частоты датчиков берут разными, например 50 и 120 Гц. По этим частотам разделяются в блоке 3 регистрации первый и второй каналы.
Возможна установка и трех датчиков 5, сориентированных в трехмерном пространстве. При зтом возможно определение направлений ударов в трехмерном пространстве - в двух горизонтальных направлениях и дополнительно в вертикальном.
Передатчик 6 закреплен вверху подъемного сосуда 4. Он снабжен минимум двумя входами для присоединения датчиков 5, его выход соединен с трансформатором В.
Приемник 2 включает собственно при- 5 емник, соединенный с трансформатором 9 высокой частоты. Трансформатор 9 также выполнен из ферритового кольцевого сердечника с обмоткой и закреп- ен вверху подъемного каната 7 таким образом, чтобы канат :врбодно проходил при движении подъемного сосуда через окно магнитопровода трансформа-, тора 9.
Блок 3 регистрации состоит из блока 10 фильтров, регистрирующего устройства 11, индикатора 12 электрических колебаний и переключателя 13.
Блок 10 фильтров состоит из двух низкочастотных фильтров, каждый из которых настроен на собственную частоту колебаний одного из датчиков 5. При применении трех датчиков 5 блок 10 фильтров берут трехканальным. Вход блока 10 фильтров присоединен к выходу приемника 2, а выходы блока 10 фильтров - на входы регистрирующего устройства 11.
Привод протяжки регистрирующей ленты в самопищущем приборе связан с выходом датчика J4 местоположения подъемного сосуда.
0
5
0
5
Переключатель 13 предназначен для присоединения индикатора 12 на один из выходов блока 10, Приемник 2 и блок 3 регистрации располагаются у пульта управления подъемной машиной. Приемник 2 связан с трансформатором 9 ад- аксиальным кабелем. Подъемный сосуд
15
перемещается вдоль направляющих про- водннкоп 15.
Предлагаемый способ осуществляют следующим образом.
После установки на подъемной магаи- не аппаратуры дистанционного контроля динамических нагрузок на направляющие проводники производят ее тарировку. При этом в мастах крепления датчиков 5 наносят удары известной величины по направлениям действия датчиков 5 и фиксируют максимальные величины амплитуд электрических колебаний датчиков 5 на регистрирующих лентах регист рирующего устройства 11, установленного у пульта управления подъемной машиной .
По величине силы удара и величине амплитуды первой гармоники колебаний датчиков 5, записанной на регистрирующей ленте, определяют цену деления шкалы самопищущего прибора 11. Затем определяют для каждого датчика 5 фазо провку, т.е. соответствие направления удара фазе записанной амплитуды первой гармоники на ленте самописца 11.
При движении подъемного сосуда 4 по новым направляющим проводникам 15 скольжение башмаков происходит плавно и ударные нагрузки отсутствуют. По мере износа направляющих проводников 15 при движении подъемного сосуда 4 происходят удары последнего о проводники 15. Чем больше износ направляю- рих проводников 15, тем больше удары. Удары возбуждают вибрации подъемных сосудов 4. Эти вибрации датчиками 5 воспринимаются и преобразуются в затухающие электрические колебания, частота каждого из которых определяется собственной частотой механических колебаний.
Выработанные датчиками 5 электрические колебания подают в передатчик 6, где их смешивают, усиливают и модулируют высокочастотные электрические колебания. С передатчика 6 модулированные высокочастотные электрические колебания подают на вход приемни- ка 2 через трансформатор 8, подъемный канат 7 и трансформатор 9. В приемнике 2 эти колебания детектируют и усиливают и с выхода приемника 2 подают на вход блока 10 фильтров, где их разделяют по частотам собственных колебаний каждого из датчиков 5.
Из блока 10 фильтров разделенные сигналы датчиков 5 подают по отдель-
д |г 2025
зо дО
45 50з
35
16
ным каналам на регистрирующее устройство 1 1 .
В блоке 3 регистрации сигналы каждого датчика 5 записывают на ленте в функции глубины подъема Н, обычно в масштабе 1:4000, 1:2000. Поэтому, так как регистрирующая лента движется очень медленно, на диаграмме весь цикл затухаюп его электрического колебания датчика 5 записывается в виде штриха (фиг. 3).
На фиг. 3 показана регистрирующая лента самописца, на которой нанесены диаграммы трех циклов подъема, записанные по второму каналу по сигналам датчика 5, направленного поперек . подъемного сосуда (индексами X и Y обозначены величины амплитуд, характеризующих электрические колебания датчика 5, работающего по второму каналу).
По записанным диаграммам определяют силу удара по величине амплитуды (X или Y) первой гармоники электрических колебаний датчика 5 и цене деления шкалы самопищущего прибора. Сверяя записи с результатами тарировки, определяют направление удара по подъемному сосуду. Например, при фазе первой ам- плитуды первой гармоники, равной О , удар происходит справа, при 180 - слева.
При отсутствии сигналов по второму каналу направление удара в точности совпадает с осью первого датчика.
При значительном несовпадении направления удара с направленноСтями датчиков 5 контроль ведут по показаниям двух датчиков 5. Направление удара определяют из соотношений:
Ai .. А, Sinq
-.JA
А
,.А4
Ц arcng --;
Ц), +Ср, 90 ,
де Ц|, - угол между осью направления удара и осью направленности первого датчика 5; Cpj - угол между осью направления удара и осью направленности второго датчика 5; А, - первая амплитуда первой гармоники колебаний первого датчика 5;
А - первая амплитуда первой гармоники колебаний второго датчика 5.
Пример. Пусть удары силой 500 кгс наносят по подъемному сосуду со стороны, противоположной месту крепления датчиков 5 (фиг. 2). Удар направлен в сторону центра подъемного сосуда и совпадает с направленностью второго датчика 5.
При этом второй датчик 5 будет вырабатывать электрические сигналы, а первый датчик 5 работать не будет. Регистрирующее устройство 11 будет фиксировать только сигналы второго датчика 5 по второму каналу.
Сигналы, записанные на регистрирующей ленте, имеют вид, обозначенный на фиг. 3 индексами , По этим данным определяют, что на определенной глубине Н возникают прогрессирующие удары, таящие в себе большую опасность. Регистрация сигналов по второму каналу говорит о том, что уда ры происходят в поперечном направлении. По индикатору 12 или записи определяют, что первая амплитуда первой гармоники колебаний датчика 5 имеет, фазу О . Согласно полученным данным при тарировке фаза О первой амплитуды соответствует направлению удара Р, как показано на фиг. 2.
Полученные данные передают ремонтной бригаде, где указывается сила удара Р и его направление, а также указывают, о..какой направляющий проводник ударяется подъемный сосуд и .на какой отметке (глубине). Сообща- ется также, что удар прогрессирует. Если удар не прогрессирует и незначителен по величине, то оператор может принять решение о продолжении работы подъемной установки. На фиг. 3 непрогрессирующие удары обозначены индекса- ми YI, у,,, Yj.
; Таким образом, по величинам первой амплитуды и ее фазы первой гармоники, записанным в зависимости от мес Чоположению подъемного сосуда и их изменениям при эксплуатации шахтных подъемных установок, судят о состоя
НИИ направляюш 1х лроводников, степени
износа и качестве крепления их в стволе шахты.
Формула изобретения
10
15
0
5
0
35
40
45
0
1.Способ контроля перемещения подъемного сосуда в стволе шахты, включающий измерение динамических нагрузок, воздействующих на направляющие проводники при движении по ним подъемных сосудов преобразовании величин нагрузок в электрические сигналы, регистрации этих сигналов и определении местоположения подъемного сосуда, отличающийся тем, что, с целью повышения достоверности контроля состояния направляющих проводников, в качестве динамических нагрузок измеряют в процессе эксплуатации во взаимно перпендикулярных направлениях; вибрацию подъемного сосуда, выделяют первую гармонику вибрации, первую амплитуду и ее фазу, которые регистрируют в соответствии с местоположением подъемного сосуда, сравнивают между собой величины первых амплитуд и их фаз, соответствующих одинаковому местоположению подъемного сосуда, и по результатам сравнения судят о состоянии направляющих проводников.
2.Устройство для контроля перемещения подъемного сосуда в стволе шахты, содержащее датчики динамических нагрузок, соединенные с передатчиком, который через первый трансформатор и приемник соединен с первым входом блока регистрации, отличающее- с я тем, что, с целью повышения достоверности контроля состояния направ- проводников, в него введен датчик местоположения, подъемного сосуда, выход которого соединен с вторым входом блока регистрации, причем датчики динамических нагрузок вьпюлнены в виде вибродатчиков с заданной частотой собственных колебаний и установлены
во взаимно перпендикулярных направлениях.
Ш:
15

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля перемещения подъемного сосуда в стволе шахты | 1988 |
|
SU1616851A1 |
| СПОСОБ РЕГИСТРАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ НА АКВАТОРИИ МОРЯ ПРИ ПОИСКЕ ПОДВОДНЫХ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ | 2011 |
|
RU2483330C1 |
| СПОСОБ И ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НЕИСПРАВНОСТИ В КАБЕЛЬНОЙ БУРИЛЬНОЙ ТРУБЕ | 2007 |
|
RU2436109C2 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ НАПУСКА ТЯГОВЫХ КАНАТОВ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1992 |
|
RU2061643C1 |
| СПОСОБ ПЕРЕДАЧИ-ПРИЕМА ИНФОРМАЦИИ В УСЛОВИЯХ ШАХТНОГО СТВОЛА ПО ЛИНИИ СВЯЗИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2022904C1 |
| СПОСОБ РЕГИСТРАЦИИ СЕЙСМИЧЕСКИХ СИГНАЛОВ НА АКВАТОРИИ МОРЯ ПРИ ПОИСКЕ ПОДВОДНЫХ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ | 2010 |
|
RU2434250C1 |
| Способ защиты шахтной подъемной установки от напуска тягового каната | 1989 |
|
SU1745660A1 |
| СПОСОБ ЗАЩИТЫ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ ОТ НАПУСКА ТЯГОВЫХ КАНАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2031830C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СПОСОБ ОПРЕДЕЛЕНИЯ ЗАЛЕГАНИЯ ПРОДУКТИВНЫХ НА УГЛЕВОДОРОДЫ ПЛАСТОВ И СЕЙСМИЧЕСКАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2433425C2 |
| СИСТЕМА МИКРОСЕЙСМИЧЕСКОГО ЗОНДИРОВАНИЯ ЗЕМНОЙ КОРЫ И ПРОВЕДЕНИЯ СЕЙСМИЧЕСКОГО МОНИТОРИНГА | 2012 |
|
RU2498357C1 |
Изобретение относится к шахтному подъему и может найти применение в аналогичном транспортном оборудовании. Цель изобретения - повышение достоверности контроля состояния направляющих проводников (НП). В подъемном сосуде (ПС) 4 во взаимно перпендикулярных направлениях с помощью соответствующих вибродатчиков (ВД) 5 измеряют в качестве динамических нагрузок величины первой амплитуды и ее фазы первой гармоники вибрации ПС 4. Кроме того, определяют одновременно местоположение ПС 4 в стволе соответствующим датчиком 14 шахты. Сигналы о вибрации с ВД 5, преобразованные в электрические сигналы, передают передатчиком 6 вдоль подъемного каната 7, принимают приемником 2 и регистрируют в блоке 3 регистрации, причем сигналы с ВД 5 регистрируют в зависимости от местоположения ПС 4. О состоянии НП 15 судят по величинам первой амплитуды и ее фазы первой гармоники вибрации ПС 4 от ударов о НП 15 и их изменениям при эксплуатации шахтных подъемных установок. 2 с.п. ф-лы, 5 ил.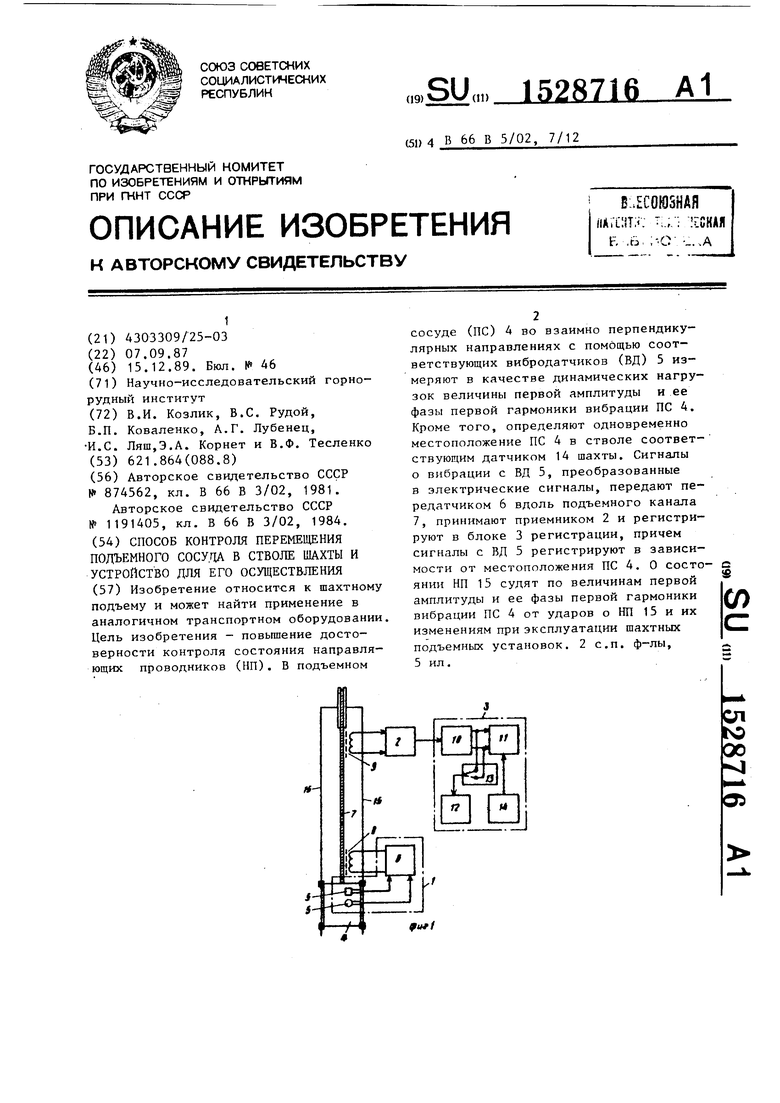
,/
Л
гр
0i/s.2
0L/e.S
- / Фие.5
Редактор М. Келемеш
Составитель В. Копьшов
Техред М.Дидык КорректорН. Король
Заказ 7606/19
Тираж 628
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
0i/e.k
Подписное
| Способ контроля перемещения подъемного сосуда в стволе шахты и устройство для его осуществления | 1979 |
|
SU874562A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Способ контроля перемещения подъемного сосуда в стволе шахты и устройство для его осуществления | 1984 |
|
SU1191405A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
