Предлагаемое изобретение относится к силовым системам управления летательных аппаратов и наиболее целесообразно может быть использовано в рулевых приводах и автопилотах малогабаритных вращающихся по крену управляемых ракет и снарядов.
Рулевой привод получил широкое распространение в системах управления летательных аппаратов в качестве исполнительного механизма автопилота, перемещающего органы управления летательного аппарата в соответствии с требуемым законом управления [1, 2, 3].
Наиболее распространенным типом рулевых приводов в системах управления летательных аппаратов является рулевой привод с жесткой обратной связью по углу поворота органов управления [2, стр. 9, 2-й абзац снизу].
Известен автоколебательный рулевой привод вращающегося по крену управляемого снаряда 9M117 [4]. Он содержит суммирующее устройство, первый вход которого является входом привода и подключен к выходу гирокоординатора ракеты, корректирующий фильтр, нелинейный элемент, выполненный в виде триггерного устройства, усилитель мощности, рулевую машину с управляющим магнитом, датчик обратной связи, связанный с вторым входом суммирующего устройства [4, стр. 15...19, рис. 11].
Отличительной особенностью работы рулевых приводов систем управления вращающихся по крену управляемых ракет и снарядов является отработка гармонического входного сигнала Uвх = Um•sinωвхt с переменными амплитудой Um и частотой ωвх, определяемых соответственно ошибкой рассогласования контура управления ракеты и частотой вращения ракеты по крену (ωвх = ωвр = 2πfвр, где fвр - частота вращения ракеты по крену). Гармонический входной сигнал Uвх поступает на вход привода с выхода гирокоординатора ракеты [4, рис.11].
Для разработки высокоточных вращающихся по крену управляемых ракет и снарядов существующих и вновь разрабатываемых комплексов управляемого вооружения необходимо существенное повышение динамической точности рулевого привода, оцениваемое фазовыми погрешностями (фазовыми сдвигами) отработки гармонических входных сигналов в диапазоне частот вращения (fвр min...fвр max) ракеты для всех уровней амплитуд входного сигнала, соответствующих ≤δm, где δm - максимальный угол отклонения рулей.
К числу известных из теории и практики автоматического регулирования технических мероприятий, направленных на повышение динамической точности работы следящих рулевых приводов, следует отвести следующие:
1. Введение инвариантной связи по управляющему воздействию (входному сигналу) за счет подачи компенсирующего сигнала.
2. Введение инвариантной связи по нагрузке за счет формирования контура по перепаду давления.
3. Повышение добротности по скорости рулевого привода за счет повышения, например, быстродействия элементов привода, введения корректирующих устройств, формирования других законов управления рулевого привода и др.
В практике разработки высокоточных следящих приводов, управляющий сигнал которых изменяется с большими угловыми скоростями и ускорениями, а ограниченная конечная величина добротности по скорости не позволяет обеспечить заданную точность отработки, широкое применение нашли системы [8, 9] с комбинированным управлением (аналог), как существенным эффективным техническим средством решения задачи точности воспроизведения заданного управляющего сигнала.
Принципиальная схема следящего привода (рулевого привода) с комбинированным управлением приведена на фиг.1 [8, стр.85, рис.39; 9, стр.168, рис. 126].
Передаточная функция рулевого привода фиг.1 по ошибке имеет вид [9, стр. 169, выражения 4, 3]
где W1(p) - передаточная функция корректирующего фильтра цепи ошибки,
W2(р) - передаточная функция рулевой машины,
Wк(р) - передаточная функция компенсирующей связи по управляющему воздействию,
Кн - коэффициент передачи линеаризованного релейного элемента РЭ,
W1(p)•W2(p)•Kн - передаточная функция разомкнутого рулевого привода.
Условие полной инвариантности по управляющему воздействию, что соответствует нулевому фазовому сдвигу и коэффициенту передачи с нулевым разбросом рулевого привода при отработке гармонических управляющих воздействий, имеет вид
Для получения полной инвариантности по управляющему воздействию необходимо введение первой и высших производных от этого воздействия, что требует постановки в цепи компенсирующей связи датчиков производных (скорости, ускорения и др.). Кроме того, передаточная функция инерционной части рулевого привода, которой является рулевая машина, существенно зависит от характера нагрузки (пружинная, перекомпенсация). Эти два обстоятельства являются недостатками рулевых приводов с комбинированным управлением, что сдерживает их применение в системах управления малогабаритных управляемых ракет и снарядов.
Для реализации инвариантной связи по нагрузке за счет формирования в рулевом приводе замкнутого контура по перепаду давления необходим малогабаритный датчик давления, удовлетворяющий всем условиям эксплуатации в составе ракеты, необходимы формирование и реализация замкнутого контура по перепаду давления с обеспечением при этом выходных характеристик контура, необходимых с точки зрения точности привода. Для малогабаритных управляемых ракет решение этой задачи пока связано с определенными техническими трудностями.
Известны релейные автоколебательные системы управления для объектов с изменяющимися параметрами [7, стр.233...243]. Отмечено [7, стр.238], что релейный автоколебательный контур как при отсутствии входного воздействия, так и при отработке входного управляющего воздействия вида g(t) = gosinΩt обладает стабильностью характеристик по отношению к изменениям коэффициента усиления объекта управления (линейной части системы).
Однако для обеспечения свойства адаптации при широком изменении параметров объекта управления и при достаточно сложной линейной части возможности автоколебательных систем (имеется в виду с точки зрения точности отработки входных воздействий) весьма ограничены [7, стр.239].
Известен автоколебательный рулевой привод управляемого снаряда, предназначенный для отработки постоянных или медленноменяющихся сигналов управления [5] . Привод содержит сумматор, первый вход которого является входом привода, последовательно соединенные корректирующий фильтр интегродифференцирующего типа с преобладанием интегрирования на частотах автоколебаний, усилитель мощности и рулевую машину, выход которой является выходом привода и соединен через элемент обратной связи с вторым входом сумматора.
Наиболее близким (прототипом) к предлагаемому является известный автоколебательный рулевой привод управляемого снаряда [6]. Привод содержит сумматор, первый вход которого является входом привода, последовательно соединенные корректирующий фильтр, релейный элемент, усилитель мощности и рулевую машину, выход которой является выходом привода и соединен через элемент обратной связи с вторым входом сумматора. Корректирующий фильтр интегродифференцирующего типа выполнен с амплитудным ослаблением и фазовым опережением на частотах автоколебаний.
Из описания изобретения к патенту [6] видно, что описываемый автоколебательный рулевой привод предназначен для отработки гармонического входного сигнала Uвх = Umsinωвхt с переменными амплитудой и частотой, определяемых ошибкой рассогласования контура управления снаряда и частотой вращения снаряда по крену вращающегося по крену управляемого снаряда. Очевидно, хотя на принципиальной схеме рулевого привода [6, фиг.1] это не показано, что для рулевого привода [6], принятого за прототип, также как и для рулевого привода вращающегося по крену управляемого снаряда 9М117 [4], источником гармонического входного сигнала привода является гирокоординатор.
Повышение точности работы в известных автоколебательных рулевых приводах [4, 5, 6] обеспечивается за счет применения в них в цепях ошибки соответствующих корректирующих фильтров.
Недостатком известных автоколебательных рулевых привoдoв [4, 5, 6] является низкая динамическая точность отработки гармонических входных сигналов, оцениваемая по величине фазового сдвига первой гармоники выходного сигнала рулевого привода по отношению к входному.
Требуемый разброс по фазовому сдвигу при отработке этих гармонических входных сигналов рулевым приводом высокоточных управляемых ракет и снарядов должен быть не более ±(4...5)o, что в 2-3 раза меньше достигнутого в настоящее время в существующих одноконтурных автоколебательных рулевых приводах [4, 5, 6]. При этом уменьшенный разброс фазовых сдвигов рулевого привода на частотах вращения ракеты должен быть обеспечен в условиях сравнительно жестких ограничений по габаритно-массовым характеристикам аппаратуры управления ракеты.
За счет разворота оптронных пар или щеток токосъемника гирокоординатора ракеты на угол, противоположный вращению ракеты и равный среднему значению фазового сдвига рулевого привода на центральной частоте вращения ракеты, требование к абсолютной величине фазового сдвига может быть далеко не таким жестким. Такой способ компенсации фазового сдвига известен, например, в управляемом снаряде 9М117 [4].
В существующей структуре рулевых приводов [1...6] не обеспечивается значительное повышение динамической точности отработки гармонических входных сигналов ввиду резкой переменности параметров рулевого привода по времени полета ракеты при сравнительно низкой величине добротности привода по скорости (Д ≅ 150-200/сек) при работе на сжатом воздухе и Д ≅ 300-400/сек при работе на горячем газе от порохового аккумулятора давления, связанной с ограниченным быстродействием рулевого привода.
Возможности существенного повышения добротности по скорости автоколебательного рулевого привода (до 800...10001/сек и более) за счет повышения, например, быстродействия элементов рулевого привода, а также возрастания при этом с увеличением добротности влияния помех на характеристики рулевого привода для повышения динамической точности отработки гармонических входных сигналов автоколебательным рулевым приводом ограничены.
Задачей предлагаемого изобретения является повышение динамической точности отработки гармонических входных сигналов автоколебательным рулевым приводом вращающихся по крену малогабаритных управляемых ракет и снарядов.
Поставленная задача решается за счет того, что в автоколебательный рулевой привод вращающейся по крену управляемой ракеты, содержащий сумматор, первый вход которого является входом привода и подключен к выходу гирокоординатора ракеты, последовательно соединенные корректирующий фильтр, релейный элемент, усилитель мощности и рулевую машину, выход которой является выходом привода и соединен через элемент обратной связи с вторым входом сумматора, введены последовательно соединенные первый блок произведения, сглаживающий фильтр, второй блок произведения и масштабный усилитель, выход которого соединен с дополнительным управляющим входом релейного элемента, первый вход первого блока произведения подключен к выходу сумматора, а вторые входы блоков произведения соединены с выходом опорного напряжения с фазовым опережением 90o нерегулируемой амплитуды гирокоординатора.
Сглаживающий фильтр выполнен с передаточной функцией
где Т - постоянная времени сглаживающего фильтра, выбираемая из условия обеспечения максимального ослабления максимальных амплитуд частоты входного сигнала привода и частоты автоколебаний при обеспечении минимальной инерционности фильтра.
Коэффициент передачи масштабного усилителя выбирается из условия обеспечения минимальных фазовых сдвигов первой гармоники выходного сигнала рулевого привода в диапазоне частот входного сигнала
ωвх = ωвр,
где ωвр = 2πfвр- круговая частота вращения ракеты по крену,
fвр - частота вращения ракеты по крену,
для трех уровней (амплитуд) входного сигнала, соответствующих, например, 1/3, 2/3 и 1,0 максимального угла отклонения рулей, на выбранных расчетных (контрольных) режимах, соответствующих, например, максимальной и минимальной скоростям полета ракеты.
На фиг. 2 представлен автоколебательный рулевой привод вращающейся по крену управляемой ракеты, состоящий из сумматора 1, корректирующего фильтра 2, релейного элемента 3, усилителя мощности 4, рулевой машины 5, элемента обратной связи 6, первого блока произведения 7, сглаживающего фильтра 8, второго блока произведения 9, масштабного усилителя 10, гирокоординатора 11. Uвх - входной гармонический сигнал, δ - угол поворота рулей, Uос - сигнал обратной связи, ΔU - сигнал ошибки, Uocosωt - сигнал опорного напряжения.
Блоки произведения выполнены на микросхемах, например, типа 525ПС2.
Устройство работает следующим образом.
При отсутствии входного сигнала Uвх среднее значение сигнала ошибки ΔU = Uвх-Uос на выходе сумматора 1 (фиг.1) отсутствует, в контуре рулевого привода вследствие отрицательной обратной связи и релейного элемента устанавливаются автоколебания, частота и амплитуда которых определяются параметрами линейной части и релейного элемента. На выходе релейного элемента 3 при этом существуют прямоугольные колебания 50%-ной скважности частоты автоколебаний. Якорь управляющего магнита, поршень рулевой машины и связанные с ним рули колеблются с частотой автоколебаний около нулевого среднего положения. Учитывая, что линейная часть рулевого привода является фильтром низкой частоты, на выходе рулевого привода сигнал частоты автоколебаний имеет форму, близкую к синусоидальной. На выходе корректирующего фильтра 2 амплитуда автоколебаний уменьшается на величину амплитудного ослабления фильтра на частоте автоколебаний, чем достигается увеличение коэффициента передачи релейного элемента для повышения точности рулевого привода [4, 5, 6].
При подаче на вход рулевого привода гармонического входного управляющего сигнала Uвх = Umsinωвхt этот сигнал, как сигнал ошибки ΔU = Uвх-Uоc, который содержит высокочастотную составляющую частоты автоколебаний (30...120 Гц) и низкочастотную гармоническую составляющую частоты входного сигнала (4...14 Гц), поступает на вход корректирующего фильтра 2 и на вход первого блока произведения 7. Каждая из составляющих сигнала ошибки, проходя через корректирующий фильтр и цепочку из последовательно включенных первого блока произведения 7, сглаживающего фильтра 8, второго блока произведения 9 и масштабного усилителя 10 (фиг.2), претерпевает амплитудное и фазовое искажение. Скважность импульсов на выходе релейного элемента 3 в этом случае будет переменной, изменяющейся по гармоническому закону пропорционально низкочастотной составляющей сигнала ошибки. Соответственно якорь магнита, поршень рулевой машины 5 и рули будут отрабатывать величину ошибки рассогласования, тем самым отрабатывая заданный гармонический входной сигнал.
Введение в автоколебательный рулевой привод корректирующего фильтра 2 позволило существенно повысить добротность по скорости рулевого привода за счет увеличения коэффициента передачи релейного элемента, полученного путем ослабления фильтром амплитуды автоколебаний на входе релейного элемента привода. Причем это обеспечивается практически без снижения частоты автоколебаний привода.
Повышение динамической точности (уменьшение фазовых сдвигов) отработки автоколебательным рулевым приводом гармонических входных сигналов Uвх = Um•sinωвхt обеспечивается введением в привод фиг.2 цепи компенсации 12 фазового сдвига в составе первого блока произведения 7, сглаживающего фильтра 8, второго блока произведения 9 и масштабного усилителя 10 с использованием опорного сигнала Uocosωвхt с фазовым опережением 90o нерегулируемой амплитуды частоты вращения ракеты с выхода гирокоординатора ракеты. Входом для цепи компенсации 12 является сигнал ошибки привода. Выходной сигнал компенсации Uк фазового сдвига с выхода цепи компенсации 12 подается на дополнительный управляющий вход релейного элемента 3, знаки сигналов основной ошибки и компенсирующей составляющей на входе релейного элемента одинаковы.
Физический смысл введения компенсирующей связи и ее положительного влияния на повышение динамической точности отработки гармонических входных сигналов рулевым приводом заключается в следующем.
Из теории автоматического регулирования известно, что передаточная функция W(р)системы по сигналу ошибки имеет вид
где Wраз(р) - передаточная функция разомкнутой системы с единичной отрицательной обратной связью [9, стр. 162, рис. 122 и 1-я строка снизу].
Заменяя в выражении для W(р) символ р на jω, получим комплексный коэффициент передачи W(jω) системы (1) по сигналу ошибки
Заданное на вход системы синусоидальное воздействие
X(t) = A•sinωt, (3)
где A, ω = 2πf - амплитуда и угловая частота синусоидального воздействия, вызовет на ее выходе свободные и вынужденные колебания. С течением времени свободные колебания в устойчивой линейной системе затухают, и на ее выходе устанавливаются вынужденные колебания [10, стр. 11...14].
После замены синусоидального воздействия (3) на входе системы комплексной функцией
X*(t) = A•ejωt = Acosωt+jAsinωt, (4)
мнимая часть которой совпадает по форме с реально задаваемым на систему синусоидальным воздействием (3), вынужденные колебания Хв*(t) на ее выходе в комплексной форме определяются уравнением
где W(jω) - комплексный коэффициент передачи системы,
R(ω),ϕ(ω) - модуль и аргумент комплексного коэффициента передачи системы W(jω).
Учитывая, что
ejϕ = cosϕ+jsinϕ,
получим из выражения (5)
Мнимая часть уравнения (6) определяет установившуюся реакцию системы на синусоидальное воздействие, которое на основании (4) представляет собой мнимую часть комплексной функции Х*(t). Следовательно, вынужденные колебания на выходе системы при синусоидальном входном воздействии определяются мнимой частью уравнения (6), т.е.

Задавая на вход системы синусоидальное воздействие (3) и используя соотношения
ϕ(ω) = argW(jω) = ϕв(ω),
можно во результатам измерений установившихся колебаний как на выходе системы, так и на выходе любого из элементов этой системы, в том числе и по сигналу ошибки на выходе сумматора 1 (фиг.2), найти для нее модуль и аргумент комплексного коэффициента передачи (2) при частоте ω. При этом отношение амплитуд колебаний на входе и выходе системы А и Ав определяет модуль комплексного коэффициента передачи системы R(ω), а фазовый сдвиг этих колебаний ϕв(ω) - аргумент ϕ(ω).
Синусоидальные колебания на выходе системы
Xв(t) = R(ω)•A•sin[ωt+ϕ(ω)]
можно также представить в виде суммы синфазной
Xв(синф)(t) = R(ω)•cosϕ(ω)•A•sinωt (8)
и квадратурной
Xв(кв)(t) = R(ω)•sinϕ(ω)•A•cosωt (9)
составляющих.
Представляет практический интерес мнимая часть (квадратурная составляющая) сигнала ошибки для выработки компенсирующего сигнала по фазовому сдвигу в цепи ошибки для повышения динамической точности рулевого привода, для чего разработан предлагаемый автоколебательный рулевой привод вращающейся по крену ракеты с "комбинированным управлением" (фиг.2) с использованием для управления приводом кроме сигнала ошибки регулируемого пропорционально ошибке привода компенсирующего сигнала Uк для управления амплитудой Uо опорного гармонического сигнала с фазовым опережением 90o по сравнению с входным сигналом.
Введенное понятие "комбинированное управление" в этом случае выделено в кавычки с тем, чтобы отличить от классического понятия комбинированного управления, принятого в теории автоматического регулирования и управления для замкнутых систем, как управления по сигналу ошибки и входному управляющему сигналу.
В предлагаемой схеме фиг.2 автоколебательного рулевого привода с помощью первого блока произведения 7 (демодулятора) и сглаживающего фильтра 8 выделяется мнимая часть (квадратурная составляющая) сигнала ошибки привода в диапазоне частот гармонических входных сигналов.
Полученная на выходе сглаживающего фильтра 8 мнимая часть сигнала ошибки привода используется с помощью второго блока произведения 9 (модулятора) для изменения амплитуды Uо опорного сигнала с выхода гирокоординатора ракеты и служит для формирования сигнала компенсации Uк рулевого привода по фазе.
На фиг. 3 приведены логарифмические фазовые и амплитудные частотные характеристики автоколебательного рулевого привода с "комбинированным управлением" с введением сигнала компенсации, пропорционального мнимой части сигнала ошибки рулевого привода, при величине коэффициента передачи масштабного усилителя К=4,2. Характеристики приведены для трех видов максимального шарнирного момента на рулях:
M
Мш m=0
M
для трех значений амплитуд входного сигнала, соответствующих 6o, 12o и 18o угла отклонения рулей (δм = ±18° по упорам) в диапазоне частот 4...16 Гц.
Параметры автоколебаний (частота fа, амплитуда δа) составляли
при Мш m=-11,5 кг•см fа=62 Гц, δа = 6°
при Мш m=0 fа=57 Гц, δа = 8,3°
при Мш m=10 кг•см fа=50 Гц, δа = 11°.
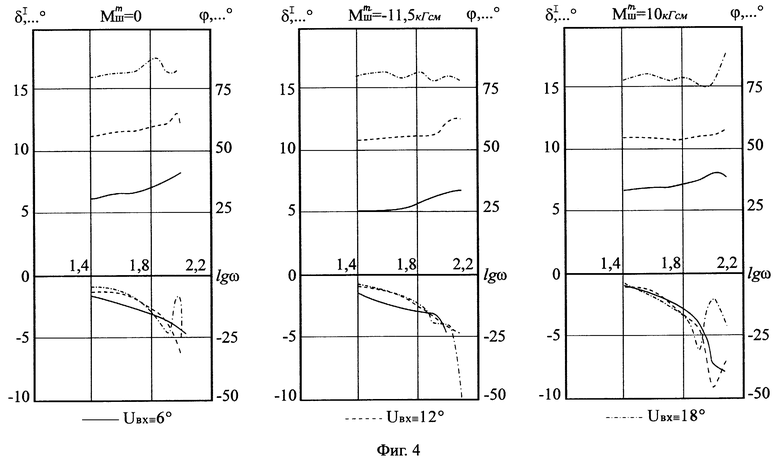
Для сравнения на фиг.4 приведены также фазовые и амплитудные частотные характеристики автоколебательного рулевого привода без введения компенсирующей связи.
Во всех случаях (фиг.3, 4) характеристики привода определялись по первой гармонике выходного сигнала.
Причем на графиках фиг.3, 4 ниже нулевой линии приведены логарифмические фазовые частотные характеристики, выше нулевой линии - амплитудные значения углов отработки.
При введении компенсирующей связи, пропорциональной мнимой части сигнала ошибки рулевого привода, получено существенное улучшение фазовых сдвигов автоколебательного рулевого привода без заметного изменения при этом разброса коэффициента передачи:
при fвх= 4...12 Гц ϕ = -1...5° (вместо -4...24o), К=0,88...1,25 (вместо 0,85...1,25)
при fвх=4...16 Гц ϕ = -1...-8° (вместо -4...-45o), К=0,88...1,30 (вместо 0,84...1,35).
Полученные значения фазовых сдвигов близки к предельной погрешности измерений используемых в настоящее время контрольно-измерительных средств для выделения первой гармоники выходного сигнала автоколебательного рулевого привода.
Инерционной частью рулевого привода фиг.2 с "комбинированным управлением" с использованием мнимой части сигнала ошибки рулевого привода является сглаживающий фильтр, предназначенный для сглаживания пульсаций мнимой части сигнала ошибки, включающей сигналы частоты задаваемого входного сигнала и сигнала частоты автоколебаний привода. Поэтому постоянная времени Т сглаживающего фильтра выбирается из противоречивых условий обеспечения максимального сглаживания этих сигналов при минимальном быстродействии. В результате исследований влияния постоянной времени сглаживающего фильтра на фазовые и амплитудные частотные характеристики рулевого привада установлено, что допустимая постоянная времени должна составлять достаточно малую величину (~ 0,1...0,3 с).
Оценка влияния коэффициента передачи К масштабного усилителя проводилась по фазовым и амплитудным частотным характеристикам рулевого привода при существенном изменении этого коэффициента в сторону увеличения и уменьшения. Выявлено, что наилучшие (наименьшие по абсолютной величине) фазовые сдвиги получаются при большей величине этого коэффициента. Увеличение коэффициента К ~ в 2 раза (К=8,1 вместо 4,2) уменьшает фазовые сдвиги в среднем на 1o, дальнейшее увеличение коэффициента К не приводит к видимому уменьшению фазовых сдвигов.
За счет введения в автоколебательный рулевой привод вращающейся по крену управляемой ракеты предлагаемого технического решения, использующего в качестве компенсирующего сигнала по фазе опорный сигнал с выхода гирокоординатора ракеты с амплитудой, пропорциональной мнимой части сигнала ошибки рулевого привода, удалось обеспечить существенное повышение динамической точности автоколебательного рулевого привода при отработке гармонических входных сигналов на частотах вращения ракеты в широком диапазоне изменения шарнирных нагрузок, частоты и амплитуды автоколебаний. При этом существенно (в несколько раз) уменьшена абсолютная величина фазовых сдвигов рулевого привода в рабочей полосе частот (в диапазоне частот вращения ракеты) 4...16 Гц (получено ϕ<5°, т.е. на уровне инструментальных погрешностей измерения фазового сдвига, вместо ϕ<24o при fвх=4...12 Гц и ϕ<8° вместо ϕ<45° при fвх=4. ..16 Гц), что привело к спрямлению фазовой частотной характеристики рулевого привода и уменьшению разброса фазовых сдвигов на уровне не более ±4,5o без заметного изменения разброса коэффициента передачи.
Таким образом, предлагаемое техническое решение по сравнению с известными позволяет существенно, в 2-3 раза повысить динамическую точность за счет уменьшения в 2...3 раза разброса фазовых сдвигов с ±9...15o до ±4,5o отработки автоколебательным рулевым приводом гармонических входных сигналов на частотах вращения ракеты существующих и вновь разрабатываемых комплексов управляемого ракетного вооружения вращающихся по крену управляемых ракет с использованием доступной элементной базы практически без увеличения массы и габаритов аппаратуры в управляемой ракете.
Источники информации
1. Костин С.В., Петров Б.И., Гамынин H.С. Рулевые приводы. М., Машиностроение, 1973.
2. Крымов Б.Г., Рабинович Л.В., Стеблецов В.Г. Исполнительные устройства систем управления летательными аппаратами. М., Машиностроение, 1987.
3. Пневмопривод систем управления летательных аппаратов. Под общей редакцией В.Л.Чащина. М., Машиностроение, 1987.
4. Автоколебательный рулевой привод управляемого снаряда 9М117. Выстрел ЗУБК 10-1 с управляемым снарядом 9М117. Техническое описание и инструкция по эксплуатации ЗУБК 10.00.000 ТО. М.:Военное издательство, 1987, стр.15...19, рис.11.
5. Патент RU 2079806, F 42 B 15/01, В 64 С 13/36, 22.06.93 г.
6. Патент RU 2114387, F 42 В 15/01, B 64 C 13/36, 29.04.97 г.
7. Принципы построения и проектирования самонастраивающихся систем управления. Петров Б.Н., Рутковский В.Ю., Крутова И.Н., Земляков С.Д. М., Машиностроение, 1972.
8. Менский Б.М. Принцип инвариантности в автоматическом регулировании и управлении. М., Машиностроение, 1972.
9. Сборник задач по теории автоматического регулирования и управления. Под редакцией В. А.Бесекерского. М., Наука, 1978, Система комбинированного управления, рис.125, 126, стр.167-170, задача 211.
10. Вавилов А.А., Солодовников А.И. Экспериментальное определение частотных характеристик автоматических систем. M-Л., ГЭИ, 1963.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2236669C1 |
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ | 2000 |
|
RU2184340C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
| ДВУХКАНАЛЬНЫЙ САМОНАСТРАИВАЮЩИЙСЯ АВТОПИЛОТ ДЛЯ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТЫ | 1999 |
|
RU2177170C2 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АВТОКОЛЕБАТЕЛЬНЫХ РУЛЕВЫХ ПРИВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2145052C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2114387C1 |
| РЕЛЕЙНЫЙ ПНЕВМОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТЫ | 2007 |
|
RU2337309C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2002 |
|
RU2235969C1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |


Изобретение относится к оборонной технике, в частности к управляемым ракетам и снарядам. Технический результат - повышение динамической точности отработки гармонических входных сигналов автоколебательным рулевым приводом вращающихся по крену управляемых ракет и снарядов - достигается за счет того, что в автоколебательный рулевой привод вращающейся по крену управляемой ракеты, содержащий сумматор, первый вход которого является входом привода и подключен к выходу гирокоординатора ракеты, последовательно соединенные корректирующий фильтр, релейный элемент, усилитель мощности и рулевую машину, выход которой является выходом привода и соединен через элемент обратной связи со вторым входом сумматора, введены последовательно соединенные первый блок произведения и сглаживающий фильтр. Введены также второй блок произведения и масштабный усилитель, выход которого соединен с дополнительным управляющем входом релейного элемента, первый вход первого блока произведения подключен к выходу сумматора, а вторые входы блоков произведения соединены с выходом опорного напряжения с фазовым опережением 90o нерегулируемой амплитуды гирокоординатора. 2 з.п. ф-лы, 4 ил.
где Т - постоянная времени сглаживающего фильтра, выбираемая из условия обеспечения максимального ослабления максимальных амплитуд частоты входного сигнала привода и частоты автоколебаний при обеспечении минимальной инерционности фильтра.
ωвх = ωвр,
где ωвр = 2πfвр - круговая частота вращения ракеты по крену;
fвp - частота вращения ракеты по крену,
для трех уровней входного сигнала, соответствующих, например, 1/3, 2/3 и 1,0 максимального угла отклонения рулей, на выбранных расчетных режимах, соответствующих, например, максимальной и минимальной скоростям полета ракеты.
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2114387C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1992 |
|
RU2092784C1 |
| US 5248114 A, 28.09.1993 | |||
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |
| ЕР 0529796 A1, 03.03.1993. | |||

