ел
со ел
Изобретение относится к горной технике н может бьггь использовано при управлении многочерпаковыми драгами.
Цель изобретения - повышение эффективности процесса драгирования и улучшение качества грохочения пород.
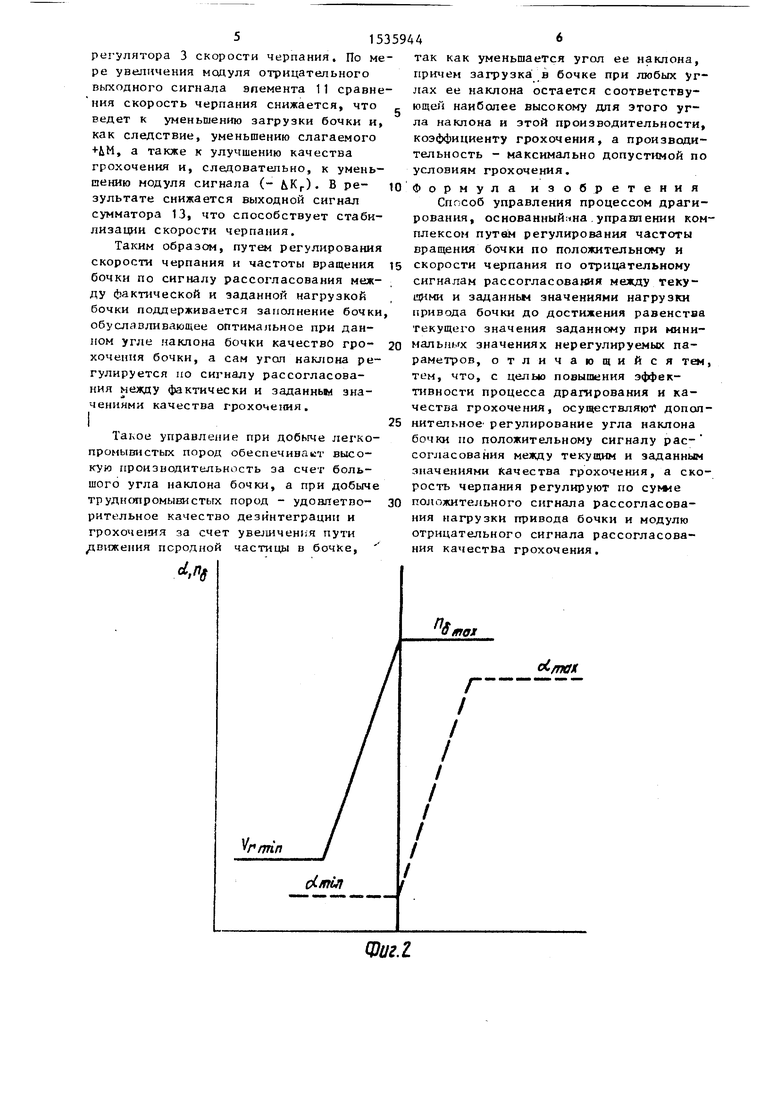
На фиг. 1 изображена блок-схема системы управления процессом драгиро,- вания для осуществления предложенного способа; на фиг. 2 - характеристики регуляторов угла наклона бочки и ее частоты вращения при использовании статических регуляторов.
Система включает черпаковую цепь 1, привод 2 черпаковой цепи, регулятор 3 привода черпаковой цепи, бочку 4, привод 5 бочки, регулятор 6 частоты вращения привода бочки, устройство 7 задания нагрузки привода бочки, устройство 8 измерения качества грохочения, регулятор 9 угла наклона бочки, элементы 10 и 11 сравнения, инвертор 12 и сумматор 13.
Горная масса из черпаковой цепи 1, приводимой в движение приводом 2, поступает с производительностью Q в бочку 4, вращаемую с помощью привода 5, задаваемая нагрузка бочки по сигналу ее частоты вращения ng формируется с помощью устройства 7 задания нагрузки.
Сигнал фактической нагрузки бочки М с помощью элемента 10 сравнения сравнивают с сигналом задания нагрузки бочки Mi(Ji, сформированным устройством 7. Положительный сигнал рассогласования с выхода элемента 10 сравнения подают на вход сумматора 13, выход с которого подают на вход регулятора 3 скорости черпания, а отрицательный сигнал рассогласования с выхода элемента 10 сравнения подают на вход регулятора 6 частоты вращения бочки. С помощью устройства 8 измнря ют качество грохочения. Выходной сигнал с этого устройства сравнивают с помощью элемента 11 сравнения с сигна лом задания качества грохочения.
Положительный сигнал рассогласования с выхода элемента 11 сравнения подают на вход регулятора 9 угла наклона бочки, а отрицательный - на вход инвертора 12. Сигнал с выхода инвертора 12 поступает на второй вход сумматора 13. Выходной сигнал с сумматора 13 подают на вход регулятора 6 чао тоты вращения бочки. Регуляторы 3 и 6 заполнены так, что при ностушк пни
0
5
0
5
30
зь
40
45
50
55
на их входы сигналов управления, они обеспечивают снижение скорости приводов .
Способ управления процессом драгирования с помощью данного -устройства осуществляется следующим образом.
При обрЧбОТке Jltl KOnpOMLIBUCTblX НОроц коэффициент грохочения выше заданного. Поэтому на вьсходе элемента 1I сравнения появляется положительный сигнал рассогласования, величина которого определяет величину угла наклона бочки. Чем выше этот сигнал, тем больше угол наклона бочки. При этом выходной сигнал сумматора 13 определяется только выходным сигналом элемента 10 сравнения. Поэтому регулирование скорости черпания и частоты вращения бочки осуществляется (как и в прототипе) по сигналу рассогласования междт фактической и задаваемой нагрузкой бочки.. При максимальном угпе пак- лоча бочки скорость перемещения породы ро процолмюй оси максимальна. Поэтому равенство фактической нагрузки бочки заданному значению обеспечивается при максимальной скорости черпания и М 1к 1гмлы:оГ производительности.
По мере ухудшения промЫвистости песков качество грохочения, измеряемое устройством 8, ухудшается, что ведот к уменьшению сигнала + &КГ и соответствующему -уменьшению углз нгклопз. Сочки 4, что,, я свою очередь, тзедет1 к снижению скорости перемещения гпрном массы вдоль бочки и соответствующему увеличению загрузки М. Последнее обуславливает рост частоты вращения бочки 4, а при достижении ею максимального значения и дальнейшем росте нагрузки М - к снижению скорости черпания н снижению производительности драги.
При достижении качестьом грохочения заданного значения выходные сигналы с элемента 11 сравнения равны нулю, а угол наклона бочки минимальный.
При дальнейшем ухудшедаи качества грохочения на выходе-, элемента 1 1 срав- HeHviH угол наклона бочки 4 остается минимальным, и появляется отрицательный сигнал рассогласования - &КГ, который подают на инвертор 12, Выходной сигнал с инвертора 12 суммируют с помощью сумматора 13 с псмозмпчгльным выходным сигналом элемента 10 сравнения а полученную сумму подают на вход
регулятора 3 скорости черпания, ре увеличения модуля отрицательного выходного сигнала элемента 11 сравне- ния скорость черпания снижается, что ведет к уменьшению загрузки бочки и, как следствие, уменьшению слагаемого +iM, а также к улучшению качества грохочения и, следовательно, к уменьшению модуля сигнала (- &КГ). В результате снижается выходной сигнал сумматора 13, что способствует стабилизации скорости черпания.
Таким образом, путем регулирования скорости черпания и частоты вращения бочки по сигналу рассогласования между фактической и заданной нагрузкой бочки поддерживается заполнение бочки, обуславливающее оптимальное при данном угле наклона бочки качество грохочения бочки, а сам угол наклона ре гулируется по сигналу рассогласования между фактически и заданный значениями качества грохочения.
10
15
Такое управление при добыче легко- промывистых пород обеспечивают высокую производительность за счет большого угла наклона бочки, а при добыче труднопромывистых пород - удовлетворительное качество дезинтеграции и грохочения за счет увеличения пути движения псродной частицы в бочКе,
15359446
По ме- так как уменьшается угол ее наклона, причем загрузка в бочке при любых углах ее наклона остается соответствующей наиболее высокому для этого угла наклона и этой производительности, коэффициенту грохочения, а производительность - максимально допустимой по условиям грохочения. Формула изобретения
Способ управления процессом драгирования, основанный на .управлении комплексом путам регулирования частоты вращения бочки по положительному и скорости черпания по отрицательному сигналам рассогласования между текущими и заданньм значениями нагрузки привода бочки до достижения равенства текущего значения заданному при минимальных значениях нерегулируемых параметров, отличающийся тем, тем, что, с целью повышения эффективности процесса драгирования и качества грохочения, осуществляют дополнительное регулирование угла наклона бочки но положительному сигналу рас- согласования между текущим и заданным значениями качества грохочения, а скорость черпания регулируют по сумме положительного сигнала рассогласования нагрузки привода бочки и модулю отрицательного сигнала рассогласования качества грохочения.
20
25
30
25
30
ct/mrx
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом драгирования | 1983 |
|
SU1105556A1 |
| Способ управления процессом драгирования | 1982 |
|
SU1071709A1 |
| Способ автоматического управления процессом драгирования и устройство для его осуществления | 1981 |
|
SU968196A1 |
| Устройство управления добычным комплексом драги | 1979 |
|
SU876862A1 |
| Устройство регулирования производительности драги | 1986 |
|
SU1372018A1 |
| Устройство управления добычным комплексом драги | 1980 |
|
SU972005A1 |
| Устройство управления добычным комплексом драги | 1987 |
|
SU1481428A1 |
| Способ определения производитель-НОСТи чЕРпАНия пРи дРАгиРОВАНии | 1979 |
|
SU806818A2 |
| Устройство для автоматического регулирования нагрузки черпаковой цепи драги | 1977 |
|
SU682604A1 |
| Устройство управления добычным комплексом драги | 1981 |
|
SU994627A2 |
Изобретение относится к горной промышленности и может найти применение при управления драгами. Цель - повышение эффективности процесса драгирования и улучшение качества грохочения. Для этого приводом 9 дополнительно регулируют наклон бочки 4 по сигналу положительного рассогласования +ΔКг между текушим и заданным значениями качества грохочения, которое измеряют устройством 8. Скорость черпания регулируют приводом 2 по сумме модуля отрицательного сигнала рассогласования -ΔКг между текущим и заданным значениями качества грохочения и положительного сигнала рассогласования +ΔМ между текущим и заданным значениями нагрузки бочки. Частоту Nб вращения бочки 4 регулируют приводом 5 по сигналу -ΔМ отрицательного рассогласования между текущим и заданным значениями нагрузки бочки до достижения равенства между ними при минимальных значениях нерегулируемых параметров. Сигналы рассогласования измеряют элементами 10, 11 и 13 сравнения. 2 ил.
| Способ управления добычным комплексом драги | 1984 |
|
SU1214856A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления процессом драгирования | 1983 |
|
SU1105556A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
