Изобретение относится к системам для автоматического управления движением самоходных сельскохозяйственных машин.
Цель изобретения - повышение точности управления, быстродействия и надежности при групповом вождении.
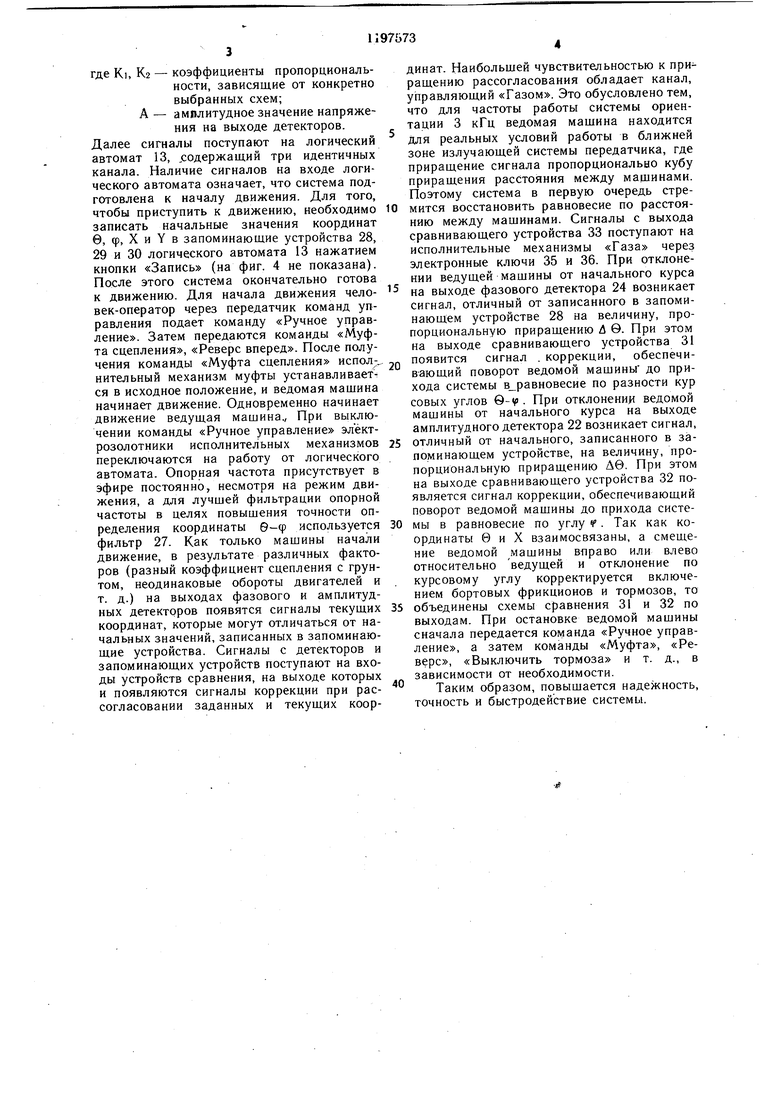
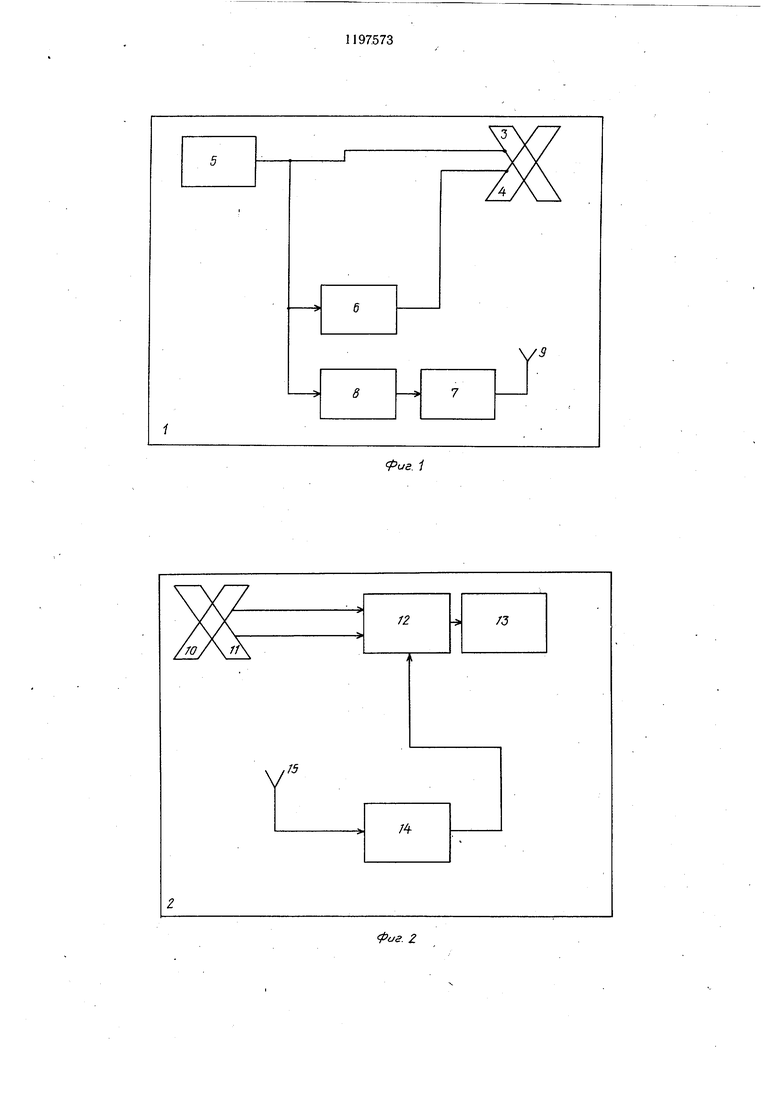
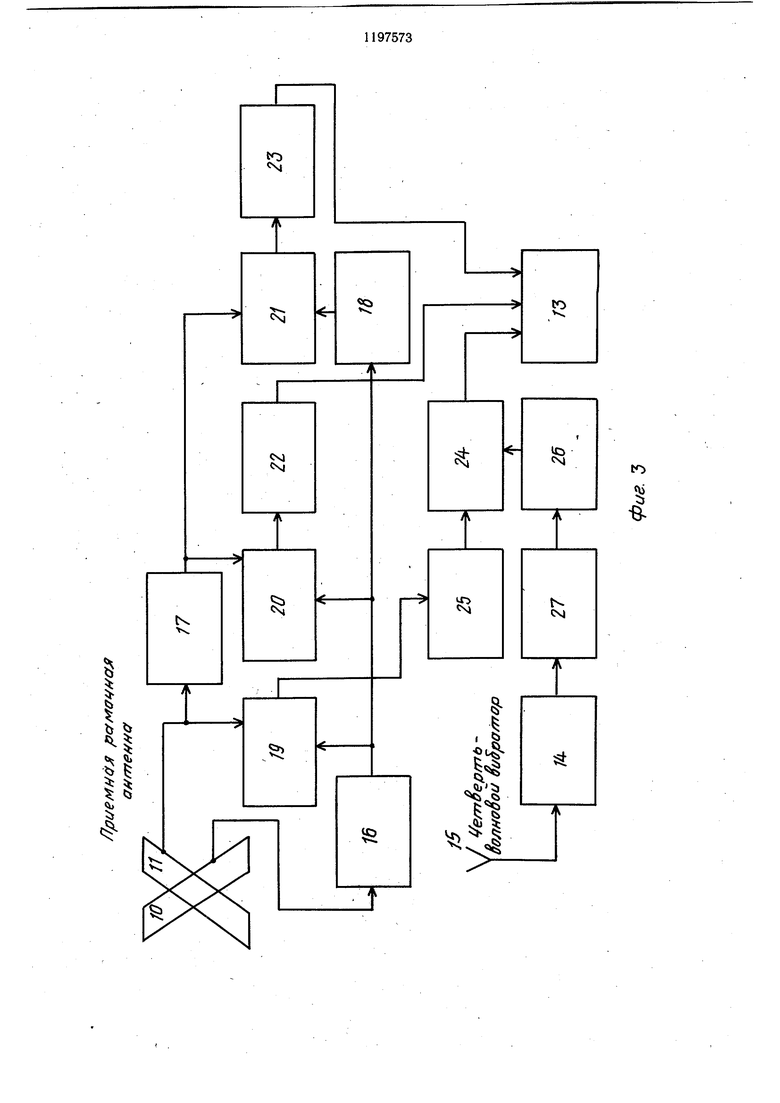
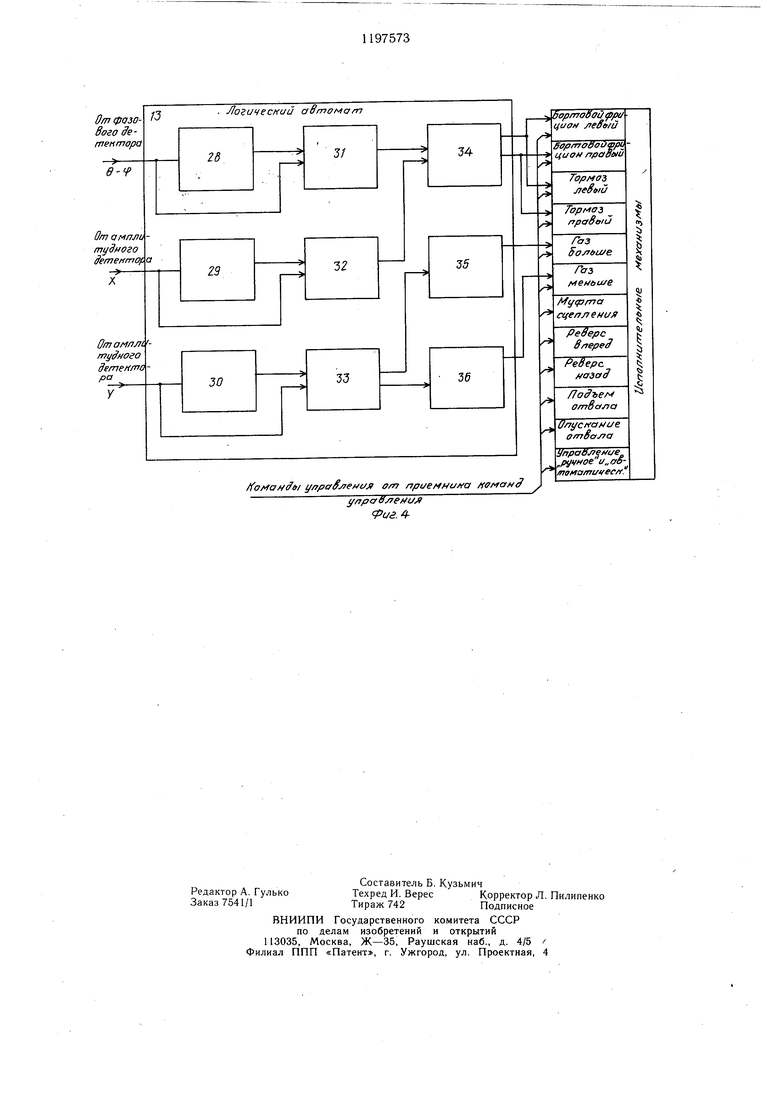
На фиг. 1 представлена схема ведущей машины; на фиг. 2 - схема ведомой машины; на фиг. 3 - функциональная схема воспринимающих элементов с устройством преобразования сигнала в координаты; на фиг. 4 - функциональная схема логического автомата и его связи с исполнительными механизмами.
Система для группового вождения сельскохозяйственных машин содержит ведущую машину 1 и ведомую машину 2. На ведущей машине 1 расположен ориентир в виде излучателя электромагнитного поля, выполненный в виде двух ортогональных рамок 3 и 4, и радиопередающее устройство 5 системы ориентации, причем одна из рамок 4 запитывается через фазовращатель 6. Кроме того, на ведущей мащине установлены передатчик 7 команд управления с модулятором 8, а антенной передатчика 7 команд управления служит четвертьволновый вибратор 9. На ведомой машине 2 расположены воспринимающие элементы системы ориентации, выполненные в виде ортогональных рамок 10 и 11, подк 1юченные к устройству 12 преобразования сигнала в координаты, выход которого соединен с логическим автоматом 13, кроме того, на ведомой машине установлен приемник 14 команд управления, антенной которого служит четвертьволновый вибратор 15. Функциональная схема воспринимающих элементов 10 и 11с устройством 12 преобразования сигнала в координаты и логическимавтоматом 13 содержит фазовращатель 16, делители напряжения 17 и 18, первый 19, второй 20 и третий 21 сумматоры, амплитудные детекторы 22 и 23, .фазовый детектор 24, ограничители 25 и 26, фильтр 27, на вход которого подается напряжение с выхода приемника 14 команд управления, антенной которого служит четвертьволновый вибратор 15. Логический автомат 13 содержит три идентичных канала и включает запоминающие устройства 28, 29 и 30 и сравнивающие устройства 31, 32 и 33, а также электронные ключи 34, 35 и 36, нецосредственно связанные с исполнительными механизмами. Передатчик 7 кбманд управления предназначен для передачи опорной частоты, которая необходима для определения координаты 0-ф на ведомой машине при ее автоматическом вождении, где 0 и ф - курсовые углы ведущей и ведомой машин. Передатчик команд управления служит для реализации возможности экстренного вмешательства человека-оператора в случае возникновения неожиданного препятствия на пути ведомой машины. При этом по радиоканалу передаются команды управления, управление ведомой машиной осуществляется в данном случае вручную. Команды управления, получаемые с выхода приемника ко манд управления, поступают на соответствующие золотники (не показаны), которые в свою очередь управляют исполнительными механизмами. При переходе на ручное управление ведомой машиной предварительно передается команда «Руч0 ное управление, которой осуществляется переключение электрозолотников на работу от приемника команд управления. В случае автоматического вождения золотники получают команды от логического автомата. Принцип построения логического автомата основан на запоминании начального уровня значения координаты в исходном положении при дальнейшем сравнении значения уровня текущих координат с исходным значением в процессе движения.
Система работает следующим образом. По установке ведущей и ведомой машин в исходное положение и включении аппаратуры сигнал с выхода передатчика системы ориентации поступает на рамочный излучатель 3 и через девяностоградусный фазовращатель 6 на передающий рамочный излучатель 4, которыми излучается в эфир на частоте 3 кГц. Кроме того, сигнал с передатчика системы ориентации поступает на модулятор 8 передатчика 7 команд управления, где происходит модуляция несущей частоты 166,5 МГц частотой 3 кГц, после него четвертьволновым вибратором 9 этот сигнал излучается в эфир. Сигнал, излученный передатчиком 5 системы ориентации, принимается рамочными приемными антеннами 10 и 11 и поступает на устройство 12 преобразования сигнала в координаты. Одновременно сигнал, излученный передатчиком команд управления, принимается четвертьволновым вибратором 15 и
0 поступает на приемник 14команд управления, где детектируется, и на выходе приемника появляется сигнал с частотой 3 кГц. Этот сигнал является опорным для фазового детектора 24. После обработки принятого сигнала в устройстве 12 преобразования сигнала в координаты на выходных элементах этого устройства появятся сигналы, пропорциональные значению координат. Этими элементами являются фазовый 24 и амплитудные 22 и 23 детекторы. На выходе фазового детектора появляется напряжение, зависящее от разности курсовых углов ведущей и ведомой машин 0-ф, а .на выходе амплитудных детекторов появляются напряжения сигналов, зависящие от курсового угла ведомой мащины, но изменяю5 щиеся по разным законам
f/a.A.,-|-KlA 5Шф; ба.д.г -f-K2A COS ф.
где Ki, К2 - коэффициенты пропорциональности, зависящие от конкретно выбранных схем;
А - амплитудное значение напряжения на выходе детекторов. Далее сигналы поступают на логический автомат 13, .содержащий три идентичных канала. Наличие сигналов на входе логического автомата означает, что система подготовлена к началу движения. Для того, чтобы приступить к движению, необходимо записать начальные значения координат 6, ср, X и Y в запоминающие устройства 28, 29 и 30 логического автомата 13 нажатием кнопки «Запись (на фиг. 4 не показана). После этого система окончательно готова к движению. Для начала движения человек-оператор через передатчик команд управления подает команду «Ручное управление. Затем передаются команды «Муфта сцепления, «Реверс вперед. После получения команды «Муфта сцепления испол-,, нительный механизм муфты устанавливает ся в исходное положение, и ведомая мащина начинает движение. Одновременно начинает движение ведущая машина., При выключении команды «Ручное управление электрозолотники исполнительных механизмов переключаются на работу от логического автомата. Опорная частота присутствует в эфире постоянно, несмотря на режим движения, а для лучшей фильтрации опорной частоты в целях повышения точности определения координаты ©-ф используется фильтр 27. Как только машины начали движение, в результате различных факторов (разный коэффициент сцепления с грунтом, неодинаковые обороты двигателей и т. д.) на выходах фазового и амплитудных детекторов появятся сигналы текущих координат, которые могут отличаться от начальных значений, записанных в запоминающие устройства. Сигналы с детекторов и запоминающих устройств поступают на входы устройств сравнения, на выходе которых и появляются сигналы коррекции при рассогласовании заданных и текущих координат. Наибольщей чувствительностью к приращению рассогласования обладает канал, управляющий «Газом. Это обусловлено тем, что для частоты работы системы ориентации 3 кГц ведомая мащина находится для реальных условий работы в ближней зоне излучающей системы передатчика, где приращение сигнала пропорционально кубу приращения расстояния между мащинами. Поэтому система в первую очередь стремится восстановить равновесие по расстоянию между машинами. Сигналы с выхода сравнивающего устройства 33 поступают на исполнительные механизмы «Газа через электронные ключи 35 и 36. При отклонении ведущей мащины от начального курса
на выходе фазового детектора 24 возникает сигнал, отличный от записанного в запоминающем устройстве 28 на величину, пропорциональную приращению d 0. При этом на выходе сравнивающего устройства 31 появится сигнал . коррекции, обеспечивающий поворот ведомой машины до прихода системы в равновесие по разности кур
совых углов 0-v. При отклонении ведомой машины от начального курса на выходе амплитудного детектора 22 возникает сигнал,
отличный от начального, записанного в запоминающем устройстве, на величину, пропорциональную приращению Дв. При этом на выходе сравнивающего устройства 32 появляется сигнал коррекции, обеспечивающий поворот ведомой мащины до прихода системы в равновесие по углу v. Так как координаты в и X взаимосвязаны, а смещение ведомой машины вправо или влево относительно ведущей и отклонение по курсовому углу корректируется включением бортовых фрикционов и тормозов, то
объединены схемы сравнения 31 и 32 по выходам. При остановке ведомой машины сначала передается команда «Ручное управление, а затем команды «Муфта, «Реверс, «Выключить тормоза и т. д., в зависимости от необходимости.
Таким образом, повышается надежность, точность и быстродействие системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для группового вождения самоходных сельскохозяйственных машин | 1987 |
|
SU1531874A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1984 |
|
SU1192658A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1985 |
|
SU1301332A2 |
| Посадочный радиолокатор | 2019 |
|
RU2721785C1 |
| ФАЗОВЫЙ РАДИОПЕЛЕНГАТОР | 2009 |
|
RU2403582C1 |
| КВАЗИМОНОИМПУЛЬСНЫЙ ВТОРИЧНЫЙ РАДИОЛОКАТОР | 2016 |
|
RU2622399C1 |
| Устройство для определения амплитудно-фазовых характеристик системы регулирования | 1978 |
|
SU930268A1 |
| Система для группового вожденияСАМОХОдНыХ СЕльСКОХОзяйСТВЕННыХМАшиН | 1979 |
|
SU818518A1 |
| Система для группового вождения самоходных сельскохозяйственных машин | 1981 |
|
SU969187A2 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ НЕОДНОРОДНОСТЕЙ В МАССИВАХ ГОРНЫХ ПОРОД | 1973 |
|
SU397877A1 |
СИСТЕМА ДЛЯ ГРУППОВОГО ВОЖДЕНИЯ САМОХОДНЫХ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МАШИН, содержащая установленный на ведущей машине передатчик системы ориентации с двумя передающими рамочными взаимно перпендикулярными антеннами, а на ведомой машине - воспринимающие элементы, имеющие взаимно перпендикулярные приемные рамочные антенны и приемник с четвертьволновым вибратором, и устройство преобразования сигналов в координаты, содержащее первый и второй делители напряжения, фильтр и фазовый детектор, отличающаяся тем, что, с целью повыщения точности, надежности и быcтpoдeйctвия управления, она снабжена на ведомой машине девяностоградусным фазовращателем, модулятором и передатчиком команд управления с четвертьволновым вибратором, а на ведущей машине - девяностоградусным фазовращателем, первым, вторым и третьим сумматорами, первым и вторым амплитудными детекторами, первым и вторым ограничителями и логическим автоматом, при этом выход передатчика системы ориентации связан с одной из рамочных передающих антенн непосредственно, а с другой - через девяностоградусный фазовращатель и с четвертьволновым вибратором - через модулятор и передатчик команд управления, одна из приемных рамочных антенн непосредственно подк тючена к бходу первого делителя напряжения и первому входу первого сумматора, второй вход которого об1 едипен с аз вторым входом второго сумматора и входом второго делителя напряжения и через де(Л вяностоградусный фазовращатель связан с второй приемной антенной, первые входы с: второго и третьего сумматоров объединены и подключены к выходу первого делителя напряжения, второй вход третьего сумматора соединен с выходом второго делителя напряжения, а его выход - с входом второго амплитудного детектора, выход со ел которого подключен к первому входу логического автомата, с вторым входом которого через первый амплитудный детектор связан выход второго сумматора, при этом выход первого сумматора через ограничисо тель подан на первый вход фазового детектора, второй вход которого через ограничитель и фильтр связан с приемником, причем выход фазового детектора соединен с третьим входом логического автомата.
,/5
| Система для группового вожденияСАМОХОдНыХ СЕльСКОХОзяйСТВЕННыХМАшиН | 1979 |
|
SU818518A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
