Ь
сд
со
го
о
GO
со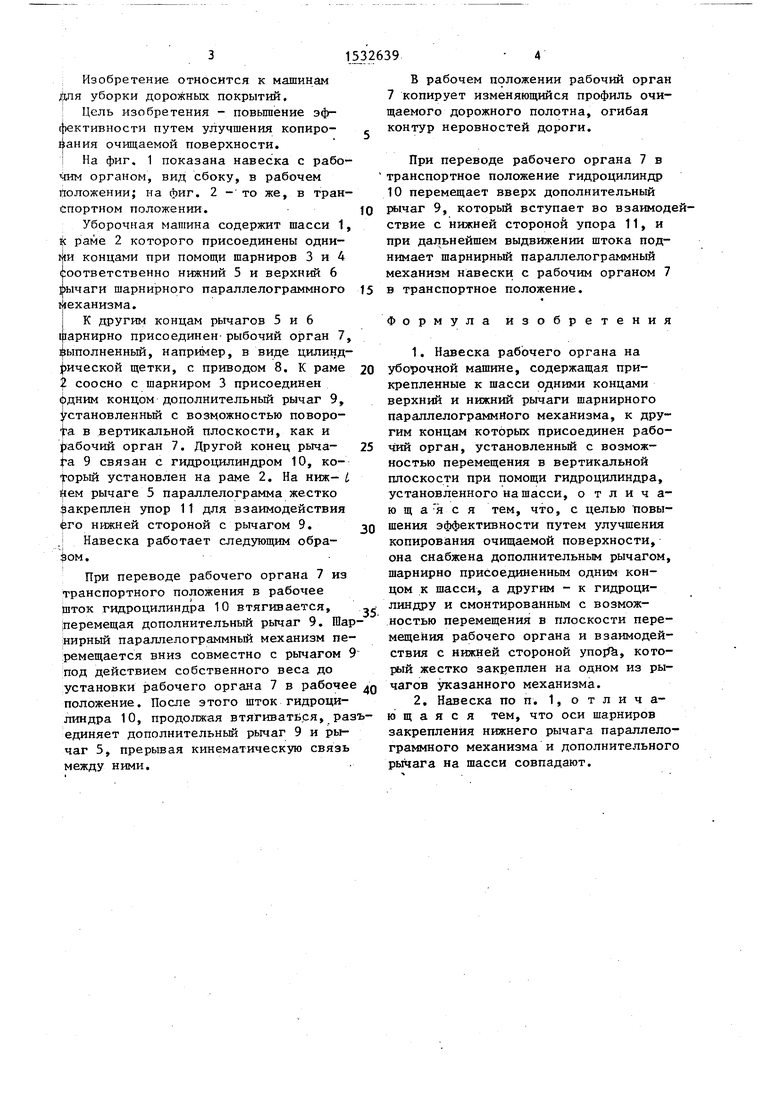
| название | год | авторы | номер документа |
|---|---|---|---|
| ГОРОДСКОЙ ПЫЛЕПОДБОРЩИК | 1994 |
|
RU2090691C1 |
| Машина подметально-уборочная прицепная | 2015 |
|
RU2616382C1 |
| МЕХАНИЗМ ПОВОРОТА РАБОЧЕГО ОРГАНА ДОРОЖНО-УБОРОЧНОЙ МАШИНЫ | 2001 |
|
RU2204647C1 |
| Устройство для блоков навески аппаратов уборочной машины | 1989 |
|
SU1657096A1 |
| МЕХАНИЗМ НАВЕСКИ РАБОЧЕГО ОРГАНА ДОРОЖНО-УБОРОЧНОЙ МАШИНЫ | 2001 |
|
RU2204645C1 |
| Широкозахватная толкающая волокуша | 1986 |
|
SU1344280A1 |
| Устройство для сбора мусора с проезжей части улично-дорожной сети населённых пунктов | 2021 |
|
RU2757688C1 |
| Подметально-уборочная машина | 2021 |
|
RU2765998C1 |
| Подметально-уборочная машина | 1984 |
|
SU1249096A1 |
| Сельскохозяйственный агрегат | 1988 |
|
SU1766308A1 |

Изобретение относится к машинам для уборки дорожных покрытий. Цель изобретения - повышение эффективности путем улучшения копирования очищаемой поверхности. Навеска рабочего органа уборочной машины содержит рабочий орган 7, установленный на шасси 1 при помощи шарнирного параллелограмма. С нижним рычагом 5 параллелограмма взаимодействует дополнительный рычаг 9, приводимый гидроцилиндром 10. В опущенном положении рабочий орган 7 свободно опирается на очищаемую поверхность, поскольку отсутствует кинематическая связь рычагов 5 и 9. В транспортном положении рабочий орган 7 удерживается поднятым рычагом 9. 1 з.п. ф-лы, 2 ил.
Фиг.1
Изобретение относится к машинам $ля уборки дорожных покрытий.
Цель изобретения - повышение эффективности путем улучшения копирования очищаемой поверхности.
На фиг. 1 показана навеска с рабочим органом, вид сбоку, в рабочем положении; на фиг. 2 - то же, в транспортном положении.
Уборочная машина содержит шасси 1, к раме 2 которого присоединены одними концами при помощи шарниров 3 и 4 соответственно нижний 5 и верхний 6 рычаги шарнирного параллелограммного механизма.
К другим концам рычагов 5 и 6 парнирно присоединен рыбочий орган 7, пыполненный, например, в виде цилинд- Ьической щетки, с приводом 8. К раме 2 соосно с шарниром 3 присоединен Адним концом дополнительный рычаг 9, установленный с возможностью поворо- в вертикальной плоскости, как и рабочий орган 7. Другой конец рьгча- а 9 связан с гидроцилиндром 10, ко- установлен на раме 2. На ниж- L нем рычаге 5 параллелограмма жестко Закреплен упор 11 для взаимодействия Јго нижней стороной с рычагом 9.
Навеска работает следующим обра- Јом.
При переводе рабочего органа 7 из транспортного положения в рабочее Шток гидроцилиндра 10 втягивается, перемещая дополнительный рычаг 9. Шарнирный параллелограммный механизм перемещается вниз совместно с рычагом 9 под действием собственного веса до установки рабочего органа 7 в рабочее положение. После этого шток гидроцилиндра 10, продолжая втягиваться, разединяет дополнительный рычаг 9 и рычаг 5, прерывая кинематическую связь между ними.
0
5
0
д5
0
35
В рабочем положении рабочий орган 7 копирует изменяющийся профиль очищаемого дорожного полотна, огибая контур неровностей дороги.
При переводе рабочего органа 7 в транспортное положение гидроцилиндр 10 перемещает вверх дополнительный рычаг 9, который вступает во взаимодействие с нижней стороной упора 11, и при дальнейшем выдвижении штока поднимает шарнирный параллелограммный механизм навески с рабочим органом 7 в транспортное положение.
Формула изобретения
Фиг. 2
| Способ контроля поверхности параболического отражателя | 1987 |
|
SU1545269A1 |
| F,2K, 1979. | |||
