СП
со
ос
4
Изобретение относится к сельскому хозяйству, и может быть использовано при создании систем ангоматического унравле- ния движением самоходных сельскохозяйственных .
Цель изо6рет ния повышение надож- ности управления.
На чер южс прсдс гшлена схема связей функциональных блоков, расположенных на ведимой машине.
Система д:1Я группового вождения самоходных сельскохозяйственных машин содержит на ведомой восприни.маюшие элементы системы ориентации, выполненные в виде орто1чя альных рамок 1 и 2 Выход ра.мки I через фазовращатель 3 соединен с одним из входов первого сумматора 4 и входом nepBoi o электрически управляемого аттенюатора 5. Другой вход первого сумматора 4 и вход второго э,лек- трически управляемого аттенюатора 6 подключены к рамке 2. Выходы первого и второго аттенюаторов 5 и 6 соединены с входами первого и второг о делителей 7 и 8 напряжения с входами второго и третьего сумматоров 9 и 10, выходы которых через первый и второй амплитудные детекторы И и 12 подключены к логическому автомату 13. Выход первого сумматора 4 подключен к ограничителю 14 и амплитудному детектору 15, выход которого соединен с входом функционального преобразователя 16. выходное напряжение которого подано на управляюи1ие входы первого и второго аттенюаторов 5 и 6.
Кроме того, па ведомой машине расположены приемник 17 команд управления, вход которого подключен к четвертьколно вому вибратору 18, а выход через фильт) 19 и ограничите;1ь 20 связан с сътним из входов фазового детектора 21, па другой ввход которого через ограничигель 14 подуется напряжение с выхода первого сумма тора 4. При этом выход фазового детектора 21 соединен с выходом логического автомата 13.
Система работает следующим образом.
Сигналы с приемных рамок 1 и 2 с учетом фазового сдвига в фазовращателе 3 юсту- пают на вход первого сумматора 4. lia выходе сумматора 4 получается напряжение, амплитуда которого не зависит от курсовых углов машин Н и ц, по из.меняется и зависимости от расстояния между нами. Величина этого напряжения обратно пропорпионал1 на кубу расстояния г между машинами. Далее это напряжение детектируется липейпым а.мплитудным детектором 15 и поступает на вход функционального преобразователя 16. который фор.ми- рует управляющее напряжение аттенюато ров 5 и 6 так, чтобы их выходное напряжение было пропорционально первой степени расстояния между ма1пинами. Этого можно достичь, если выходное напряжение функционального преобразователя 17 пропорционально четвертой степени расстояния между машинами Таким образом, можно обес- - печить пропорциональность напряжений .1,,„1 и М ,.Mj отклонениям . и ЛУ.
С выхода электрически управляемых аттенюаторов 5 и 6 сигналы поступают на соогветствующие делители 7 и 8 напряжений, которые совместно с сумматорами
9 и 10 и а.мплитудными детекторами II и 12 участвуют в линейном преобразовании сигналов. На выходе амплитудных детекторов II и 12 формируются нанряжения сигналов, зависяп1ие от курсового угла водо5 мой .машины. Да;1ее ,чы поступают на логический автомат 13, содержаний три идентичных капала.
)временно сигна, с выхода четверть- во,11Но;-1П|ч; вибратора 8 поступает па вход прием1;ика 18 команд управления, где де тектируется и после фильтрации фильтром 19 и ограничения огранпчите.лем 20 используется в качестве опорного сигнала в фазо вом детекторе 21. На другой вход фазового детектора 21 через ограничитель 14 посту5 пает сигнал с вы.хола первого сум.ма- тора 4.
На выходе фазового детектора появля- егся напряжение, зависящее от разности курсовых углов ведущей и ведомой ма1пип. Далее сигнал с выхода фазового детектора
0 2 поступает на о.тип из входов .логическою автомата 13.
Устрсжство производит функциональное преобразован1 е амп.литуд си1 на. юв, что обеспечивает прогк ригк иальность отс.лежива- ния гриокторип как при малых, так и при
5 Г) отклонениях ведомой маслины от ее исходного положения. .Это позволяет в конечном счете повысить надежность пропесса отслеживания, а также уве.лпчить точность системы и це. юм при вхождении в
Q сел я ю щи и режим.
Формула изобретения
Система для группового (вождения самоходных сельскохозяйственных машин, 5 содержаП1,ая передатчик с(:стемы ориентации с двумя передаюЕппми рамочными взаимно перпендикулярными антен 1ами для установки на 1 едуп1ей машине, воспринимаю- шyKJ схему для установки на ведомой ма- nJHHe, содержа шую взаимно 11ерг1ендику0
лярные рамочные антенны, одна из которых
непосредственно, а другая через фазовращатель подк. почены к входа.м первого сумматора, выход KOTopoi o через первый ограничитель связан с первым нхсдом фазового дегектора. к второму входу которого через 1|)и. 1 второй (.1|-1::аннчил-ель подключе) приемник команд управления, прн этом
выход фазового детектора соединен с первым входом логического автомата, к второму и третьему входам последнего через первый и второй амплитудные детекторы подключены соответственно выходы второго и третьего сумматоров, первые входы которых соединены с выходом первого делителя напряжения, а второй вход второго сумматора через второй делитель напряжения подключен к второму входу третьего сумматора, отличающаяся тем, что, с целью повышения надежности управления, воспринимающая схема снабжена первым и вторым электрически управляющими аттенюаторами, третьим амплитудным детектором и функциональным преобразователем, при
этом вход первого электрически управляе мого аттенюатора связан с выходом второй приемной рамочной антенны, а вход второго электрически управляемого аттенюатора соединен с выходом фазовращателя, причем выход первого электрически управляемого аттенюатора подключен к входу первого делителя напряжения, а выход второго электрически управляемого аттенюатора - к входу второго делителя и второму входу третьего сумматора, кроме того, управляющие входы электрически управляемых аттенюаторов объединены и соединены с выходом функционального преобразователя, при этом вход последнего подключен к выходу первого сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для группового вождения самоходных сельскохозяйственных машин | 1984 |
|
SU1197573A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1985 |
|
SU1301332A2 |
| Устройство для автоматической подстройки частоты ультразвукового генератора | 1987 |
|
SU1450883A1 |
| Устройство контроля комбинационных составляющих сигнала нелинейного четырехполюсника | 1985 |
|
SU1264111A1 |
| Синтезатор частот | 1986 |
|
SU1385231A1 |
| КОРОТКОИМПУЛЬСНЫЙ МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ОДНОЙ ПЛОСКОСТИ | 2011 |
|
RU2460089C1 |
| Панорамный измеритель S-параметров | 1988 |
|
SU1617385A1 |
| Устройство автоматического измерения амплитудно-фазового распределения поля антенны | 1984 |
|
SU1272281A1 |
| Устройство формирования амплитудно- МОдулиРОВАННыХ СигНАлОВ | 1978 |
|
SU809477A1 |
| Усилитель высокочастотного сигнала | 1986 |
|
SU1460769A1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к системам следящего управления подвижными объектами. Цель изобретения - повышение надежности управления. Сигналы с приемных рамок 1 и 2 с учетом сдвига в фазовращателе 3 дают на выходе сумматора 4 напряжение, амплитуда и фаза которого не зависят от курсовых углов Θ и φ машин и пропорционально кубу расстояния R преобразуется блоком 16 в величину, пропорциональную первой степени R . Т.о. на выходах аттенюаторов получаются напряжения ΔUад1 и ΔUад2 пропорциональные отклонениям ΔХ и ΔY расстояния между машинами в Декартовых координатах. Т.о. обеспечивается пропорциональность отслеживания траектории как при малых, так и при больших отклонениях ведомой машины от заданного положения. 1 ил.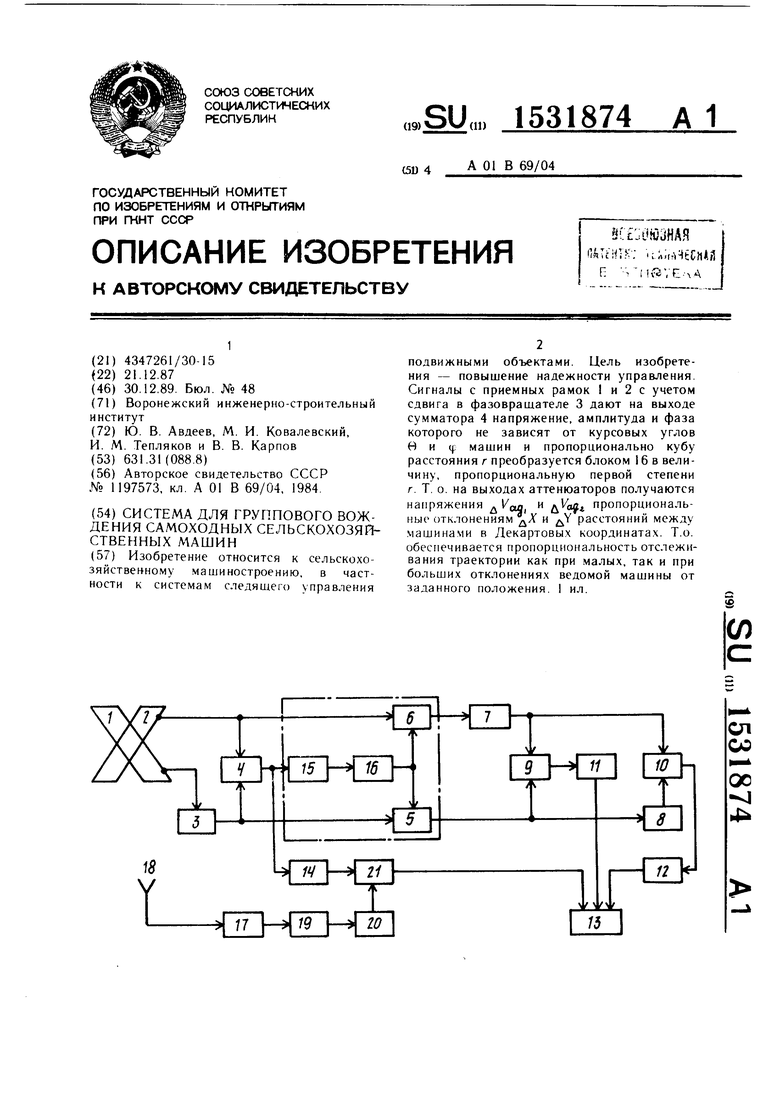
| Система для группового вождения самоходных сельскохозяйственных машин | 1984 |
|
SU1197573A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
