1
(21) 267 73/25-29
(22)2.06.87
(46) 15.01.90. Бюл. V 2
(71)Московский автомеханический институт
(72)В.К.Соковиков, В.А.Козлов, И.М.Чанонси и А.Т.Скойбеда (53) 62-521 (088.8)
(56) Авторское свидетельство СССР N- 1116230, кл. F 15 В 3/00, 1983.
( ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ
(57) Изобретение относится к гидроавтоматике и может быть использовано в гидроприводах станков и промышленных роботов. Цель изобретения - повышение точности, сокращение габаритов и массы усилителя. Пояски 2,3 и 5 распределительного золотника 1 соединены штоком 6, размещенным в гильзе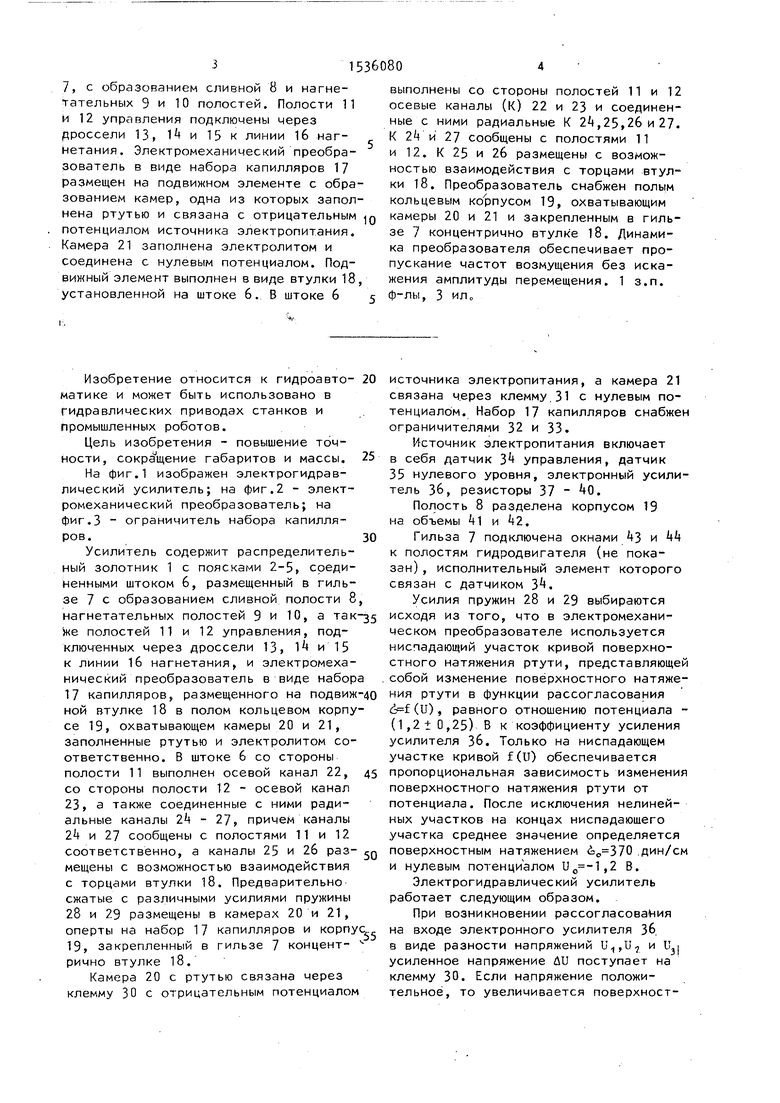
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический усилитель | 1983 |
|
SU1393939A1 |
| ДВУХКАНАЛЬНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ | 2013 |
|
RU2553588C1 |
| Устройство для преобразования электрического сигнала в линейное перемещение | 1984 |
|
SU1191962A1 |
| Устройство для перемещения клапана газораспределительного механизма двигателя внутреннего сгорания | 1987 |
|
SU1523689A1 |
| СПОСОБ ИССЛЕДОВАНИЯ ЭЛЕКТРОКАПИЛЛЯРНЫХ ЯВЛЕНИЙ НА ЖИДКОМ ЭЛЕКТРОДЕ И УСТРОЙСТВО ДЛЯ ИХ РЕГИСТРАЦИИ | 1992 |
|
RU2069849C1 |
| Гидравлический следящий привод | 1980 |
|
SU939844A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С ЦИФРОВЫМ УПРАВЛЕНИЕМ | 1973 |
|
SU393481A1 |
| Система управления рулевыми органами летательного аппарата | 1990 |
|
SU1744001A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ АГРЕГАТ, СЛЕДЯЩИЙ ДВУХКАСКАДНЫЙ ГИДРОУСИЛИТЕЛЬ И РЕГУЛИРУЕМЫЙ СИЛОВОЙ ДРОССЕЛЬ | 2002 |
|
RU2242641C2 |
| ГИДРОУСИЛИТЕЛЬ | 2006 |
|
RU2307960C1 |
Изобретение относится к гидроавтоматике и может быть использовано в гидроприводах станков и промышленных роботов. Цель изобретения - повышение точности, сокращение габаритов и массы усилителя. Пояски 2, 3, 4 и 5 распределительного золотника 1 соединены штоком 6, размещенным в гильзе 7, с образованием сливной и нагнетательной полостей 9 и 10. Полости 11 и 12 управления подключены через дроссели 13, 14 и 15 к линии 16 нагнетания. Электромеханический преобразователь в виде набора капилляров 17 размещен на подвижном элементе с образованием камер, одна из которых заполнена ртутью и связана с отрицательным потенциалом источника электропитания. Камера 21 заполнена электролитом и соединена с нулевым потенциалом. Подвижный элемент выполнен в виде втулки 18, установленной на штоке 6. В штоке 6 выполнены со стороны полостей 11 и 12 осевые каналы (К) 22 и 23 и соединенные с ними радиальные К 24, 25, 26 и 27. К 24 и 27 сообщены с полостями 11 и 12. К 25 и 26 размещены с возможностью взаимодействия с торцами втулки 18. Преобразователь снабжен полым кольцевым корпусом 19, охватывающим камеры 20 и 21 и закрепленным в гильзе 7 концентрично втулке 18. Динамика преобразователя обеспечивает пропускание частот возмущения без искажения амплитуды перемещения. 1 з.п. ф-лы, 3 ил.
(Л
ел
со о
о
00
Фиг1
31
/, с образованием сливной 8 и нагнетательных 9 и 10 полостей. Полости 11 и 12 управления подключены через дроссели 13, 1 и 15 к линии 16 нагнетания. Электромеханический преобразователь в виде набора капилляров 17 размещен на подвижном элементе с обра
выполнены со стороны полостей 11 и 12 осевые каналы (К) 22 и 23 и соединенные с ними радиальные К 2k,25,26 и 27. К 2k и 27 сообщены с полостями 11 и 12. К 25 и 26 размещены с возможностью взаимодействия с торцами втулки 18. Преобразователь снабжен полым кольцевым корпусом 19, охватывающим
зованием камер, одна из которых заполнена ртутью и связана с отрицательным JQ камеры 20 и 21 и закрепленным в гиль- потенциалом источника электропитания. зе 7 концентрично втулке 18. Динами- Камера 21 заполнена электролитом и ка преобразователя обеспечивает про- соединена с нулевым потенциалом. Подвижный элемент выполнен в виде втулки 18,
пускание частот возмущения без искажения амплитуды перемещения. 1 з.п.
установленной на штоке 6. В штоке 6 $ ф-лы, 3 илс
Изобретение относится к гидроавто- матике и может быть использовано в гидравлических приводах станков и промышленных роботов.
Цель изобретения - повышение точности, сокращение габаритов и массы.
На фиг.1 изображен электрогидравлический усилитель; на фиг.2 - электромеханический преобразователь; на фиг.З ограничитель набора капилляров.
Усилитель содержит распределительный золотник 1 с поясками 2-5, соединенными штоком 6, размещенный в гильзе 7 с образованием сливной полости 8 нагнетательных полостей 9 и 10, а так же полостей 11 и 12 управления, подключенных через дроссели 13, 1 и 15 к линии 16 нагнетания, и электромеханический преобразователь в виде набор 17 капилляров, размещенного на подвиж ной втулке 18 в полом кольцевом корпусе 19, охватывающем камеры 20 и 21, заполненные ртутью и электролитом соответственно. В штоке 6 со стороны полости 11 выполнен осевой канал 22, со стороны полости 12 - осевой канал 23, а также соединенные с ними радиальные каналы - 27, причем каналы 2k и 27 сообщены с полостями 11 и 12 соответственно, а каналы 25 и 26 размещены с возможностью взаимодействия с торцами втулки 18. Предварительно сжатые с различными усилиями пружины 28 и 29 размещены в камерах 20 и 21 , оперты на набор 17 капилляров и корпу 19, закрепленный в гильзе 7 концент- рично втулке 18.
Камера 20 с ртутью связана через клемму 30 с отрицательным потенциалом
выполнены со стороны полостей 11 и 12 осевые каналы (К) 22 и 23 и соединенные с ними радиальные К 2k,25,26 и 27. К 2k и 27 сообщены с полостями 11 и 12. К 25 и 26 размещены с возможностью взаимодействия с торцами втулки 18. Преобразователь снабжен полым кольцевым корпусом 19, охватывающим
камеры 20 и 21 и закрепленным в гиль- зе 7 концентрично втулке 18. Динами- ка преобразователя обеспечивает про-
камеры 20 и 21 и закрепленным в гиль- зе 7 концентрично втулке 18. Динами- ка преобразователя обеспечивает про-
пускание частот возмущения без искажения амплитуды перемещения. 1 з.п.
5
0
0
з 40
45
50
источника электропитания, а камера 21 связана через клемму 31 с нулевым по тенциалом. Набор 17 капилляров снабжен ограничителями 32 и 33.
Источник электропитания включает в себя датчик управления, датчик 35 нулевого уровня, электронный усилитель 36, резисторы 37 - 0.
Полость 8 разделена корпусом 19 на объемы Д1 и Д2.
Гильза 7 подключена окнами 3 и kk к полостям гидродвигателя (не показан) , исполнительный элемент которого связан с датчиком 3.
Усилия пружин 28 и 29 выбираются исходя из того, что в электромеханическом преобразователе используется ниспадающий участок кривой поверхностного натяжения ртути, представляющей собой изменение поверхностного натяжения ртути в функции рассогласования (U) , равного отношению потенциала - (1,2tO,25) В к коэффициенту усиления усилителя 36. Только на ниспадающем участке кривой f(U) обеспечивается пропорциональная зависимость изменения поверхностного натяжения ртути от потенциала. После исключения нелинейных участков на концах ниспадающего участка среднее значение определяется поверхностным натяжением дин/см и нулевым потенциалом ,2 В.
Электрогидравлический усилитель работает следующим образом.
При возникновении рассогласования на входе электронного усилителя 36 в виде разности напряжений U1fU7 и V | усиленное напряжение UU поступает на клемму 30. Если напряжение положительное, то увеличивается поверхност
мое натяжение ртути и она из набора
17капилляров смещается в камеру 20, а освободившееся пространство заполняется электролитом из камеры 21. При этом изменяется равновесие сил, т.е.
в камере 20 увеличивается давление, а в камере 21 уменьшается на величину, пропорциональную напряжению. Набор 17 капилляров совместно с втулкой
18начинает перемещаться по штоку 6 золотника 1 вправо до тех пор, пока разность давлений не уравновесится действием сил со стороны пружин 28 и 29. При смещении подвижной втулки 18 вправо уменьшается перекрываемая площадь радиального канала 25, а перекрываемая площадь радиального канала 26 увеличивается. В этом случае давление в полости 11 управления уменьшается, а в полости 12 управления увеличивается, золотник 1 начинает двигаться вправо, выравнивая перекрываемые площади радиальных каналов 25, 26 и обеспечивая обратную связь по положению, расход из линии 16 поступает в одну полость гидродвигателя и из другой идет на слив. Исполнитель ный элемент гидродвигателя совместно с исполнительным элементом датчика
3 управления, смещаясь, обнуляет напряжение Ли, при уменьшении которого поверхностное натяжение ртути в камере 20 уменьшается и она вновь входит в капилляры набора 17 капилляров, вытесняя электролит. Происходит уравновешивание сил, подвижные элементы электромеханического преобразователя совместно с подвижной втулкой 18 устанавливаются в нейтральное положение.
Аналогично работает электрогидравлический усилитель при изменении знака ди.
Работа электромеханического преоб
разователя обеспечивается относительн нулевого напряжения U0 -1,2 В, соответствующего середине ниспадающей ветви поверхностного натяжения ртути в функции рассогласования. подачи напряжения U0 служит датчик 35 нулевого уровня, сигнал с которого после усиления в электронном усилителе 36 при отсутствии напряжения с датчика 3 управления равен - 1,2 В. Подвижные элементы электромеханического преобразователя совместно с подвижной втулкой 18 перемещаются на величину, пропорциональную этому напряжению,
20
Q
60806
обеспечивая равенство всех сил, в том числе сил пружин 28 и 29, при этом пружина 28 сжимается. Это является нейтральным положением электромеханического преобразователя, в котором перекрываемые подвижной втулкой 18 площади отверстий радиальных каналов 25 и 26 равны. В нейтральном положении усилителя при одинаковой жесткости пружин 28 и 29 имеет место разное их предварительное поджатие.
Работа электромеханического преобразователя обеспечивается при напря- 5 женми /3U 40,25 В, т.е. электронный
усилитель 36 должен иметь небольшой коэффициент усиления, что приводит к уменьшению его смещения и дрейфа нуля, т.е. повышению точности работы. Управление электромеханическим преобразователем обеспечивается от минуса источника питания, так как U0 ± (1,2± t2,5) В. Так как в объемах Ц и k2
25 ромеханический преобразователь, давление слива и эффективная площадь поперечного сечения подвижной втулки 18
0
втулкой 18 и золотником 1 мало и отсутствуют дополнительные силы, препятствующие перемещению подвижных элементов электромеханического преобразователя, то суммарное усилие, необходимое на перемещение подвижной втулки 18, очень мало, что позволяет выпол- -нить электромеханический преобразователь таким, чтобы он имел габариты, необходимые для его размещения внутри усилителя. При этом динамика электромеханического преобразователя такова, что он обеспечивает пропускание частот возмущения без искажения амплитуды перемещения до 800-1000 Гц. Осевая длина электромеханического преобразователя может быть равна 6-7 мм, поэтому осевое увеличение усилителя незначительно.
0
5
Формула изобретения
-it .t
Составитель С.Рождественский Редактор И.Рыбченко Техред Л.Сердкжова
щен с возможностью взаимодействия с одним торцом втулки, при этом электрмеханический преобразователь снабжен полым кольцевым корпусом, охватывающим камеры с ртутью и электролитом и закрепленным в гильзе концентрично подвижной втулке.
Корректор Т.Палий
