Изобретение относится к аналоговой вычислительной технике и может быть использовано для моделирования обтекания водой самоходных плавсредств, в частности судов-катамараново
Цель изобретения - повышение точности моделирования гидродинамического поля судна-катамарана.
На фиг,1 приведена схема устройства; на фиг.2 - блок моделирования глубины погружения судна-катамарана.
Устройство содержит блок 1 моделирования объема судна-катамарана, выполненный в виде катушек 2 и 3 индуктивности, блок 4 моделирования объема ускоренного потока между корпусами судна-катамарана, выполненный в виде катушки 5 индуктивности, блок 6 моделирования гребных винтов, вы- -полненный в виде соленоидов 7 и 8, источник 9 переменного напряжения.
блок 10 моделирования коэффициента гидродинамического давления, включающий виток 11 из электропроводящего материала, электромагнитно связанный с задающим индукционным датчиком 12, измерительный элемент 13, блок 14 регистрации и блок моделирования глубины погружения судна-катамарана, состоящий из плоского диэлектрического основания 15, вертикальных направляющих стоек 16 - 20 и горизонтальной направляющей планки 21,
Модели корпусов судна-катамарана выполнены в виде обмоток катушек 2 и 3 индуктивности, нанесенных на диэлектрические каркасы. Для моделирования ускорения потока между корпусами судна-катамарана применена третья катушка 5 индуктивности, расположенная между катушками 2 и 3. Все обмотки катушек 2, 5 и 3 распо(Л
С
локены соответственно на вертикальных направляющих стойках 16 - 18, причем расстояние между обмотками и их линейные размеры пропорциональны моделируемым величинам Обмотки соленоидов 7 и 8 имеют переменный шаг намотки витков, уменьшающийся в направлении от обмоток катушек 2 и 3 к концу, пропорционально коэффициенту попутного потока судна-катамарана. Обмотки соленоидов 7 и 8 расположены соответственно на стойках 20 и 19. Обмотки катушек 2,3 и 5 и соленоидов 7 и 8 включены между собой и в цепь источника 9 последовательно. При последовательном соединении обмоток катушек 2,5 и 3 обмотка катушки 5 имеет направление, противоположное направлению обмоток катушек 2 и 3, пдскхшьку в моделируемом процессе гидродинамические поля давлений корпусов судна-катамарана должны складываться. Аналогично направление обмоток соденоидов 7 и 8 про- тивоположно направлению намотки в обмотках катушек 2,5 и 3„ Измерительный элемент 13 расположен на ползуне 22 с закрепленным карандашом 23,
Устройство работает следующим об- разом
Обмотки катушек 2,3 и 5 и соленоидов 7 и 8 модели обтекаемого тела устанавливают на направляющих сТойках 16 - 20 на расстоянии h по вертикали от измерительного элемента 3„ Величина h в масштабе соответствует глубине места, в котором необходимо определить картину обтекания. На обмотки катушек 2,3 и 5 и со- леноидов 7 и 8 и виток 11 подается переменное электрическое напряжение от источника 9. При прохождении переменного электрического тока по обмоткам катушек 2, 3 и 5 и соленоидам 7 и 8 вокруг них создается переменное магнитное поле, имитирующее, согласно магнитогидродинамической аналогии, гидродинамическое поле скоростей W, вызванное набегающим потоком при обтекании корпусов судна-катамарана при работе его гребных вин- то В о
Измерительный элемент 13 устанавливают по направлению движения V, поскольку величина гидродинамического поля давлений ДР определяется, В основном, через величину продольной
составляющей W вызванной скорости W по формуле
,
ДР
где р - плотность воды;
V - скорость движения судна-катамарана.
Перемещая на ползуне 22 измерительный элемент 13 по планке 21 в блоке 14 добиваются компенсации наведенных ЭДС в датчике 12 и измерительном элементе 13 и при помощи карандаша 23 ставят точку. Затем сдвигают планку 21 и снова перемещением элемента 13 компесируют наведенные ЭДС. Так поступают, пока на миллиметровой бумаге, расположенной на основании 15, не получают ряд точек, по которым строят кривую равных давлений.
Затем изменяют высоту h и все операции повторяют„ Получают новую кривую равных давлений на другой глубине.
Для получения семейства кривых равного давления (с разными значениями), изменяя положение датчика 12 относительно витка 11, задают новые значения напряженности магнитного поля и строят новые изобары0
В результате моделирования получают совокупность изобар, характеризующих гидродинамическое поле судов- катамаранов.
Формула изобретения
Устройство для моделирования текания водой самоходного плавсредства, содержащее блок регистрации, блок моделирования гребного винта, выполненный в виде первого соленоида, источник переменного напряжения, первый выход которого подключен к первому выводу первого соленоида, измерительного элемента, первый вывод которого подключен к первому вхо- ду блока регистрации, блок моделирования объема самоходного плавсредства, выполненный в виде первой и второй катушек индуктивности, расположенных соответственно на первом и втором диэлектрических каркасах, блок моделирования глубины погружения самоходного плавсредства, состоящий из плоского диэлектрического основания, трех диэлектрических направляющих стоек и диэлектрической горизон - тальной планки, жестко закрепленной на диэлектрическом основании, блок моделирования коэффициента гидродинамического давления, включающий виток из электропроводящего материала и задающий индукционный датчик, которые связаны между собой индуктивно, причем в блоке моделирования глубины погружения самоходного плавсредства три диэлектрические направляющие стойки расположены перпендикулярно плоскому диэлектрическому основанию и жестко закреплены на нем, при этом вторая и третья диэлектрические направляющие стойки расположены на оси, паралльной длине плоского диэлектрического основания, первый и второй выводы индукционного датчика подключены соответственно к второму входу блока регистрации и второму выводу измерительного элемента, установленного с возможностью перемерой катушки индуктивности, первый вывод виткя из электропроводящего материала блока моделирования коэффициента гидродинамического давления подключен к второму выходу источника переменного напряжения, отличающееся тем, что, с целью повышения точности моделирования гидродинамического поля судна-катамарана, оно дополнительно содержит четвертую и пятую диэлектрические направляющие стойки, третью катушку индуктивности, расположенную на диэлектрическом кар5 касе, установленном между первым и вторым диэлектрическими каркасами на четвертой диэлектрической направляю-, щей стойке, расположенной на одной оси с первой и второй диэлектрически0 ми направляющими стойками, и второй соленоид, установленный на пятой вертикальной направляющей стойке, причем ось, на которой расположены первая и пятая диэлектрические направляющие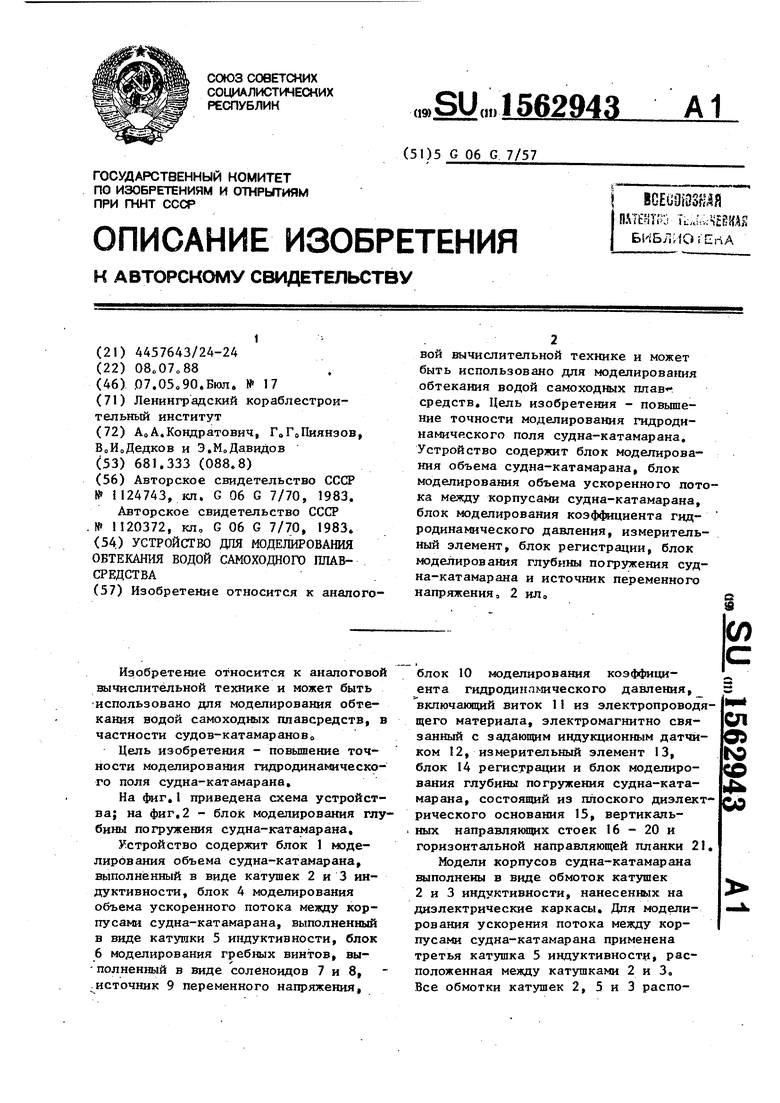

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования обтекания водой самоходного плавсредства | 1989 |
|
SU1735874A2 |
| Устройство для моделирования обтекания транспортных средств с реактивными движителями | 1987 |
|
SU1509953A1 |
| Устройство для моделирования обтекания транспортных средств с реактивными движителями | 1990 |
|
SU1714629A2 |
| Устройство для изучения гидродинамического поля деталей орудия лова | 1990 |
|
SU1808279A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОГО ПОЛЯ ПОДВОДНОГО ТРАНСПОРТНОГО ПЛАВСРЕДСТВА | 1995 |
|
RU2080654C1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО МОДЕЛИРОВАНИЯ ГИДРОДИНАМИЧЕСКОГО ПОЛЯ ПОДВОДНОГО ТЕЛА | 1991 |
|
RU2015939C1 |
| Устройство для моделирования обтекания транспортных средств | 1985 |
|
SU1285498A1 |
| Устройство для моделирования обтекания водой кабеля буксируемой океанографической системы | 1986 |
|
SU1316014A1 |
| Модель рыболовного орудия в соответствии с магнитогидродинамической аналогией | 1988 |
|
SU1539822A1 |
| Способ бесконтактного измерения зольности водоугольного топлива | 2023 |
|
RU2829011C1 |


Изобретение относится к аналоговой вычислительной технике и может быть использовано для моделирования обтекания водой самоходных плавсредств. Цель изобретения - повышение точности моделирования гидродинамического поля судна-катамарана. Устройство содержит блок моделирования объема судна-катамарана, блок моделирования коэффициента гидродинамического давления, измерительный элемент, блок регистрации, блок моделирования глубины погружения судна-катамарана и источник переменного напряжения. 2 ил.
щения на горизонтальной направляющей 25 стойки, параллельна оси, на которой планке параллельной оси, на которой расположены вторая и третья диэлектрические напраапяющие стойки, причем измерительный индукционный датчик электромагнитно связан с первой и второй катушками индуктивности, установленными соответственно на первой и второй диэлектрических направляющих стойках с возможностью передвижения вдоль них, на третьей диэлектрической направляющей стойке установлен первый соленоид, второй вывод ко- торого подключен к первому выводу вторасположены вторая и третья вертикал ные направляющие стойки, вывод второ катушки индуктивности соединен через третью катушку индуктивности, второй
30 соленоид и первую катушку индуктивности с вторым выводом витка из элек ропроводящего материала, при этом четвертая и пятая диэлектрические направляющие стойки жестко закреплен
,с перпендикулярно основанию катушки ин дуктивности и соленоиды расположены в одной плоскости, параллельной диэлектрическому основанию,,
стойки, параллельна оси, на которой
расположены вторая и третья вертикальные направляющие стойки, вывод второй катушки индуктивности соединен через третью катушку индуктивности, второй
соленоид и первую катушку индуктивности с вторым выводом витка из электропроводящего материала, при этом четвертая и пятая диэлектрические направляющие стойки жестко закреплены
перпендикулярно основанию катушки ин- дуктивности и соленоиды расположены в одной плоскости, параллельной диэлектрическому основанию,,
Фиг
/5,n,fe
ID
| Авторское свидетельство СССР К 1124743, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Авторское свидетельство СССР | |||
| Анализатор мореходных качеств судна | 1983 |
|
SU1120372A1 |
