1П
Изобретение относится к аналоговой вычислительной технике и может быть использовано для моделирования обтекания элементов буксируемых океанографических систем.
Целью изобретения является повышение точности и производительности при исследовании форм петли кабеля и ее характеристик магнитного поля. На фиг.1 представлена блок-схема устройства; на фиг.2 - конструкция блока 1; на фиг.З - петля кабеля буксируемой океанографической системы.
Устройство содержит блок 1 моделирования внешних воздействий, состоящий из гибкой металлической петли 2 и диэлектрического каркаса 3, диэлектрические шарики 4, диэлектрические блоки 7 и 8, нити 9 и 10, грузы 11 - 14, диэлектрическую планку 15, ползуны 16 - 18, нити 19 и 20, диэлектрические кольца 21 и 22, вертикальную рейку 23, кронштейн 24, ползуны 25 и 26, карандаш 27, блок 2 моделирования характеристик магнитного поля кабеля, состоящий из металлического кольца 29 и задающего индукционного датчика, выполненного в виде катушки 30 индуктивности, измерительный инду; ционный датчик, выполненный в виде катушки 31 индуктивности, блок 32 регистрации, генератор 33 переменного напряжения.
Устройство работает следующим образом.
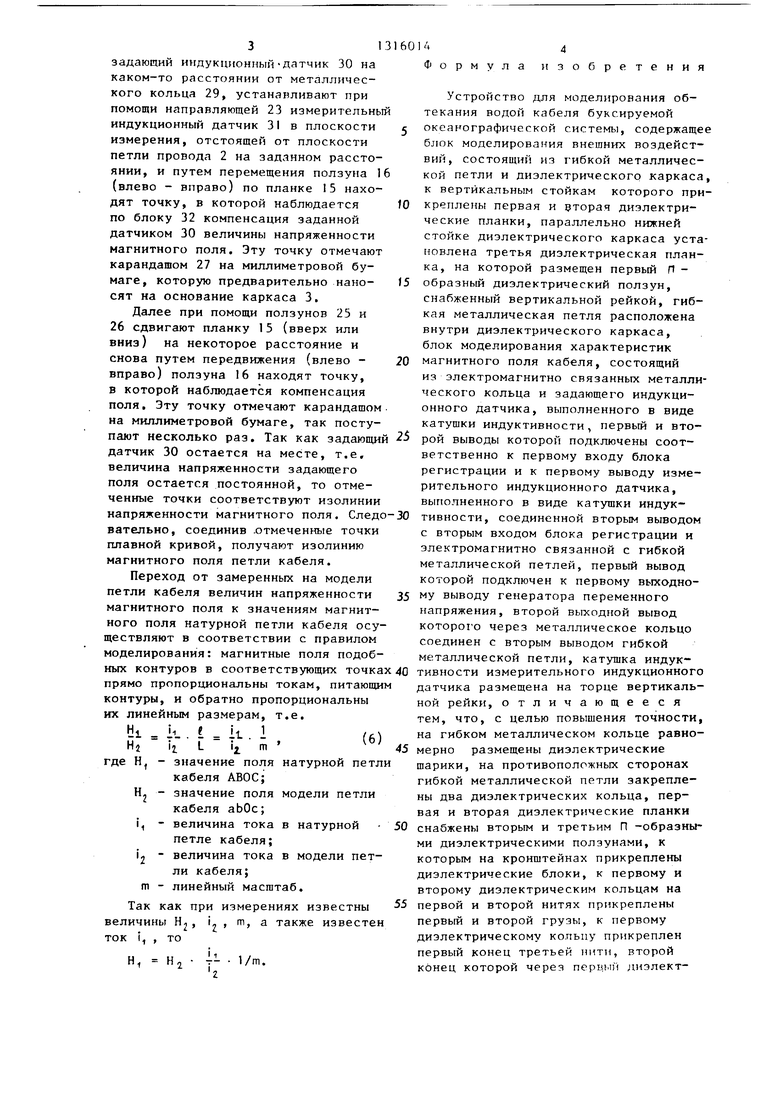
Прежде чем приступить к работе устанавливают линейный и силовой масштабы моделирования, рассматривая уравнения катенарной К1 Ивой ВОС (l) и цепной линии ЬОс (2) с началом координат в точках О (фиг.З и 1):
I / , А Г -
p(ch--- - 1); ,);
(1)
(2)
где Т - натяжение вдоль буксируемого кабеля ВОС; г - погонное гидродинамическое сопротивление сопротивление буксируемого кабеля, обтекаемого потоком жидкости со скоростью и под углом 90°; X и Y - координаты буксируемого кабеля ВОС, принимающего при буксировке со скоростью U форму кате- нариой кривой (1) с началом координат в точке О (Б этом случае весом буксируемого кабеля - иоде пренебрегают);
t - горияонталт.ная составляющая натяжения цепочки ЬОс, образованной гибким проводом с расположенными на нем грузиками; - погонная масса цепочки; х и у - координаты цепочки, принимающей в поле силы тяжести форму цепной линии с началом координат в точке 0.
Из выражений (1) и (2) следует, что форма буксируемого кабеля ВОС подобна форме цепочки ЬОс, если выполняются условия
5
0
5
0
5
0 5
tx т t « Г
7 г г г
(3)
с)
(5)
X Y f 1
X Y L т где Р и L - длина цепочки ЬОс и буксируемого кабеля ВОС; m - линейный масштаб.
Следует отметить, что условие (З) соблюдается и для приложенных к буксируемому кабелю сил, например, от- .водящего аппарата:
Bi Г „ BI - Г
Р, - г Рг гКроме того, это справедливо и для отрезков кабеля АВ и АС, т.е. в потоке жидкости они также принимают форму катенарной кривой (1) и их моду- лируют также цепочками аЬ и ас,
В соответствии с выбранным линейным масштабом ml, L, берут гибкий провод 2 с грузиками 4 с любой погонной массой (при этом диэлектрические грузики могут быть нанизаны или привязаны). Затем согласно (З) и (З) расчитывают вес грузиков р, и р по заданным величинам Т,г, Р, Р, fСобирают узлы устройства согласно фиг.1 и 2. Кольца 21 и 22, грузы р и р подвешивают при помощи быст- росъемных элементов (например, крючков). Так как грузы имитируют горизонтальную составляющую сил Р отводящих аппаратов, то, перемещая ползуны 17 и 18 но направляющим стойкам 5 и 6 с блоками 7 и 8, располагают нити 9 и 10 горизонтально. В этом случае гибкий провод 2 (аЬОс) с грузиками 4 принимает форму буксируемой, петли кабеля АВОС.
Для определе}1ия характеристик магнитного поля полученной петли кабеля запитынают г ибкий провод 2 переменным током i от ис.точника 33 переменного напряжения (например, звукового г еиоплгора) , размещают
313
задающий индукционный-датчик 30 на каком-то расстоянии от металлического кольца 29, устанавливают при помощи направляющей 23 измерительньш индукционный датчик 31 в плоскости измерения, отстоящей от плоскости петли провода 2 на заданном расстоянии, и путем перемещения ползуна 16 (влево - вправо) по планке 15 находят точку, в которой наблюдается по блоку 32 компенсация заданной датчиком 30 величины напряженности магнитного поля. Эту точку отмечают карандашом 27 на миллиметровой бумаге, которую предварительно нано- сят на основание каркаса 3,
Далее при помощи ползунов 25 и 26 сдвигают планку 15 (вверх или вниз) на некоторое расстояние и снова путем передвижения (влево - вправо) ползуна 16 находят точку, в которой наблюдается компенсация поля. Эту точку отмечают карандашом иа миллиметровой бумаге, так поступают несколько раз. Так как задающий датчик 30 остается на мес:те, т.е. величина напряженности задающего поля остается постоянной, то отмеченные точки соответствуют изолинии напряженности магнитного поля. Следо вательио, соединив .отмеченные точки плавной кривой, получают изолинию магнитного поля петли кабеля.
Переход от замеренных на модели петли кабеля величин напряженности магнитного поля к значениям магнитного поля натурной петли кабеля осуществляют в соответствии с правилом моделирования: магнитные поля подобных контуров в соответствующих точка прямо пропорциональны токам, питающи контуры, и обратно пропорциональны их линейным размерам, т.е.
HI
il . I
(6)
ii t
Hi TI L ii m 45 де H, - значение поля натурной петли
кабеля АВОС; Н. - значение поля модели петли
кабеля аЬОс; i, - величина тока в натурной - 50
петле кабеля;
2 величина тока в модели петли кабеля; m - линейный масштаб.
Так как при измерениях известны еличины Н2 , j i з также известен
ток I,
то
HI - г
4 1/т.
160
с fOf5
20 . -30
35 х 40 м
45 и
50
1Д4
Формула изобретения
Устройство для моделирования обтекания водой кабеля буксируемой океанографической системы, содержащее блок моделирования внешних воздействий, состоящий из гибкой металлической петли и диэлектрического каркаса, к вертикальным стойкам которого прикреплены первая и торач диэлектрические планки, параллельно нижней стойке диэлектрического каркаса установлена третья диэлектрическая планка, на которой размещен первый П - образный диэлектрический ползун, снабженный вертикальной рейкой, гибкая металлическая петля расположена внутри диэлектрического каркаса, блок моделирования характеристик магнитного поля кабеля, состоящий из электромагнитно связанных металлического кольца и задающего индукционного датчика, выполненного в виде катушки индуктивности, первый и второй выводы которой подключены соответственно к первому входу блока регистрации и к первому выводу измерительного индукционного датчика, выполненного в виде катушки индуктивности, соединенной вторым выводом с вторым входом блока регистрации и электромагнитно связанной с гибкой металлической петлей, первый вывод которой подключен к первому выходному выводу генератора переменного напряжения, второй выходной вывод которого через металлическое кольцо соединен с вторым выводом гибкой металлической петли, катушка индуктивности измерительного индукционного датчика размещена на торце вертикальной рейки, отличающееся тем, что, с целью повышения точности, на гибком металлическом кольце равномерно размещены диэлектрические шарики, на противоположных сторонах гибкой металлической петли закреплены два диэлектрических кольца, первая и вторая диэлектрические планки снабжены вторым и третьим П -образными диэлектрическими ползунами, к которым на кронштейнах прикреплены диэлектрические блоки, к первому и второму диэлектрическим кольцам на первой и второй нитях прикреплены первый и второй грузы, к первому диэлектрическому кольну прикреплен первый конец третьей нити, второй конец которой через первый диэлект5131
рический блок соединен с третьим грузом, к второму диэлектрическому кольцу прикреплен первый конец четвертой нити, второй конец которой через второй диэлектрический блок соединен с четвертым грузом, первый и второй выводы гибкой металлической
60146
петли закреплены в верхней части диэлектрического каркаса, кон1Ц 1 третьей диэлектрической планки закреплены в третьем и четвертом П -образJ ных ползунах, расположенных соответственно на первой и второй диэлектрических планках.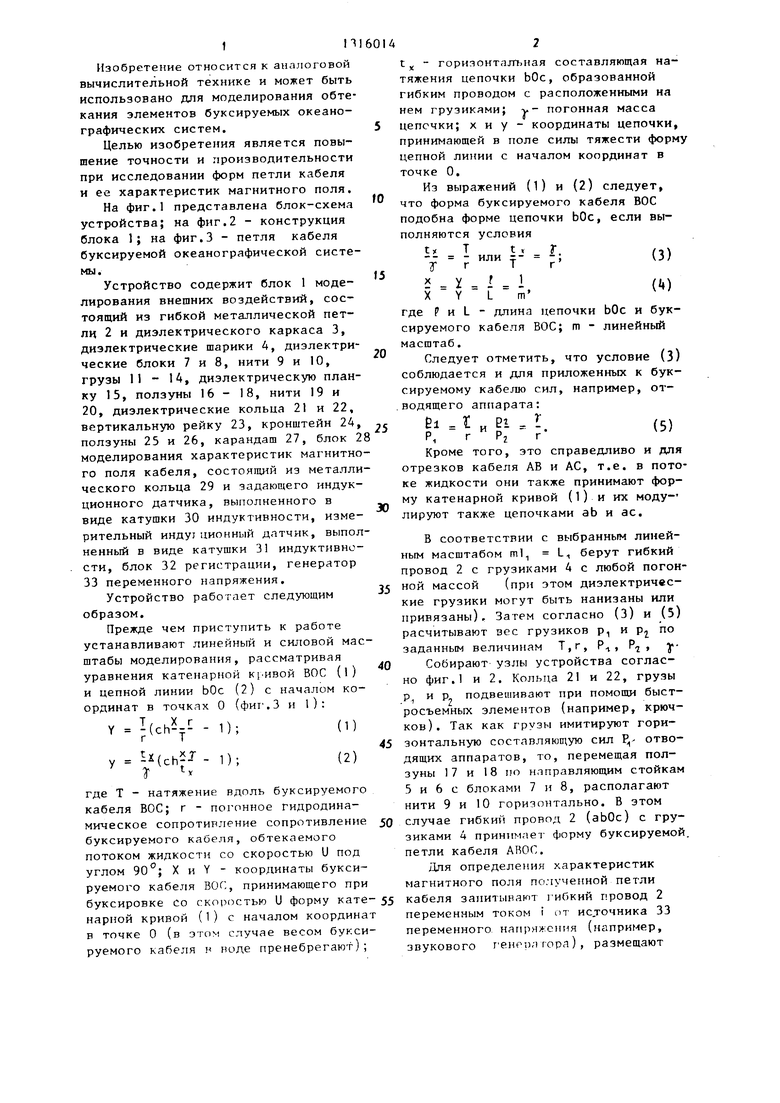
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования обтекания водой кабеля буксируемой океанографической системы | 1988 |
|
SU1614022A2 |
| Устройство для моделирования буксируемой системы | 1991 |
|
SU1833823A1 |
| Вычислительное устройство | 1985 |
|
SU1275475A1 |
| Устройство для моделирования обтекания водой самоходного плавсредства | 1989 |
|
SU1735874A2 |
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ ОРУДИЙ ПРОМЫШЛЕННОГО РЫБОЛОВСТВА МЕТОДОМ МЕХАНИЧЕСКИХ АНАЛОГИЙ | 1970 |
|
SU266303A1 |
| Устройство для моделирования обтекания водой самоходного плавсредства | 1988 |
|
SU1562943A1 |
| Чертежный прибор | 1984 |
|
SU1240635A1 |
| Модель плоского профильного тела | 1990 |
|
SU1824135A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ТРЕХМЕРНЫХ ПОСТУПАТЕЛЬНО-ЦИРКУЛЯЦИОННЫХ ПОТОКОВ | 1971 |
|
SU305487A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОБУЧЕНИЯ НАЧИНАЮЩИХ ТЯЖЕЛОАТЛЕТОВ | 2007 |
|
RU2365397C2 |
Изобретение относится к аналоговой вычислительной технике и может быть использовано для моделирования обтекания водой элементов буксируемых океанографических систем Целью изо- бретения являются повышение точности и производительнгостио Устройство содержит блок 1 моделирования внешних воздействий, гибкую металлическук- петлю 2, диэлектрический каркас 3, диэлектрические шарики 4, диэлектрические планки 5,6, диэлектрические блоки 7,8, нити 9,10, грузы 11,12, 13,14, диэлектрическую планку 15, ползуны 17,18, нити 19,20, диэлектрические кольца 21,22, вертикальную рейку 23, кронштейны 24, ползуны 25, 26, карандаш 27, блок моделирования характеристик магнитного поля кабеля, металлическое кольцо, катушки индуктивности, блок регистрации, генератор переменного напряжения Изобре- гение позволяет повысить точность и производительность устройства, 3 ил. о 9 (Л 00 а 26
JO
Pui I
Фи1 J
Составитель В.Рыбин Редактор Л. Лангазо Техред М.Ходанич
2366/53
Тираж 672Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Корректор М.Демчик
| Патент США № 3613629, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
