(54) УСТРОЙСТВО УПРАВЛЕНИЯ ДОБЫЧНЫМ КОМПЛЕКСОМ
ДРАГИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления добычным комплексом драги | 1981 |
|
SU994627A2 |
| Устройство управления добычным комплексом драги | 1982 |
|
SU1114745A1 |
| Устройство управления добычным комплексом драги | 1980 |
|
SU972005A1 |
| Устройство регулирования производительности драги | 1986 |
|
SU1372018A1 |
| Устройство управления добычным комплексом драги | 1986 |
|
SU1434038A1 |
| Устройство для автоматического регулирования добычного комплекса драги | 1980 |
|
SU1076538A1 |
| Способ автоматического управления процессом драгирования и устройство для его осуществления | 1981 |
|
SU968196A1 |
| Устройство управления добычным комплексом драги | 1987 |
|
SU1481428A1 |
| Способ управления процессом драгирования | 1983 |
|
SU1105556A1 |
| Способ автоматического управления процессом драгирования | 1988 |
|
SU1609877A1 |
I
Изобретение относится к добыче (юлезнь1х ископаемых и может найти применение для автоматизации процесса драгирования.
Известно устройство управления землесосным снарядом, содержащее датчики скорости разрыхлителя и поворота снаряда на прорези, датчики нагрузки, сумматоры, усилители мощности и блок определения максимума мощности. Устройство автоматически поддерживает скорость папильонирования такой, чтобы загрузка привода разрыхлителя была максимальна, т. е. близка к экстремуму (11.
К недостаткам устройства относится повышенный удельный расход электроэнергии на разрыхление, так как соотнощение скоростей резания и подачи (параметры стружки) не выдерживается оптимальным. Кроме того, блок определения максимума мощности исключается из работы, когда появляется сигнал по перегрузке гидротранспорта. Это происходит из-за того, что на блок максимума мощпости воздействует только привод боковой подачи, а его скорость в данных условиях и так уже рг)ап11ч-сна по производительности.
Наиболее близким по технической сущности к предлагаемому является устройство управления добычным комплексом драги. Указанное устройство состоит из трех взаимосвязанных контуров автоматического регулирования: контура регулирования скорости черпания, контура регулирования . скорости боковой подачи, контура регулирования нагрузки бочки.
Контуры регулирования содержат датчики регулируемых величин, сумматоры, за10 датчики, усилители и объект управ.1ения. Кроме того, в состав контура регулирования скорости боковой подачи входит датчик поворота драги, множнтельно-делительиое устройство, блок ограничения и устройство ориентации. Система работает в режиме обеспечения заданной производительности (нагрузки бочки), характерном при отработке легких грунтов, и в режиме стабилизации мощности главного привода. Режим характерен при отработке тяжелых грунтов. Работа в режиме заданной производительности осуп1ествляется управлением скоростей черпания и боковой подачи от задатчика производительности нагрузки бочки по соответствующим каналам контуров регулировання скоростей черпания и боковой подачи. При этом сигнал с датчика нагрузки бочки подается на вход сумматора коитура регулирования нагрузки бочки, на другой вход которого подключен задатчик нагрузки -бочки. В режиме стабилизации заданной мощности главного привода скорости черпания и боковой подачи регулируются при изменении нагрузки главного привода. При черпании крепких грунтов скорость черпания остается постоянной, равной номинальной, а стабилизация заданной мощности осуществляется только изменением скорости боковой подачи. Компенсация возмущения от изменяющейся длины стружки осуществляется .также регулированием скорости боковой подачи 2}.
К недостаткам устройства относятся потери полезного компонента при меняющейся в широких пределах производительности добычного комплекса драги вследствие остановок, отработки валунов и линз мерзлоты, выхода драги в отработанное пространство. В установившемся режиме работы драги распределение гориой массы по длине дрожной бочки соответствует определенному (близкому и экспоненциональному) закону, и весь объем горной массы определяет момент нагрузки на .валу двигателя бочки. При пуске драги на легких грунтах производительность черпающего механизма максимальная, превышающая пропускную способность бочки, в то время, как двигатель черпаковой цепи не разгружен. На головных ставах бочки образуется слой породы, значительно больше допустимого. Мелкая фракция (эфеля) на первых щлюзах не успевает просеиваться через перфорацию, ком горной породы проходит по всей длине бочки, и часть эфелей уходит с галей в отвал. После того, как нагрузка бочки возрастает до заданного значения, происходит снижение производительности черпающего механизма и распределение горной массы постепенно становится нормальным
Цель изобретения - повышение эффективности управления за счет снижения потерь полезного компонента при меняющейся в щироких пределах производительности добычного комплекса.
Указанная цель достигается тем, что контур регулирования нагрузки бочки снабжен дифференцирующим усилителем, вход которого соединен с выходом датчика нагрузки прив.ода бочки, а выход - со входом сумматора. .
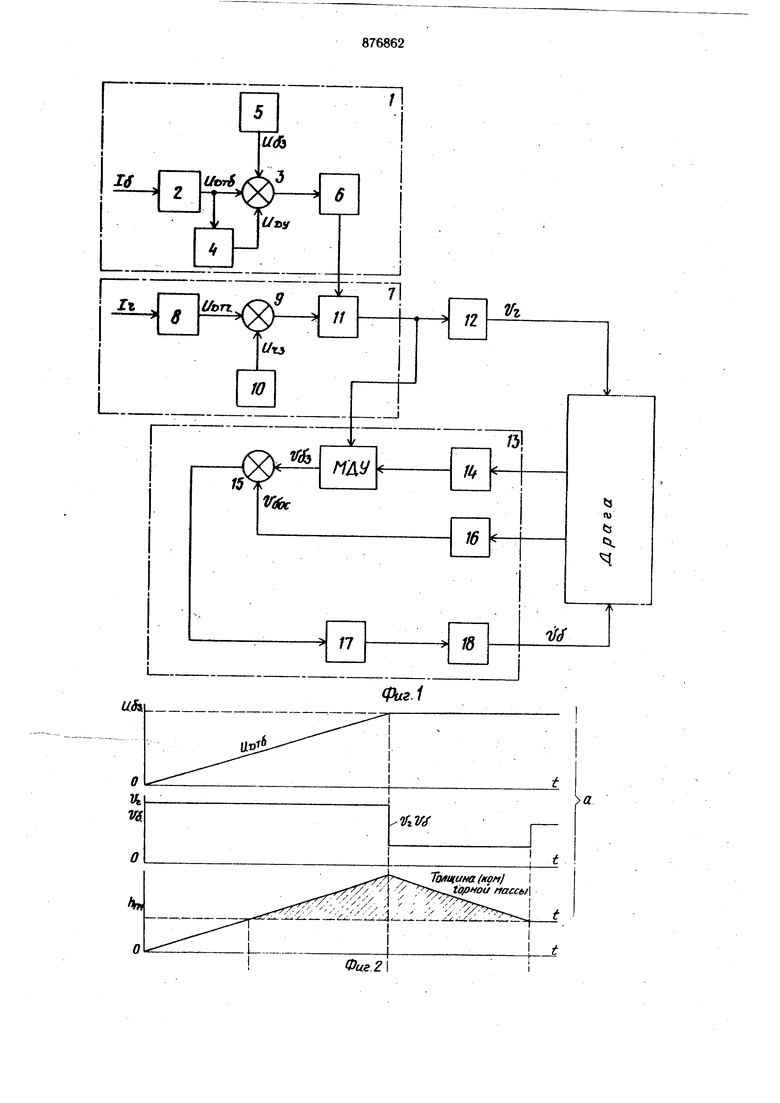
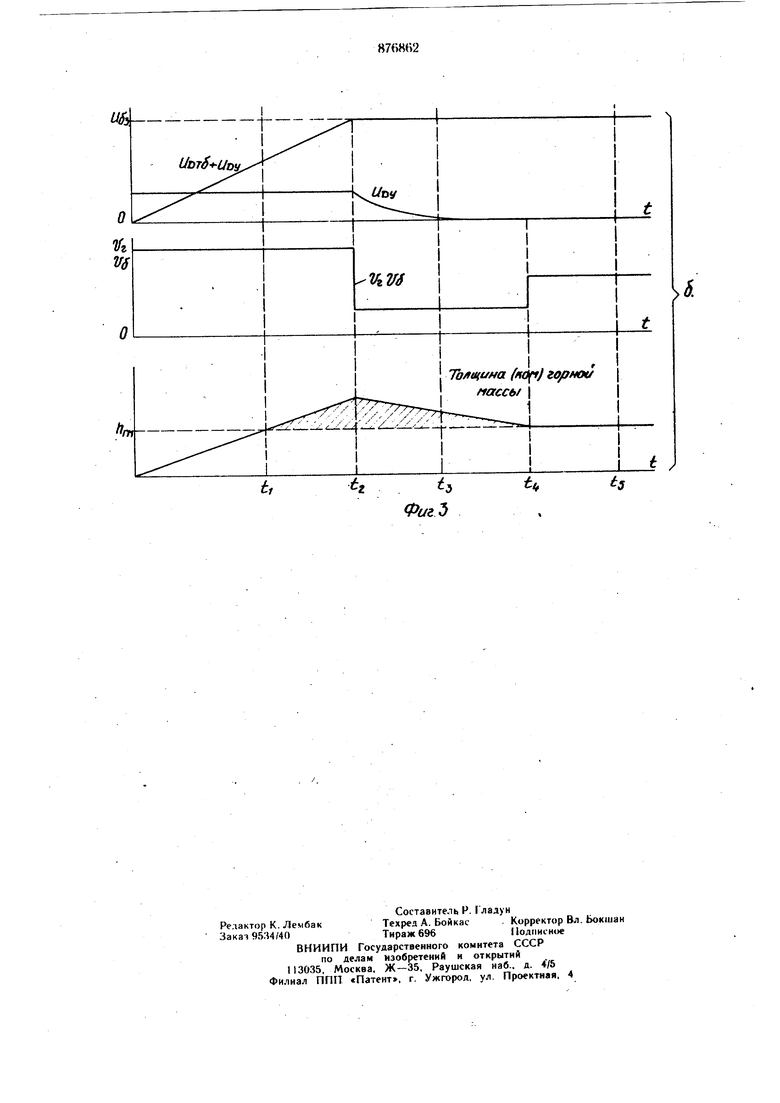
На фиг. I представлена структурная схема предлагаемого устройства; на фиг. 2 - кривые нагрузки привода бочки, скоростей черпания и боковой подачи, толщины слоя горной массы до введения дифференцирующего усилителя; на фиг. 3 - те же кривые после введения дифференцирующего уси.пителя.
Устройство содержит контур 1 регулирования нагрузки бочки, в состав которого входит датчик 2 нагрузки привода бочки, выход которого соединен с одним входом сумматора 3 и через дифференцирующий усилитель 4 дополнительио соединен с другим входом сумматора. Задание по нагрузке привода бочки UBJ задается вручную или автоматически с помощью задатчика 5 нагрузки привода бочки например потенциометрического. Выход сумматора 3 соединен через
усилитель 6 с суммирующим усилителем кон- тура Трегулирования скорости черпания. Контур 7 регулирования скорости черпания состоит из датчика 8 нагрузки привода черпаковой цепи, выход которого соединен с одним из входов сумматора 9. Задание по
нагрузке привода черпания U, задается вручную или автоматически с помощью задатчика 10 нагрузки привода черпаковой цепи. Выход сумматора 9 соединен с другим входом суммирующего усилителя II контуФ ра регулирования скорости черпания, выход суммирующего усилителя II - с тиристорным приводом 12 черпаковой цепи и входом множительного делительного устройства (МДУ)контура 13 регулирования скорости боковой подачи, другой вход которого сое динен с выходом датчика 14 угла поворота драги. В качестве датчика угла поворота Драги может быть использован, например, гироскопический указатель поворота объекта. Выход множительно-делительного устройства соединен со входом сумматора 15 и является сигналом боковой скорости драги VRJ.. Другой вход сумматора 15 соедииен с выходом датчика 16 угловой скорости драги, в качестве которого может быть, например, использован гироскопический тахометр типа
i «ДУСМ-А.
В основе конструкции тахометра заложен двухстепенный гироскоп с электричес: КИМ преобразователем угла поворота на выходе, величина которого характеризует
0 угловую скорость объекта. Выход сумматора 15 соединен через усилитель 17 с тиристоркым .приводом 18 лебедок носовых канатов.
Устройство работает следующим образом.
Устройство регулирует скорости приводов черпаковой Цепи и боковой п.одачи одновременно и пропорционально в зависимости от нагрузки привода черпаковой цепи или . от нагрузки привода бочки. При увеличении
g тока нагрузки привода черпаковой цепи выше заданного значения (Uerr Ui4.j), например при увеличении крепости грунта, сигнал на выходе суммирующего усилителя И пропорционально снижается, вызывая понижение скорости тнристорного привода 12 чер1паковой и одновременно снижение выходного сигнала, МДУ -- сигнала задания боковой подачи VRI., в результате чего на выходе усилителя 17 сигнал также снижается.
вызывая понижение скорости боковой подачи драги. Снижение скоростей черпания и боковой подачи происходит до момента равенства тока нагрузки черпаковой цепи заданному значению (UR 1)4.5). При снижении тока нагрузки черпаковой цепи ниже заданного происходит соответственное увеличение скоростей черпания и боковой подачи таким образом, что нагрузка черпаковой цепи всегда поддерживается постоянной. Аналогичная реакция схемы возникает и при изменениях тока нагрузки приводи бочки. При превышении сигналом нагрузки бочки заданного значения, т. е. UOT. , на выходе усилителя 6 выходной сигнал понижается, вызывая соответственное понижение выходиого сигнала на рыходе суммирующего усилителя И, что вызывает, как уже разбиралось ранее, понижение как скорости черпания, теки боковой подачи. При этом производительность черпающего мехаиизма драги снижается до величины, когда ток нагрузки бочки станет равным заданному, т. е. также поддерживается постоянным.
Пропорционально скорости нарастания нагрузки бочки на выходе дифференцирующего усилителя 4 появляется сигнал Оду, направленный согласно с сигналом идть на выходе датчика 2 нагрузки. Когда суммарный сигнал ( + UBJ, ) превысит сигнал задания Ue, начинается ограничение (умень шение) сигнала на выходе суммирующего усилителя П с соответствующим снижением скоростей черпания Уч и боковой подачи Vs. Темп нарастания нагрузки и соответственно сигнала UAT нагрузки, бочки замедляется (см. график фиг. 2). При этом горка (ком) горной массы образуется меньшей величины (заштрихованная область кривой толщины слоя горной массы).
В множите.чьно-делительном устройстве (МДУ) происходит деление сигнала, пропорционального скорости черпания, на косинус угла поворота драги от оси забоя. На выходе .МДУ формируется сигнал задания скорости боковой подачи (Vgj), который сравнивается с сигналом обратной связи Vgoe. поступающим с датчика 16 угловой скорости драгн. С помощью усилителя 7 и тиристррного привода 18 лебедок носовых канатов скорость боковой подачи поддерживается в соответствии с заданием VBJ.
Датчик- 1.4 угла поворота драги ориентируется по оси забоя вручную или автоматически при каждом зашагивании драги.
Одновременное регулирование скоростей черпания и боковой подачи драги с введением упреждающего сигнала по скорости нарастания нагрузки бочки снижает потери ценного компонента при меняющейся в широких пределах производительности добычиого комплекса драги на остановках, отработках валунов, линз мерзлоты, выхода драги в выработанное пространство и т. д., а также исключает возможность перегрузки привода бочки, повышает эксплуатационную надежность агрегата в целом.
В результате исследований и предварительных наладочных испытаний установлено, что потери эфелей с галечиым продуктом, возникающие вследствие изменения производительности добычного комплекса, снижаются с 0,8-1«/о до 0,1--0,2/о, что приводит к снижении) потерь ценного компонента.
Формула изобретения
Устройство управления добычным комплексом драги, содержащее контур регулирования нагрузки бочки, включающий датчик и задатчик нагрузки привода бочки, подключенные к сумматору, и усилитель, подключенный к суммирующему усилителю контура регулирования скорости черпания, вклю чающего датчик и задатчик нагрузки привода черпаковой цепи, подключенные к сумматору, соединенному с суммирующим усилителем, выход которого подключен к тиристориому приводу черпаковой цепи и ко входу множительно-делительного устройства контура регулирования скорости боковой подачи, включающего датчик угла поворота драги, датчик угловой скорости драги, сумматор и усилитель, отличающееся тем, что, с целью повышения эффективности управления за счет снижения потерь полезного компонента при меняющейся в широких пределах производительности добычного комплекса, контур регулирования нагрузки бочки сиабжен дифференцирующим усилителем, вход которого соединен с выходом датчика нагрузки привода бочки, а выход - со входом сумматора.
Источники информации.
прннятые во внимание при экспертизе
USvL.
О Vt Ч
fh,
О
Фиг.
Толщина (яом topHou rtacci i
