/
-i -j
да
держит модель 1 обтекаемого тела, блок регистрации 2, измерительные и контролирующие датчики 3, генератор
4ультразвуковой частоты, усилители
5и 6, блок моделирования среды 7
и блок моделирования водной среды и
поверхности раздела двух сред 9. Поставленная цель достигается за счет выполнения блока моделирования среды в виде плоской катушки индуктивности, а блока моделирования 9 в виде плоской гибкой рамки. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования обтекания тел вблизи волновой поверхности | 1978 |
|
SU665306A1 |
| Устройство для моделирования обтекания транспортных средств | 1985 |
|
SU1285498A1 |
| Устройство для моделирования обтекания водой самоходного плавсредства | 1988 |
|
SU1562943A1 |
| Устройство для моделирования обтекания водой самоходного плавсредства | 1989 |
|
SU1735874A2 |
| Устройство для моделирования обтекания водой кабеля буксируемой океанографической системы | 1986 |
|
SU1316014A1 |
| Устройство для электромагнитного моделирования физических полей | 1978 |
|
SU748449A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ТРЕХМЕРНЫХ ПОСТУПАТЕЛЬНО-ЦИРКУЛЯЦИОННЫХ ПОТОКОВ | 1971 |
|
SU305487A1 |
| Устройство для моделирования обтекания водой кабеля буксируемой океанографической системы | 1988 |
|
SU1614022A2 |
| Устройство для моделирования потока жидкости и газа | 1985 |
|
SU1251115A1 |
| Модель плоского профильного тела | 1990 |
|
SU1824135A1 |
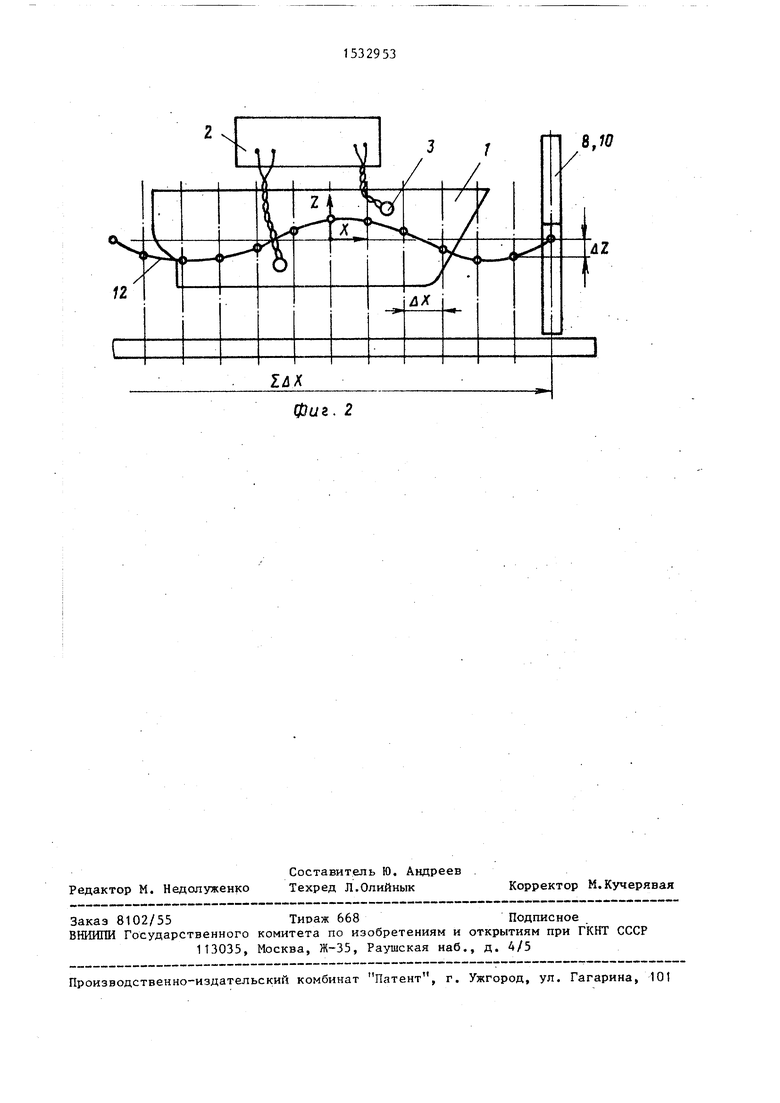
Изобретение относится к средствам аналоговой вычислительной техники и предназначено для моделирования поля скоростей при движении водоизмещающего транспортного средства. Целью изобретения является расширение функциональных возможностей за счет моделирования обтекания тела на границе раздела двух сред. Устройство содержит модель 1 обтекаемого тела, блок регистрации 2, измерительные и контролирующие датчики 3, генератор 4 ультразвуковой частоты, усилители 5 и 6, блок 7 моделирования среды и блок 9 моделирования водной среды и поверхности раздела двух сред. Поставленная цель достигается за счет выполнения блока моделирования среды в виде плоской катушки индуктивности, а блока моделирования 9-в виде плоской гибкой рамки. 2 ил.
Устройство относится к средствам налоговой вычислительной техники и Предназначено для моделирования на основе электромагнитогидродинамичес- Кой аналогии (ЭМГА) вызванного поля скоростей при движении водоизмещаю- щего судна или другого транспортного средства.
Цель изобретения - расширение функциональных возможностей за счет моделирования обтекания тела на границе раздела двух сред.
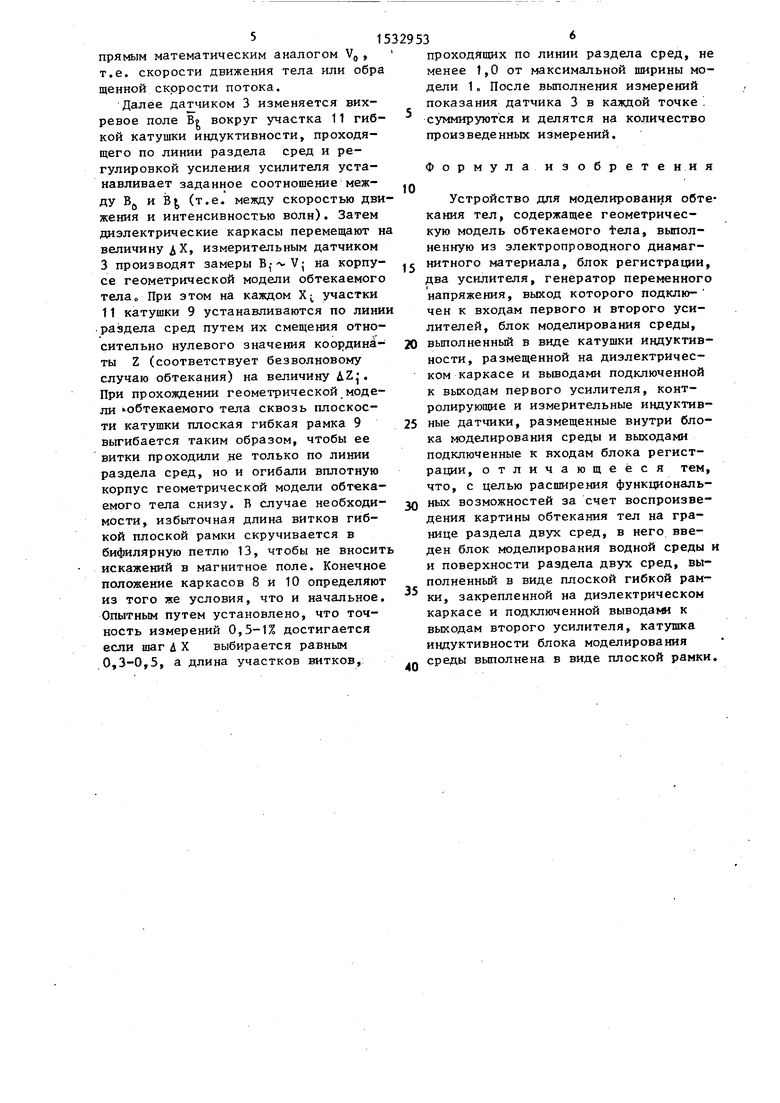
На фиг. 1 показана конструкция устройства; на фиг. 2 - схема работы устройства.
Устройство содержит геометрическую модель 1 обтекаемого тела (например, корпус водоизмещенного судна) блок регистрации 2 с присоединенными измерительными и контролирующими датчиками 3, генератор 4 ультразвуковой частоты, к выходу которого подключены усилитель 5 и 6. К выходам усилителя 5 подключен ,блок 7 моделирования среды, выполненный в виде плоскостей катушки индуктивности, содержащий один или несколько витков и закрепленный на жестком диэлектрическом каркасе 8. Блок 9 моделирования водной среды и границы раздела двух сред выполнен в виде плоской гибкой рамки, также состоящей из одного или несколтэких витков. Рамка закреплена на трансформируемом, диэлектрическом каркасе 10. Выводы рамки 9 подключены к выходам усилителя 6.
Катушку индуктивности блока моделирования среды располагают в плоскости, перпендикулярной направлению движения модели обтекаемого тела (плоскости У02). Диэлектрический каркас, на котором закреплена указанная катушка индуктивности для удобства пользования устройством, может быть установлен на координатном механизме конструкция которого зависит от конкретного использования. Координатный механизм должен обеспечивать установ5
0
5
0
5
0
5
0
5
ку катушки индуктивности блока моделирования среды в фиксированных положениях по оси ОХ.
Блок моделирования водной среды и поверхности раздела двух сред устанавливается внутри блока моделирования среды. При этом конструкция каркасов и технические связи между ними должны обеспечивать возможность поворота плоской гибкой рамки в плоскостях ХОУ и УОЕ с фиксацией заданного положения. Каркас,на котором крепится плоская гибкая рамка, должен позволять устанавливать участки 11 рамки по линии раздела сред 12 и по поверхности модели обтекаемость тела.
Устройство работает следующим образом.
Гибкая плоская рамка 9 устанавливается относительно катушки индуктивности с заданными углами в плоскостях ZOy и ХОУ (в случае, когда направление движения судна и набегающей волны совпадают, эти углы равны нулю). При этом ее витки выгибаются и закрепляются на каркасе 10 таким образом, чтобы пройти по линии раздела сред. Задается шаг ДХ смещения каркасов с катушками (или шаг перемещения модели) и графически или иным путем для каждого значения Xj определяется значения AZ,1, т.е. вертикальная координата поверхности раздела относительно нулевой координаты, за которую принята координата поверхности раздела сред при отсутствии волн.
Первоначально модель обтекаемого тела располагается на таком расстоянии от каркасов, когда величина ин- дукции магнитного поля, измеряемая датчиком 3, не превышает установленной погрешности. Датчик 3 устанавливается в плоскости катушки индуктивности 7 так, чтобы его ось была параллельна к плоскости катушки 7 индуктивности, и производится замер значения В0, которое является |
прямым математическим аналогом V.
т.е. скорости движения тела или обра щенной скррости потока.
Далее датчиком 3 изменяется вихревое поле В вокруг участка 11 гибкой катушки индуктивности, проходящего по линии раздела сред и регулировкой усиления усилителя устанавливает заданное соотношение между Вй и В (т.е. между скоростью движения и интенсивностью волн). Затем диэлектрические каркасы перемещают н величину ДХ, измерительным датчиком 3 производят замеры на корпусе геометрической модели обтекаемого тела При этом на каждом Х участки 11 катушки 9 устанавливаются по линии .раздела сред путем их смещения относительно нулевого значения координаты Z (соответствует безволновому случаю обтекания) на величину iZj. При прохождении геометрической модели обтекаемого тела сквозь плоскости катушки плоская гибкая рамка 9 выгибается таким образом, чтобы ее витки проходили не только по линии раздела сред, но и огибали вплотную корпус геометрической модели обтекаемого тела снизу. В случае необходимости, избыточная длина витков гибкой плоской рамки скручивается в бифилярную петлю 13, чтобы не вносить искажений в магнитное поле. Конечное положение каркасов 8 и 10 определяют из того же условия, что и начальное. Опытным путем установлено, что точность измерений 0,5-1% достигается если шаг Д X выбирается равным 0,3-0,5, а длина участков витков,
29536
проходящих по линии раздела сред, не
менее 1,0 от максимальной ширины модели 1 о После выполнения измерений показания датчика 3 в каждой точке . суммируются и делятся на количество произведенных измерений.
Формула изобретения
Устройство для моделирования обтекания тел, содержащее геометрическую модель обтекаемого тела, выполненную из электропроводного диамагнитного материала, блок регистрации, два усилителя, генератор переменного напряжения, выход которого подклю- чен к входам первого и второго усилителей, блок моделирования среды,
выполненный в виде катушки индуктивности, размещенной на диэлектрическом каркасе и выводами подключенной к выходам первого усилителя, контролирующие и измерительные индуктивные датчики, размещенные внутри блока моделирования среды и выходами подключенные к входам блока регистрации, отличающееся тем, что, с целью расширения функциональных возможностей за счет воспроизведения картины обтекания тел на границе раздела двух сред, в него введен блок моделирования водной среды и и поверхности раздела двух сред, выполненный в виде плоской гибкой рамки, закрепленной на диэлектрическом каркасе и подключенной выводами к выходам второго усилителя, катушка индуктивности блока моделирования
среды выполнена в виде плоской рамки.
S5
12
фиг. 2
| Устройство для моделирования обтекания тел вблизи волновой поверхности | 1978 |
|
SU665306A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для моделирования обтекания транспортных средств | 1985 |
|
SU1285498A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
