да фазового звена 4 сигнал U. с допол-., плитудный детектор 9 и аттенюатор 7 нительным фазовым сдвигом ц JR посту
пает на первый вход сумматора 5. Одновременно с этим входной сигнал U через фазовое звено 6, в котором он приобретает фазовый сдвиг Cfq, i6i6 поступает на второй вход сумматора 5. В результате суммирования колебаний Uj и U в сумматоре 5 фаза колебанийср на его выходе при условии, что используются фильтры 2 и 3 нижних частот и фа55
образуют цепь автоматической регулировки амплитуды авток олебаний в системе. При достаточной амплитуде выходного напряжения амплитудного- д тектора 9, соединенного выходом с уп равляющим входом аттенюатора 7, последний поддерживает в автоколебательной системе колебания синусоидальной формы, В динамическом режиме изменение измеряемого воздействия приводит к изменению коэффициен та передачи амплитудного датчика 1, что, в свою очередь, вы ывает изменение фазового сдвига Ср колебания на
зовые звенья
4 и 6 первого порядка с
КФ}64 ГДе S e iB6 модули ко-эффициентов передачи фазовых
звеньев 4 и 6 соответственно, равна
, плитудный детектор 9 и аттенюатор 7
5
образуют цепь автоматической регулировки амплитуды авток олебаний в системе. При достаточной амплитуде выходного напряжения амплитудного- детектора 9, соединенного выходом с управляющим входом аттенюатора 7, последний поддерживает в автоколебательной системе колебания синусоидальной формы, В динамическом режиме изменение измеряемого воздействия приводит к изменению коэффициента передачи амплитудного датчика 1, что, в свою очередь, вы ывает изменение фазового сдвига Ср колебания на
выходе сумматора 5. При этом условие баланса фаз выполняется на другой частоте, и частота автоколебаний на выходе усилителя 8 изменяется в соответствии с изменением коэффициента передачи амплитудного датчика 1. По величине и знаку отклонения частоты автоколебаний на выходе усилителя 8 судят о величине и знаке отклонения коэффициента передачи амплитудного датчика 1, а следовательно, и о величине и знаке отклонения измеряемой физической величины. Применение цепи автоматической регулировки амплитуды, состоящей из амплитудного детектора 9 и аттенюатора 7, позволяет увеличить крутизну характеристики преобразования устройства. Это объясняется тем, что благодаря наличию данной цепи в рассматриваемом преобразователе поддерживаются гармонические автоколебания и сохраняются фазовые соотношения, определяемые соотношением (1). Если цепь автоматического регулирования амплитуды отсутствует, то при переходе в более низкочастотную область с изменением преобразуемого физического параметра форма автоколебаний изменяется, приближаясь к прямоугольной. Это объясняется тем, что коэффициент усиления усилителя 8, коэффициенты передачи фильтров 2 и 3 и сумматора 5 с понижением частоты проходящих через них сигналов увеличиваются, В спектре автоколебаний появляются гармонические составляющие более высокого порядка, взаимодействие которых в нелинейных цепях устройства с первой гармоникой приводит к изменению фазовых соотношений для последней. Б конечном итоге фазовый сдвиг первой гармоники колебаний отличается от величины, определяемой соотношением (1), и динамический диапазон изменения частоты выходных колебаний уменьшается.
Как показали экспериментальные исследования предлагаемого устройства с амплитудным детектором, реализованным в виде оптоэлектронного датчика перемещений, динамический диапазон изменения частоты выходных колебаний
5
5
0
5
0
5
0
при отсутствии цепи автоматического регулирования амплитуды уменьшился на 23% при фиксированном динамическом
диапазоне измеряемых перемещений, t
Устройство имеет в 3 раза большую крутизну характеристики преобразования чем базовое устройство. Следовательно, оно обладает в 3 раза большей чувствительностью к изменениям измереяемого физического параметра, например силы, давления, перемещения и т.д. Это обусловлено тем, что введение второго фильтра нижних частот, второго фазового звена, амплитудного детектора и аттенюатора позволяет увеличить чувствительность фазо-час- тотной характеристики цепи, образованной параметрическим амплитудно- чувствительным четырехполюсником, двумя фильтрами нижних частот, двумя фазовыми звеньями и сумматором, к изменениям измеряемой физической величины.
Формула изобретения
Частотный преобразователь, содержащий амплитудный датчик, сумматор, первое фазовое звено, выход которого соединен с первым входом сумматора, широкополосный усилитель, выход которого соединен с входом амплитудного датчика и с входом первого фазового звена, и фильтр нижних частот, отличающийся тем, что, с целью повышения чувствительности, в него введены последовательно соединенные амплитудный детектор и аттенюатор, последовательно- соединенные второй фильтр нижних частот, вход которого соединен с выходом первого фильтра нижних частот, и второе фазовое звено, подключенное выходом к второму входу сумматора, выход которого соединен с вторым входом аттенюатора, при этом амплитудный детектор подключен входом к выходу широкополосного усилителя, вход которого соединен с выходом аттенюатора, а выход амплитудного датчика подключен к входу первого фильтра нижних частот.

| название | год | авторы | номер документа |
|---|---|---|---|
| Частотный преобразователь для тензодатчиков | 1985 |
|
SU1270547A1 |
| Пьезоэлектрический датчик давления | 1985 |
|
SU1307255A1 |
| Устройство для контроля селективных усилителей, перестраиваемых по частоте | 1978 |
|
SU773540A1 |
| РЕЛЕЙНЫЙ ПНЕВМОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТЫ | 2007 |
|
RU2337309C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| Многоканальный имитатор канала магнитной записи | 1990 |
|
SU1767529A1 |
| Устройство для измерения скорости и коэффициента затухания ультразвука | 1980 |
|
SU901894A1 |
| Устройство для измерения средней скорости изменения частоты и линейности модуляционных характеристик частотно-модулированных генераторов | 1991 |
|
SU1781632A1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2236669C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
Изобретение относится к контрольно-измерительной технике, в частности к преобразователям электрических сигналов амплитудных датчиков, и может быть использовано в преобразователях для измерения различного рода неэлектрических величин. Цель изобретения - повышение чувствительности устройства за счет увеличения крутизны характеристики преобразования - достигается путем осуществления автоколебаний с частотой, величина и знак отклонений которой относительно ее номинального значения определяются величиной и знаком отклонения коэффициента передачи параметрического амплитудно-чувствительного четырехполюсника (ПАЧЧ) 1, а следовательно, и измеряемой физической величины. Воздействие физической величины вызывает изменение фазового сдвига на выходе цепи, образованной ПАЧЧ 1, двумя фильтрами 2 и 3 нижних частот, двумя фазовыми звеньями 4 и 8 и сумматором 5. При большом коэффициенте усиления широкополосного усилителя 7 в устройстве существуют автоколебания. 1 ил.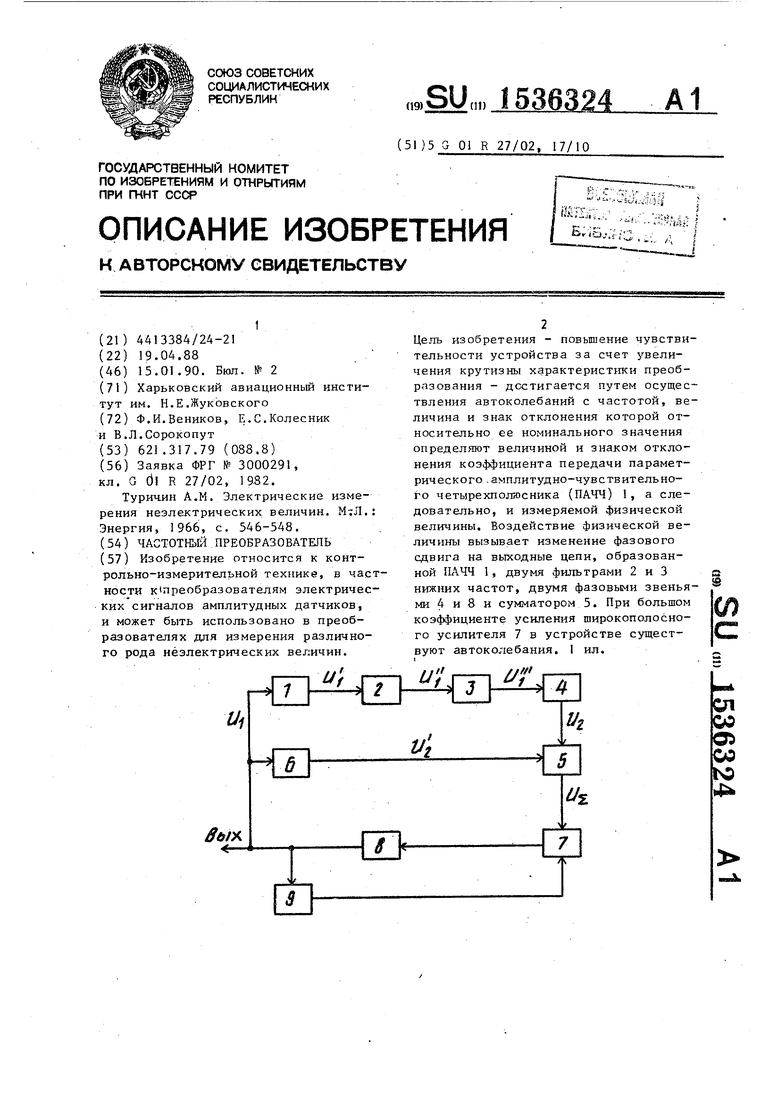
| Заявка ФРГ № 3000291, кл | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Туричин A.M | |||
| Электрические измерения неэлектрических величин | |||
| МтЛ.: Энергия, 1966, с | |||
| ВРАЩАТЕЛЬНЫЙ АППАРАТ С ТУРБИННЫМ ДВИГАТЕЛЕМ ДЛЯ ГИДРАВЛИЧЕСКОГО БУРЕНИЯ СКВАЖИН | 1922 |
|
SU546A1 |
