Изобретение относится к шахтному подъему и может найти применение в промышленном подъемно-транспортном оборудовании.
Целъ изобретения - повышение надежности контроля.
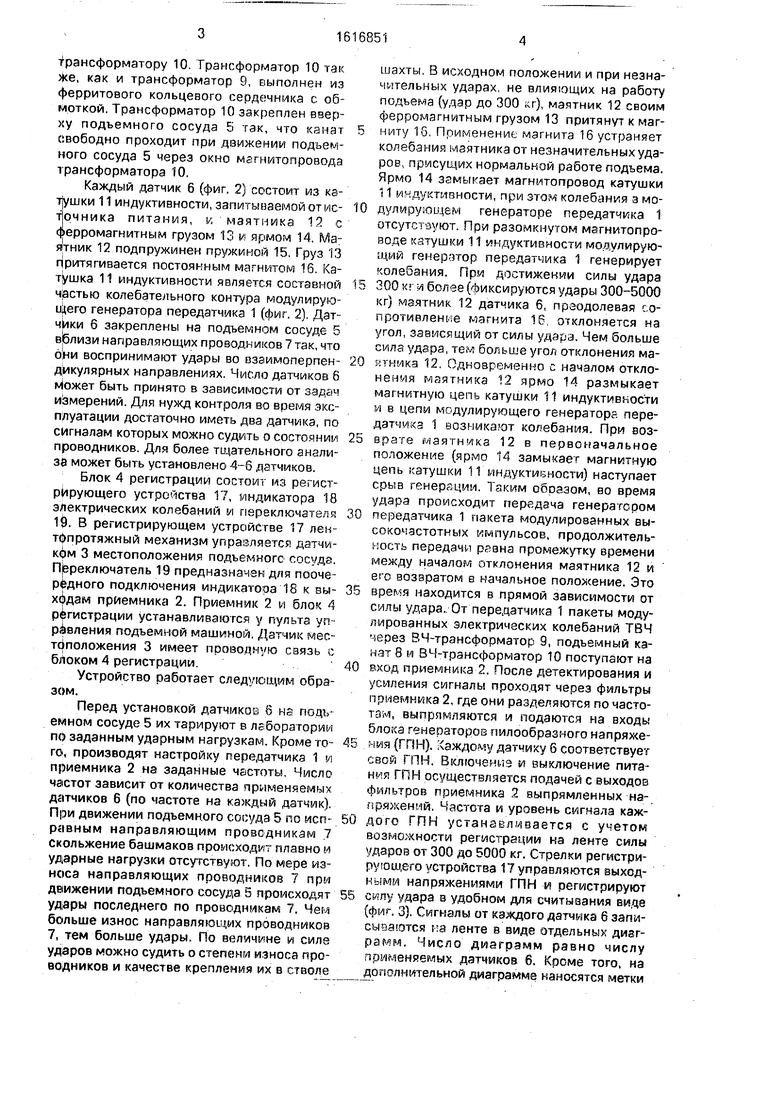
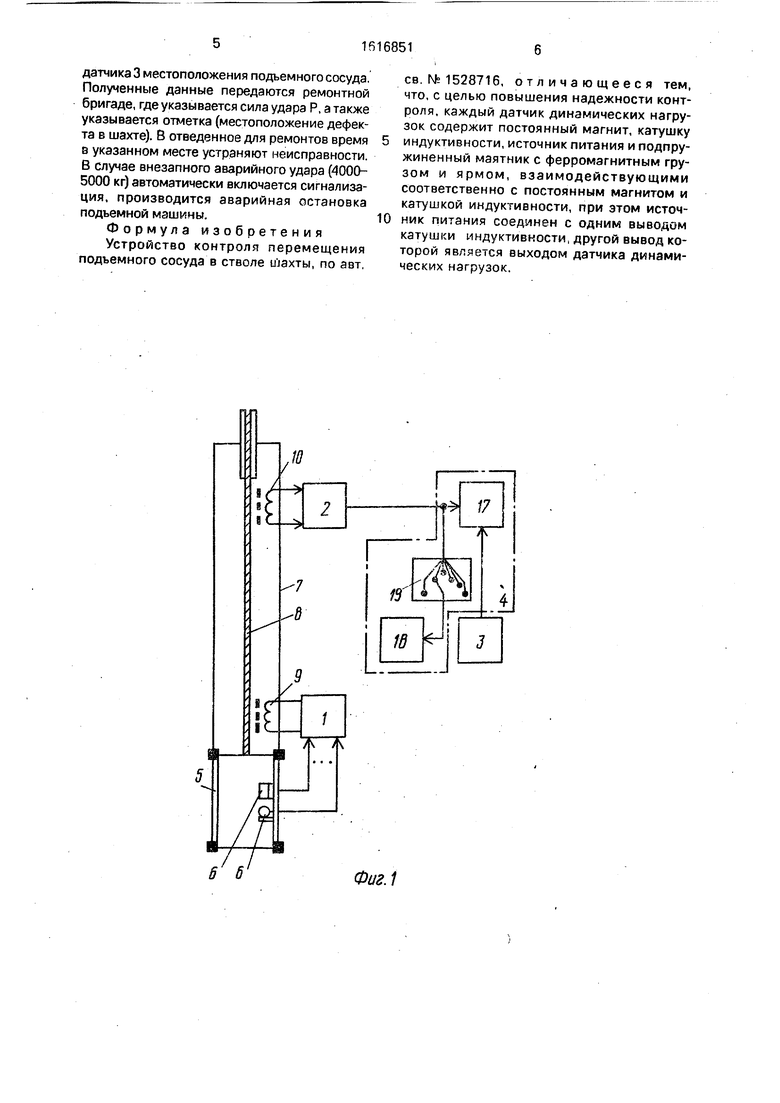
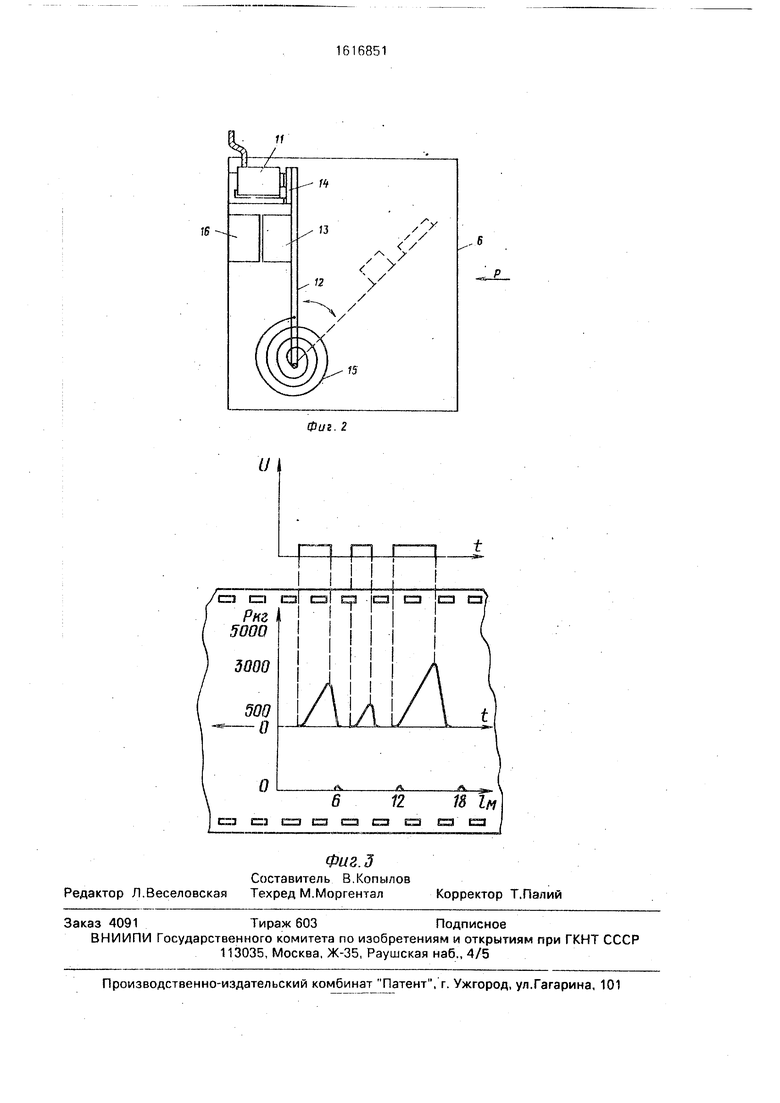
На фиг. 1 показана блок-схема устройства; на фиг. 2 - схема датчика динамических нагрузок: на фиг. 3 - запись ударов на ленте блока регистрации.
Устройство (фиг. 1) состоит из передатчика 1, приемника 2, датчика 3 местоположения подъемного сосуда, блока 4 регистрации, подъемного сосуда 5, направленных датчиков 6 динамических нагрузок, направляющих проводников 7. Передатчик
1, например, токов высокой частоты (ТВЧ) имеет индуктивную связь с подъемным канатом 8 посредством присоединителъного высокочастотного трансформатора 9. Трансформатор 9 выполнен из ферритового магнитопровода кольцевой формы, охватывающего подъемный канат 8 над подъемным сосудом 5. Подъемный канат 8 является од- новитковой первичной обмоткой трансформатора 9, вторичная обмотка выполнена на его магнитопроводе (фиг. 1).
Передатчик 1 закреплен вверху подъемного сосуда 5, снабжен модулятором на шесть частот (по частоте на датчик) с шестью входами для присоединения датчиков 6. Приемник 2 подключен к высокочастотному
00
ел
трансформатору 10. Трансформатор 10 так же, как и трансформатор 9, выполнен из ферритового кольцевого сердечника с обмоткой. Трансформатор 10 закреплен вверху подъемного сосуда 5 так, что канат свободно проходит при движении подьем- ного сосуда 5 через окно магнитопровода трансформатора 10,
Каждый датчик 6 (фиг. 2) состоит из ка- 11 индуктивности, запитываемой от ис- т|рчника питан,1я, к маятника 12 с 1| ерромагнитным грузом 13 i/s ярмом 14. Ма- 12 подпружинен пружиной 15. Груз 13 притягивается постоянным магнитом 16. Катушка 11 индуктивности является составной частью колебательного конг/ра модулирующего генератора передатчика 1 (фиг. 2), Датчики 6 закреплены на подъемном сосуде 5 врлизи направляющих проводников 7 так, что оИи воспринимают удары во взаимоперпендикулярных направлениях. Число датчиков 6 Может быть принято в зависимости от задач измерений. Для нужд контроля во время эксплуатации достаточно иметь два датчика, по сигналам которых можно судить о состоянии проводников. Для более тщательного анализа может быть установлено 4-6 датчиков.
Блок 4 регистрации состоит из регистрирующего устройства 17, мндикатора 18 электрических колебаний м переключателя 19. В регистрирующем устройстве 17 лен- тфпротяжный механизм упразляется датчи- кфм 3 местоположения подъемного сосуда. Переключатель 19 предназначен для пооче- р дного подключения индикатора 18 к вы- хфдам приемника 2. Приемн81к 2 и блок 4 регистрации устанавливаются у пульта уп- р вления подъемной машиной. Датчик мес- тбположения 3 имеет проводную связь с блоком 4 регистрации.
Устройство работает следующим образом.
Перед установкой датчиков б на подъемном сосуде 5 их тарируют в лаборатории п0 заданным ударным нагрузкам. Кроме того, производят настройку передатчика 1 м приемника 2 на заданные частоты. Число частот зависит от количества применяемых датчиков 6 (по частоте на каждый датчик). При движении подъемного сосуда 5 по исправным направляющим проводникам 7 Скольжение башмаков происходит плавно м ударные нагрузки отсутствуют. По мере износа направляющих пройодников 7 при движении подъемного сосуда 5 происхо,цят удары последнего по проводникам 7. Чем больше износ направляющих проводников 7, тем больше удары. По величине и силе ударов можно судить о степени износа проводников и качестве крепления их в етволе
шахты. В исходном положении и при незначительных ударах, не влияющих на работу подъема (удар до 300 кг), маятник 12 своим ферромагнитным грузом 13 притянут к маг- 5 ниту 16. Применение магнита 16 устраняет колебаний маятника от незначительных ударов, присув их нормальной работе подъема. Ярмо 14 замыкает магнмтопровод катушки 11 индуктивности, при зтом колебания а мо- 10 дулирующем генераторе передатчика 1 отсутстзуют. Пря разомкнутом магнитопро- воде катушки 11 индуктивности модулирующий генератор передатчика 1 генерирует колебания. При достижении силы удара 15 300кг и более (фиксируются удары 300-5000 кг) маятник 12 датчика 6, преодолевая со- про.ивление магнита 16, отклоняется на угол, зависящий от силы удара. Чем больше сила удара, тем больше угол отклонения ма- 20 ятникз 12. Одновременно с началом отклонения маятника 12 ярмо 14 размыкает магнитную цепь катушки 11 индуктивности и в цепи модулирующего генератора передатчика 1 возникают колебания. При воз- 25 арате маятника 12 в первоначальное положение (ярмо 14 замыкает магнитную цепь катушки 11 индуктивности) наступает срыв генерации. Таким образом, во время удара происходит передача генератором JO передатчика 1 пакета модулированных высокочастотных импульсов, продолжительность передачи ргэвна промежутку времени между началом отклонения маятника 12 и его возвратом в начальное положение. Это 35 находится в прямой зависимости от силы удара.. От передатчика 1 пакеты модулированных электрических колебаний ТВЧ через ВЧ-трансформатор 9, подъемный канат 8 и ВЧ-трансформатор 10 поступают на 40 вход приемника 2. После детектирования и усиления сигналы проходят через фильтры приемника 2, где они разделяются по часто- rasv, выпрямляются и подаются на входы блока генераторов пилообразного напрях е- 4о имя (ГПН). .(аждому датчику 6 соответствует свой I ПН. Включениэ и выключение питания ГПН осуществляется подачей с выходов фильтров приемника 2 выпрямленных на- гфяжений. Частота и уровень сигнала каж- 5U доге ГПН устанавл)/эвается с учетом возможности регистрации на ленте силы ударов от 300 до 5000 кг. Стрелки регистри- РУюшжо устройства 17 управляются выход- нымр/1 напряжениями ГПН и регистрируют 55 силу удара в удобном для считывания виде (фиг. 3). Сигналы от каждого датчика 6 записываются на ленте в виде отдельных диаграмм. Число диаграмм равно числу применяемых датчиков 6. Кроме того, на дополнительной диаграмме наносятся метки
датчика 3 местоположения подъемного сосуда. Полученные данные передаются ремонтной бригаде, где указывается сила удара Р, а также указывается отметка (местоположение дефекта в шахте). В отведенное для ремонтов время в указанном месте устраняют неисправности. В случае внезапного аварийного удара (4000- 5000 кг) автоматически включается сигнализация, производится аварийная остановка подъемной машины.
Формула изобретения Устройство контроля перемещения подъемного сосуда в стволе Шахты, по авт,
0
св. №1528716, отличающееся тем, что, с целъю повышения надежности контроля, каждый датчик динамических нагрузок содержит постоянный магнит, катушку индуктивности, источник питания и подпружиненный маятник с ферромагнитным грузом и ярмом, взаимодействующими соответственно с постоянным магнитом и катушкой индуктивности, при зтом источник питания соединен с одним выводом катушки индуктивности, другой вывод которой является выходом датчика динамических нагрузок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля и устройство для его осуществления | 1987 |
|
SU1528716A1 |
| Датчик угла наклона объекта | 1990 |
|
SU1747872A1 |
| Способ защиты шахтной подъемной установки от напуска тягового каната | 1989 |
|
SU1745660A1 |
| Устройство для контроля натяжения каната шахтной подъемной установки | 1986 |
|
SU1342856A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ НАПУСКА ТЯГОВЫХ КАНАТОВ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1992 |
|
RU2061643C1 |
| СПОСОБ ВЗВЕШИВАНИЯ ПОЛЕЗНОГО ГРУЗА В ПОДЪЕМНОМ СОСУДЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2124468C1 |
| СИСТЕМА ДЛЯ ПРЕДУПРЕЖДЕНИЯ О ЗЕМЛЕТРЯСЕНИЯХ И ЦУНАМИ | 2005 |
|
RU2290671C1 |
| СПОСОБ И ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НЕИСПРАВНОСТИ В КАБЕЛЬНОЙ БУРИЛЬНОЙ ТРУБЕ | 2007 |
|
RU2436109C2 |
| СИСТЕМА ДЛЯ ПРЕДУПРЕЖДЕНИЯ О ЗЕМЛЕТРЯСЕНИЯХ И ЦУНАМИ | 2007 |
|
RU2349939C1 |
| Устройство сигнализации о напуске головного каната подъемной установки | 1989 |
|
SU1713877A1 |
Изобретение относится к шахтному подъему и может найти применение в промышленном подъемно-транспортном оборудовании. Цель изобретения - повышение надежности контроля перемещения подъемного сосуда (ПС) в стволе шахты. Изобретение содержит передатчик 1, приемник 2, датчик 3 местоположения ПС 5, блок 4 регистрации, направленные датчики 6 динамических нагрузок, направляющие проводники (НП) 7, подъемный канат 8 и высокочастотные трансформаторы 9 и 10. Датчики 6 содержат катушку индуктивности, запитываемую от источника питания, и маятник с ферромагнитным грузом и ярмом, подпружиненный пружиной. Груз притягивается в исходное положение постоянным магнитом. При движении ПС 5 по НП 7, если НП 7 неисправны, ПС 5 ударяется об них. Если сила удара превышает заданную минимальную, маятник отклоняется от исходного положения. При этом разрывается магнитная цепь катушки, и передатчик 1 генерирует колебания, которые через трансформатор 9, подъемный канат 8 и трансформатор 10 поступают в приемник 2. В нем происходит идентификация сигнала соответствующему датчику 6. Выходные сигналы приемника 2 регистрируются в блоке 4 в соответствии с местоположением ПС 5. 3 ил.
Фиг. 1
I III
a en
Ркг 5000
дООО
500 -О
| Способ контроля и устройство для его осуществления | 1987 |
|
SU1528716A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
