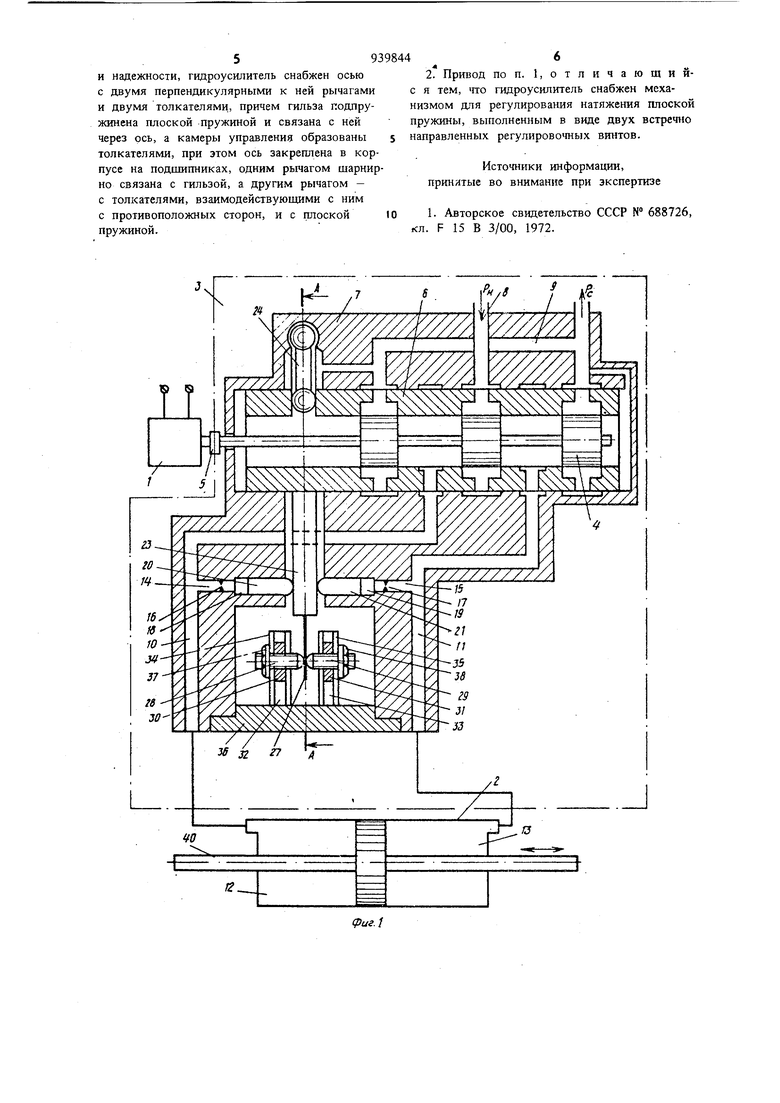
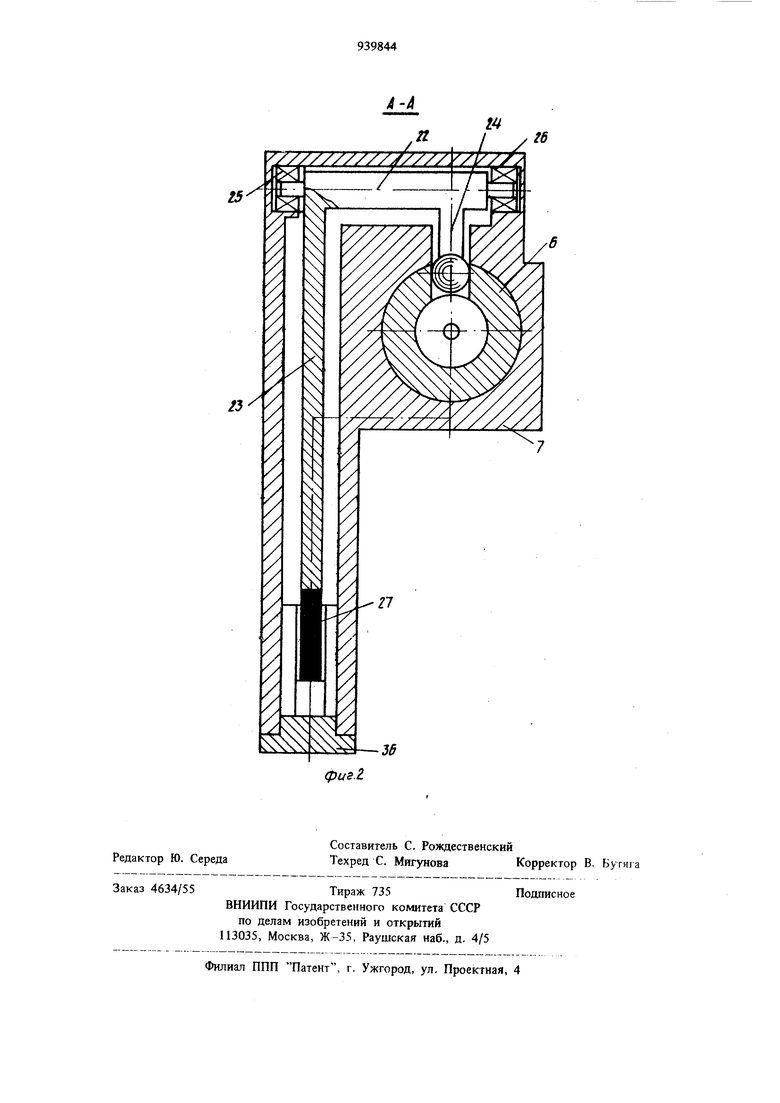
(54) ГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД Изобретение относится к гидроавтоматике, в частности к гидравлическим приводам с дроссельным регулированием и может быть использовано на объектах, где требуется на выходных звеньях привода создавать усилия или нагрузки, функционально зависимые от величины входного управляющего сигнала, например, при воздействии отвала или плуга на почву, прессовании деталей, управлении рулями летательных аппаратов и кораблей, резании материалов и т.п., а также для созд ния программных нагрузок при испытаниях. Известен гидравлический следящий привод содержащий задающее устройство, гидродвигатель и гидроусилитель с Щ1линдрическим золотником, связанным с задающим устройством и размещенным в подвижной подпружиненной гильзе, установленной в корпусе, имеющем каналы питания, слива и управлени подключенные соответственно к источнику ра бочей жидкости, баку и к полостям гидродв гателя, а также каналы обратной связи по давлению с дросселями, подключенные к пол стям пщродвигателя и к камерам управления гильзой, образованным в корпусе 1. Недостатками известного привода являются низкие точность и надежность вследствие воздействия пружин на торцы подвижной гильзы что приводит к перекосу гильзы в корпусе и к снижению точности установки нейтрального положения гидроусилителя. Цель изобретения - повышение точности и надежности. Указанная цель достигается тем, что гидроусилитель снабжен осью с двумя перпендикулярными к ней рычагами и двумя толкателями, причем гильза подпружинена плоской пружиной и связана с ней через ось, а камеры управления образованы толкателями, при этом ось закреплена в корпусе на подшипниках, одним рычагом щарнирно связана с гильзой, а другим рычагом с толкателями, взаи.модействующими с ним с противоположных сторон, и с плоской пружиной. Кроме того, гидроусилитель снабжен механизмом для регулирования натяжения плос393кой пружины, выполненным в виде двух встречно направленных регулировочных винтов. На фиг. 1 изображен предлагаемый гидравлический следящий привод, разрюз; на фиг. 2 - разрез А-А на фиг. 1. Привод содержит задающее устройство, например, электромеханический преобразователь 1, гидродвигатель 2 и гидроусилитель 3 с цилиндрическим золотником 4, связанным муф той 5 с электромеханическим преобразователем 1 и размещенным в подвижной подпружи ненной гильзе 6, установленной в корпусе 7, имеющем канал 8 питания, канал 9 слива, и каналы 10 и 11 управления, подключенные .соответственно к источнику рабочей жидкости и баку (не изображены) и к полостям 12 и 13 гидродвигателя 2, а также каналы 14 и 15 обратной .связи по давлению с дросселями 16 и 17, подключенные к полостям 12 и 13 гидродвигателя 2 и к камерам 18 и 19 управления гильзой 6, образованным в кор пусе 7 толкателями 20 и 21. Гидроусилитель 3 снабжен осью 22 с перпендикулярными ей рычагами 23 и 24, закрепленной в корпусе на подшипниках 25 и 26, рычаг 23 шарнирно связан с гильзой 6, а рычаг 24 - с.толкателями 20 и 21, взаимодействующими с ним с противоположных сторон, и с плоской пружиной 27, которой подпружинена гильза 6. При этом гидроусилитель 3 снабжен механиз-, MOM для регулирования натяжения плоской пружины 27, выполненным в виде встречно установленных регулировочных винтов 28 и 29, которые могут перемещаться в горизонтальном направлении (по чертежу) по резьбе в прямоугольных втулках 30 и 31 ив верти кальном направлении вместе с этими втулками в лазах 32 и 33 стоек 34 и 35, закреплен ных на -крыщке 36, жестко связанной с корпусом 7. Втулки 30 и 31 фиксируются гайками 37 и 38. Гидродвигатель 2 имеет поршень 39 с двусторонним штоком 40. Гидравлический следящий привод работает следующим образом. При отсутствии сигнала V в электромеханическом преобразователе 1 и нагрузки F на штоке гидродвигателя 2 и установленном давлении РН в канале питания золотник 4 занимает нейтральное положение, а подвихсная гил за 6 при этом с помощью регулировочных вин тов 28 и 29 через пружину 27 и ось 22 уста навливается в согласованное с золотником. 4 положение так, чтобы давления Pj и PI в полостях 12 и 13 гидродвкгателя 2 были равны. Таким образом, производится регулировка привода. При подаче без нагрузки управляющего сигнала, например, напряжение V на электромеха нический преобразователь 1 такого знака, чтобы золотник 4 перемещался вправо на определенную величину .Хз, тогда между золотником и гильзой 6, появляется относительное смещение Xj-Хр, где Xj- - перемещение гильзы 6, благодаря чему жидкость из канала 8, поступая в канал 10 под перепадом давлений PH-PI, где PI - давление в канале 8, перемещает поршень 39 гидродвигателя 2 с определенной скоростью, который в свою очередь, вытесняет жидкость из канала 11 в канал 9 подперепадом давлений Pj-Pc, где Р2 -- давление в канале 11, PC - давление в канале 9. При появлении нагрузки на щтоке 40 гидродвигателя 2 появляется перепад давлений Pj-Рг в камерах 18 и 19 толкателей 20 и 21 в результате чего последние, воздействуя через ось 22 и рь1чаги 23 и 24, перемещают гильзу 6 в направлении уменьшения смещения Хз-Х, в данном случае, вправо и скорость порщня 39 гидродвигателя 2 уменьшается. Прк дальнейшем увеличении Нагрузки на штоке 40 скорость его уменьшается, доходит до нуля, а затем изменяет свое направление. П{ж нодаче на электромеханический преобразователь 1 управляющего сигнала знака противоположного предыдущему, перемещение цгтока 40 щдродвигателя 2 происходит также, но в направлении противоположном предыдущему. Если плоская пружина 27 выбирается таким образом, что угол поворота оси 22 с рычагами 23 и 24 пропордионален прик;та дываемому к нему моменту, то усилия, получаемые на штоке 40 гидродвигателя 2, практически пропордионапьны перемещению золотника 4. Применение предлагаемого изобретения в системах регулирования усилия летательных аппаратов, кораблей, сельскохозяйственных и испытательных машин позволит повысить их точность и надежность и, следовательно, эффективность их использования. Формула изобретения 1. Гидравлический следящий привод, содержащий задающее устройство, гидродвигатель и гидроусилитель с цилиндрическим золотником, связанным с задающим устройством и размещенным в подвижной подпружиненной гильзе. установленной в корпусе, имеющем каналы питания, слива и управления, подключенные соответственно к источнику рабочей жидкости, баку и к полостям гвдродвигате.чя, а также каналы- обратной связи по давлению с дросселями, подключенные к полостям гидроцвигателя и к камерам управления тильзой, образованным в корпусе, о т л и ч а ю щ и йс я тем, что, с целью повышения тпчисюти
и надежности, гидроусилитель снабжен осью с двумя перпендикулярными к ней рычагами и двумя толкателями, причем гильза подпружинена плоской пружиной и связана с ней через ось, а камеры управление образованы толкателями, при этом ось закреплена в корпусе на подшипниках, одним рычагом шарнирно связана с гильзой, а другим рычагом с толкателями, взаимодействующими с ним с противоположных сторон, и с плоской пружиной.
2. Привод по п. 1, о т л и ч а ю щ и йс я тем, что гидроусилитель снабжен механизмом для регулирования натяжения плоской пружины, выполненным в виде двух встречно направленных регулировочных винтов.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 688726, кл. F 15 В 3/00, 1972.

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ОГРАНИЧИТЕЛЬ МОЩНОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2006 |
|
RU2309302C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| ГИДРОУСИЛИТЕЛЬ | 2006 |
|
RU2307960C1 |
| Гидравлический следящий привод | 1988 |
|
SU1560836A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| Электрогидравлический следящий привод | 1978 |
|
SU754124A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1973 |
|
SU1840517A1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ РЕГУЛИРУЕМЫМ АКСИАЛЬНО-ПОРШНЕВЫМ НАСОСОМ | 1991 |
|
RU2018708C1 |
| РЕДУКЦИОННЫЙ КЛАПАН | 2006 |
|
RU2312265C1 |
/3
6
