Предлагаемое изобретение относится к силовым системам управления летательных аппаратов и наиболее целесообразно может быть использовано в пневматических рулевых приводах систем управления ракет, в которых привод является исполнительным элементом систем управления.
Известен релейный пневмопривод, патент RU №2243491 от 27.12.2004 г., с вибрационной линеаризацией систем управления ракет, принятый авторами в качестве ближайшего аналога (прототипа). Он содержит последовательно соединенные сумматор, первый вход которого является входом пневмопривода, релейный элемент, усилитель мощности, нейтральный электромеханический преобразователь с якорем, распределительное устройство и исполнительный двигатель, выход которого является выходом пневмопривода и соединен через датчик обратной связи со вторым входом сумматора. Конструктивно нейтральный электромеханический преобразователь с якорем, распределительное устройство, исполнительный двигатель и датчик обратной связи объединены в один блок, именуемый рулевой машиной.
В известном релейном пневмоприводе вибрационная линеаризация релейного элемента и нелинейностей привода осуществляется путем высокочастотных автоколебаний, возникающих в замкнутом контуре пневмопривода за счет наличия в нем релейного элемента и отрицательной обратной связи по выходной координате (углу отклонения рулей) пневмопривода. Параметры автоколебаний (частота и амплитуда) определяются параметрами входящих в контур пневмопривода элементов.
Известный релейный пневмопривод с вибрационной линеаризацией систем управления ракет относится к объектам с изменяющимися параметрами. В широких пределах по времени полета ракеты изменяются шарнирная нагрузка на рулях (от пружинной до перекомпенсации), из-за изменения скорости и высоты полета ракеты, приводящих к соответствующему изменению скоростного напора (q=ρV2/2) набегающего со скоростью V потока с плотностью ρ, максимальный развиваемый момент и скорость пневмопривода в управляемых ракетах и снарядах, использующих, например, энергию скоростного напора набегающего воздушного потока при полете ракеты и снаряда в диапазоне дозвуковых и сверхзвуковых скоростей, в которых широкое применение нашел не имеющий аналогов в мировой практике вновь созданный новый тип рулевого привода - воздушно-динамический рулевой привод (ВДРП) [2, 3]. В широких пределах изменятся также по времени полета частота входного сигнала за счет переменности частоты вращения ракеты и снаряда и амплитуда входного сигнала, например, на участке ввода ракеты и снаряда в луч управления и на участке управляемого полета.
Отличительной особенностью известного пневмопривода [1, фиг.5] является наличие в контуре пневмопривода слабодемпфированного элемента, а именно исполнительного двигателя.
Недостатком известного релейного пневмопривода с вибрационной линеаризацией систем управления ракет является большая амплитуда автоколебаний рулей (δа), достигающая значений, близких или равных значению максимального угла поворота рулей (δm), определяемого механическими упорами в конструкции пневмопривода.
Большая амплитуда автоколебаний рулей приводит к значительному увеличению лобового сопротивления ракеты и снижению скорости и дальности ее полета. Большая амплитуда автоколебаний рулей может также приводить к уменьшению надежности работы пневмопривода и даже полному отказу из-за снижения механической прочности или полного разрушения механических упоров рулей вследствие воздействия на упоры больших по величине вибрационных нагрузок высокой частоты (частоты автоколебаний fa). Для исключения недостатка в первом случае необходимо увеличивать мощность двигателя, что приведет к увеличению массы и габаритов ракеты. Во втором случае необходимо увеличивать прочность конструкции упоров, что также приведет к увеличению массы ракеты, что не всегда является допустимым, как и в первом случае, особенно для малогабаритных управляемых ракет и снарядов, массогабаритные показатели которых ограничены. Кроме того, в некоторых случаях является недопустимым воздействие вибрационных нагрузок из-за ударов рулей об упоры с частотой автоколебаний на некоторые элементы ракеты, например лазерную полуактивную головку самонаведения в лобовой части ракеты, механические воздействия на которую передаются через корпус ракеты. Это также приводит к необходимости принятия специальных мер по уменьшению вредных механических воздействий на головку самонаведения при работе пневмопривода с большой амплитудой автоколебаний.
Большая амплитуда автоколебаний рулей приводит также к снижению точности работы пневмопривода как в режиме удержания нулевого положения рулей при отсутствии сигнала управления, так и при отработке сигналов управления, из-за уменьшения добротности по скорости пневмопривода или уменьшения коэффициента усиления его разомкнутого контура за счет уменьшения коэффициента передачи по полезному сигналу релейного элемента пневмопривода, величина которого обратно пропорциональна амплитуде автоколебаний на входе релейного элемента.
Как известно, патент RU №2206861 от 20.06.2001 г., наличие большой амплитуды автоколебаний рулей объясняется низкой частотой автоколебаний из-за наличия в контуре пневмопривода слабодемпфированного колебательного звена, которое, в основном, и является определяющим по частоте, а следовательно, и по амплитуде автоколебаний.
Известный релейный пневмопривод [патент RU №2243491, фиг.5] представляет собой замкнутую автоматическую систему, состоящую из двух основных частей: нелинейной части в виде релейного элемента с идеальной статической характеристикой и линейной части. А поскольку линейная часть релейного пневмопривода является фильтром низкой частоты, то уменьшение амплитуды автоколебаний рулей может быть достигнуто путем повышения частоты автоколебаний, конечно, при условии отсутствия резонанса на этой частоте, чего нельзя сказать в отношении пневмопривода, в знаменателе передаточной функции которого имеется колебательное звено [7, с.127, 1-й абзац сверху] с малым коэффициентом демпфирования ξпп<<1.
В источнике информации [7] подробно рассмотрены структурная схема и передаточная функция силового пневмопривода [7, с.124-133] и его частотные характеристики как для отсутствия, так и для наличия знакопеременной шарнирной нагрузки. Построенные логарифмические амплитудно-частотные характеристики (ЛАЧХ) пневмопривода [7, с.139, рис.3.16] имеют характерный для пневмоприводов вид: ярко выраженный резонансный всплеск на частоте ωпп=1/Tпп, где Tпп - постоянная времени колебательного звена передаточной функции пневмопривода.
Следует отметить, что максимальный подъем амплитудной характеристики на частоте ωпп за счет коэффициента демпфирования ξпп составляет Lпп=1/2ξпп. Отсюда следует, что для малых значений коэффициента демпфирования ξпп, например, равных 0,05...0,10, этот подъем весьма значителен.
На величину ξпп сильное влияние оказывает трение, которое всегда присутствует в любом газовом приводе, т.к. сжатый воздух и любой иной газ не обладают смазывающими свойствами в отличие от жидкости [7, с.127-128, 141, 144-145].
Наличие в пневмоприводе лабиринтного уплотнения между поршнем и стенкой силового цилиндра имеет минимальный момент сопротивления поворота рулей, а следовательно, и минимальный коэффициент демпфирования ξпп.
Реально в релейном пневмоприводе [1, фиг.5] частота автоколебаний, как это будет показано ниже, находится вблизи слева от резонансного пика, определяемого частотой ωпп, т.е. в области подъема амплитудной характеристики колебательного звена пневмопривода. Поэтому на амплитуду автоколебаний рулей в этой области очень сильное влияние оказывает коэффициент демпфирования ξпп пневмопривода, т.е. трение в пневмоприводе.
Нахождение частоты автоколебаний вблизи резонансного пика определяется следующими физическими соображениями. В релейном пневмоприводе [1, фиг.5] с идеальной релейной статической характеристикой релейного элемента при отсутствии корректирующих фильтров частота автоколебаний определяется частотой, на которой суммарный фазовый сдвиг исполнительного двигателя и нейтрального электромеханического преобразователя составляет ϕ=-180°. Передаточная функция ненагруженного пневмопривода имеет вид

где δ(p), α(p) - соответственно угол поворота рулей и регулирующего органа нейтрального электромеханического преобразователя, управляющего расходом газа, в операторной форме;
kпп - коэффициент передачи пневмопривода;
τ - время запаздывания нейтрального электромеханического преобразователя;
Tпп, ξпп - соответственно постоянная времени и коэффициент демпфирования пневмопривода.
Из анализа баланса фаз для определения частоты автоколебаний следует, что без учета звена запаздывания суммарный фазовый сдвиг ϕ=-180° будет именно на резонансной частоте, определяемой постоянной времени пневмопривода Tпп из выражения

где Mm - максимальный развиваемый момент пневмопривода;
δm - максимальный угол поворота рулей;
JΣ - суммарный приведенный к оси вращения рулей момент инерции подвижных частей пневмопривода.
На частоте ωпп, определяемой параметрами пневмопривода, фазовый сдвиг ϕ=-180° будет определяться суммой фазовых сдвигов интегрирующего звена (-90°) и колебательного звена на собственной частоте (-90°). Частота автоколебаний ωа будет равна частоте ωпп, т.е. будет находиться на частоте резонанса.
Фазовый сдвиг звена запаздывания с постоянной времени τ будет равен ϕ=ωτ, где ω=2πf - круговая частота.
Учитывая малое значение τ для нейтрального электромеханического преобразователя, фазовый сдвиг звена запаздывания на частотах, близких к частоте ωпп, будет составлять небольшую величину по сравнению с фазовым сдвигом ϕ=-180°, т.е. реально частота автоколебаний будет находиться несколько ниже частоты ωпп, а именно в зоне подъема амплитудной характеристики колебательного звена пневмопривода со всеми вытекающими отрицательными последствиями для амплитуды автоколебаний в сторону ее увеличения.
При наличии знакопеременной шарнирной нагрузки характер рассуждений будет близок к рассмотренному, т.к. в этом случае в знаменателе передаточной функции пневмопривода вместо интегрирующего звена р будет звено (Тр+1) в случае пружинной нагрузки или звено (Тр-1) в случае нагрузки перекомпенсации. Поскольку частоты среза ωср, определяемые соответствующей постоянной времени T (ωср=1/Т) звеньев (Тр+1) и (Тр-1), будут значительно меньше частоты ωпп при выборе максимального развиваемого момента пневмопривода, то в области частоты ωпп фазовый сдвиг от этих звеньев будет близким к ϕ=-90°, т.е. выводы в части частоты автоколебаний будут близки к рассмотренному выше случаю отсутствия шарнирной нагрузки с интегрирующим звеном p в передаточной функции пневмопривода.
Эти соображения подтверждаются анализом логарифмических частотных характеристик рулевого пневмопривода при различных шарнирных нагрузках [7, с.146-147, рис.3.23]: нулевой Кш=0, пружинной Кш>0, перекомпенсации Кш<0. Соответствующие этим нагрузкам логарифмические фазовые частотные характеристики выделены пунктирными линиями, соответствующие им логарифмические амплитудные частотные характеристики - сплошными линиями [7, рис.3.23].
Из анализа фазовых частотных характеристик [7, рис.3.23] следует, что точка пересечения фазовой характеристики пневмопривода с линией ϕ=-180° при пружинной нагрузке (Кш>0) находится немного правее точки пересечения фазовой характеристики пневмопривода с линией ϕ=-180° при нулевой шарнирной нагрузке (Кш=0), а при нагрузке перекомпенсации (Кш<0) - несколько левее. Соответственно и частота автоколебаний в первом случае будет несколько выше по сравнению со случаем нулевой нагрузки, а во втором случае - несколько ниже.
Задачей предлагаемого изобретения является повышение надежности работы пневмопривода и элементов управления ракеты за счет уменьшения воздействия вибрационных нагрузок при работе пневмопривода без увеличения массы и габаритов аппаратуры управления, повышения точности работы пневмопривода за счет уменьшения амплитуды вибрационных колебаний рулей при сохранении высокого быстродействия пневмопривода.
Указанная задача достигается за счет того, что в релейный пневмопривод с вибрационной линеаризацией системы управления ракеты, содержащий сумматор, первый вход которого является входом пневмопривода, и последовательно соединенные релейный элемент, усилитель мощности, нейтральный электромеханический преобразователь с якорем, распределительное устройство и исполнительный двигатель, выход которого является выходом пневмопривода и соединен через датчик обратной связи со вторым входом сумматора, дополнительно введены датчик угла поворота якоря нейтрального электромеханического преобразователя и последовательно соединенные первый корректирующий фильтр, дополнительный сумматор и второй корректирующий фильтр, выход которого подключен к входу релейного элемента, вход первого корректирующего фильтра - к выходу сумматора, а выход нейтрального электромеханического преобразователя через датчик угла поворота якоря соединен с вторым входом дополнительного сумматора.
На фиг.1 представлена принципиальная схема релейного пневмопривода с вибрационной линеаризацией систем управления ракет, на фиг.2, 3 - принципиальные схемы реализации первого и второго корректирующих фильтров соответственно.
Схема (фиг.1) содержит сумматор (С) 1, первый корректирующий фильтр (КФ1) 2, дополнительный сумматор (ДС) 3, второй корректирующий фильтр (КФ2) 4, релейный элемент (РЭ) 5, усилитель мощности (УМ) 6, нейтральный электромеханический преобразователь (НЭМП) 7, распределительное устройство (РУ) 8, исполнительный двигатель (ИД) 9, датчик обратной связи (ДОС) 10, датчик угла поворота якоря нейтрального электромеханического преобразователя (ДУ) 11. Элементы 7-10 конструктивно объединены в один блок - рулевую машину 12 (на схеме показано штрих-пунктирной линией). На схеме обозначены сигналы: Uвх - входной управляющий сигнал, δ - угол поворота рулей, Uδ ос - сигнал обратной связи по углу поворота рулей, Uα ос - сигнал обратной связи по углу поворота якоря нейтрального электромеханического преобразователя.
Устройство работает следующим образом.
При отсутствии входного управляющего сигнала (Uвх=0) в замкнутом контуре по углу поворота якоря нейтрального электромеханического преобразователя вследствие отрицательной обратной связи и релейного элемента устанавливаются автоколебания, частота которых определяется параметрами линейной части и релейного элемента. В данном случае при идеальной статической характеристике частота автоколебаний будет определяться только параметрами линейной части контура. При этом на выходе релейного элемента формируется сигнал прямоугольной формы с 50%-ной скважностью частоты автоколебаний, отрабатываемый якорем нейтрального электромеханического преобразователя.
За счет высокого быстродействия нейтрального электромеханического преобразователя, которое определяется временем срабатывания при перемещении якоря с упора на упор, равным

где tср - время срабатывания от момента поступления сигнала до прихода якоря на упор;
tтр - время трогания от момента поступления сигнала до начала перемещения якоря;
tдв - время движения от начала перемещения якоря до прихода на упор.
Частота автоколебаний в контуре по углу поворота якоря нейтрального электромеханического преобразователя обеспечивается достаточно высокой и составляет 250-300 Гц. Практически частота автоколебаний в этом случае определяется только временем движения якоря, которое составляет 1,5-1,7 мс. Автоколебания на выходе преобразователя имеют форму, близкую к гармонической, с амплитудой, равной максимальному углу поворота якоря.
Учитывая, что линейная часть пневмопривода (в данном случае - исполнительный двигатель) является фильтром низкой частоты, а частота автоколебаний в контуре по углу поворота якоря значительно выше максимальной резонансной частоты пневмопривода ωпп, колебания рулей на выходе пневмопривода будут иметь малую амплитуду ≈1...3°, что существенно меньше по сравнению с амплитудой автоколебаний известного пневмопривода (15...18°).
При наличии на входе пневмопривода входного управляющего сигнала (Uвх≠0) постоянного или гармонического с частотой вращения ракеты по крену сигнал ошибки ΔU=Uвх-Uδ ос на выходе сумматора содержит, кроме высокочастотной составляющей автоколебаний контура по углу отклонения якоря нейтрального электромеханического преобразователя, постоянную или гармоническую составляющую сигнала Uвх. Сигнал этих двух составляющих через первый корректирующий фильтр поступает на первый вход дополнительного сумматора, выход которого в виде сигнала ошибки по углу отклонения якоря преобразователя поступает через второй корректирующий фильтр на вход релейного элемента. Скважность сигнала на выходе релейного элемента из-за наличия в сигнале ошибки постоянной или гармонической составляющей отличается от 50%.
Сигнал с выхода релейного элемента отрабатывается нейтральным электромеханическим преобразователем. Среднее значение выходной координаты (якоря) преобразователя будет пропорционально медленно меняющейся составляющей ошибки сигнала управления. При этом поршень рулевой машины перемещается с амплитудой колебаний (частоты автоколебаний якоря) относительно нулевого положения в соответствии с медленно меняющимся сигналом управления привода (постоянным или гармоническим).
Для повышения точности отработки сигналов управления внутренним контуром по углу отклонения якоря пневмопривода в цепь ошибок этого контура введен корректирующий фильтр КФ2 с передаточной функцией в виде апериодического звена

При отсутствии этого фильтра линеаризация релейного элемента производится большой амплитудой автоколебаний на входе релейного элемента, поскольку якорь колеблется с амплитудой автоколебаний около нулевого положения, как отмечалось выше, равной максимальному углу отклонения якоря. Из-за большой амплитуды автоколебаний на входе релейного элемента коэффициент передачи релейного элемента по полезному сигналу (сигналу управления) составляет незначительную величину, что приводит к большим искажениям при отработке сигнала управления и даже к потере управления.
Для уменьшения амплитуды автоколебаний на входе релейного элемента и повышения точности отработки сигналов управления вводится фильтр с постоянной времени Т, позволяющий существенно уменьшить амплитуду автоколебаний на выходе фильтра, при допустимом некотором снижении частоты автоколебаний за счет увеличения инерционности линейной части внутреннего контура привода. Так, например, без корректирующего фильтра КФ2 частота автоколебаний составляла около 400 Гц при практически полной неработоспособности контура по отработке постоянных, гармонических сигналов, линейно нарастающих сигналов пилообразного и треугольного типов. При введении корректирующего фильтра КФ2 с постоянной времени Т=12 мс частота автоколебаний составила около 300 Гц при обеспечении при этом полной работоспособности внутреннего контура при отработке сигналов управления. Учитывая, что частота среза этого фильтра составляет wср=1/T=83 1/с (или fср=83/6.28=13 Гц), допустимая точность была достигнута за счет уменьшения амплитуды автоколебаний с этим фильтром в 400/13=30 раз.
Фильтр КФ2 реализован на операционном усилителе (микросхема 1401УД2А) по схеме, представленной на фиг.2, где U1, U2 - вход и выход фильтра. Постоянная времени фильтра Т3=RocC, коэффициент передачи в статике К2=Roc/Rвх.
В качестве датчика угла поворота якоря нейтрального электромеханического преобразователя используется малогабаритный бесконтактный малоинерционный или безынерционный датчик. Это может быть как серийно выпускаемый, так и специальной разработки. В данном случае это подробно не рассматривается ввиду непринципиальности для схемы и работы пневмопривода. Главное, должно соблюдаться условие - не нагружать дополнительно якорь преобразователя при минимуме массы и габаритов.
Для повышения добротности по скорости и точности пневмопривода в цепи ошибок пневмопривода введен корректирующий фильтр КФ1 интегродифференцирующего типа с преобладанием интегрирования на высоких частотах (резонансных частотах wпп пневмопривода) с передаточной функцией

Где Т1, Т2 - постоянные времени фильтра с соотношением Т2>Т1;
К1 - статический коэффициент передачи фильтра.
Фильтр позволяет повысить запасы устойчивости контура привода на высоких частотах и тем самым увеличить коэффициент усиления (добротность) разомкнутого контура пневмопривода, а следовательно, повысить статическую и динамическую точности работы пневмопривода.
В рассматриваемом варианте пневмопривода реализован корректирующий фильтр с постоянными времени Т1=6 мс, Т2=12 мс.
Фильтр реализован на операционном усилителе (микросхема типа 1401УД2А) по схеме, приведенной на фиг.3, где U1, U2 - вход и выход фильтра. Постоянные времени фильтра Т1=RдC, Т2=(Roc+Rд)С, коэффициент передачи в статике К1=Roc/Rвх.
Предлагаемый релейный пневмопривод с вибрационной линеаризацией систем управления ракет позволил обеспечить минимальную допустимую амплитуду высокочастотных колебаний рулей при действии на рулях знакопеременной шарнирной нагрузки, наличии в контуре пневмопривода слабодемпфированного исполнительного двигателя с минимальным моментом сопротивления повороту рулей с лаборинтным типом управления между поршнем и стенкой силового цилиндра, при изменении в широких пределах по времени полета ракеты максимальных развиваемого момента и скорости пневмопривода, величины шарнирной нагрузки на рулях при использовании энергии сжатого воздуха набегающего воздушного потока в воздушно-динамических рулевых приводах, уменьшить лобовое сопротивление ракеты и увеличить тем самым дальность полета ракеты, повысить надежность работы пневмопривода и элементов системы управления ракеты, таких как лазерная полуактивная головка самонаведения, за счет уменьшения воздействия вибрационных нагрузок при работе пневмопривода, повысить точность работы пневмопривода за счет уменьшения амплитуды вибрационных колебаний рулей при сохранении высокого быстродействия пневмопривода.
Проведенные проверки и испытания опытных образцов предлагаемого релейного пневмопривода с вибрационной линеаризацией за счет высокочастотных автоколебаний в замкнутом контуре по углу поворота якоря нейтрального электромеханического преобразователя как автономно, так и в составе управляемой ракеты с лазерной полуактивной головкой самонаведения подтвердили с положительными результатами эффективность заложенного технического решения.
Таким образом, предлагаемое техническое решение по сравнению с известным позволило повысить технико-экономические показатели релейных приводов с вибрационной линеаризацией систем управления ракет и ракет в целом практически без заметного увеличения массы и габаритов аппаратуры управления и двигательной установки, обеспечить работоспособность и требуемые показатели работы релейного пневмопривода с вибрационной линеаризацией с простым, надежным и быстродействующим нейтральным электромеханическим преобразователем, с вновь разрабатываемым простым, надежным лаборинтным типом уплотнения между поршнем и стенкой силового цилиндра с минимальным сопротивлением углу поворота рулей и слабым демпфированием пневмопривода, обеспечить работу пневмопривода в широком диапазоне входных давлений сжатого воздуха и шарнирных нагрузок в управляемых ракетах и снарядах, использующих энергию торможения набегающего воздушного потока при их полете в широком диапазоне скоростей полета.
Источники информации
1. Патент RU №2243491 от 27.12.2004 г.
2. Патент RU №2258898 от 20.08.2005 г.
3. Патент RU №2218548 от 10.12.2003 г.
4. Патент RU №2172927 от 27.08.2001 г.
5. Патент RU №2206058 от 10.06.2001 г.
6. Патент RU №2206861 от 20.06.2001 г.
7. Б.Г.Крылов, Л.В.Рабинович, В.Г.Стеблецов Исполнительные устройства систем управления летательными аппаратами. - М., Машиностроение, 1987 г., стр. 116, рис. 3.4, стр.8, 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ | 2000 |
|
RU2184340C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С АВТОКОЛЕБАТЕЛЬНЫМ ПРИВОДОМ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ | 2010 |
|
RU2435131C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2218549C2 |
| Способ пропорционального управления воздушно-динамическим рулевым приводом ракеты и устройство для его реализации | 2016 |
|
RU2630462C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2236669C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2536838C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |


Изобретение относится к оборонной технике, к управляемым ракетам и снарядам и может быть использовано в пневматических рулевых приводах систем управления ракет и снарядов. Технический результат - уменьшение амплитуды колебаний рулей рулевого пневмопривода при действии на рулях знакопеременной шарнирной нагрузки, наличии в контуре слабодемпфированного звена в виде исполнительного двигателя с минимальным моментом сопротивления повороту рулей с лабиринтным типом уплотнения между поршнем и стенкой силового цилиндра, повышение точности работы. Релейный пневмопривод содержит последовательно соединенные сумматор, первый вход которого является входом пневмопривода, релейный элемент, усилитель мощности, нейтральный электромеханический преобразователь с якорем, распределительное устройство и исполнительный двигатель, выход которого является выходом пневмопривода и соединен через датчик обратной связи со вторым входом сумматора. Пневмопривод также содержит датчик угла поворота якоря нейтрального электромеханического преобразователя и последовательно соединенные первый корректирующий фильтр, дополнительный сумматор и второй корректирующий фильтр, выход которого подключен к входу релейного элемента, вход первого корректирующего фильтра - к выходу сумматора, а выход нейтрального электромеханического преобразователя через датчик угла поворота якоря соединен с вторым входом дополнительного сумматора. 3 ил.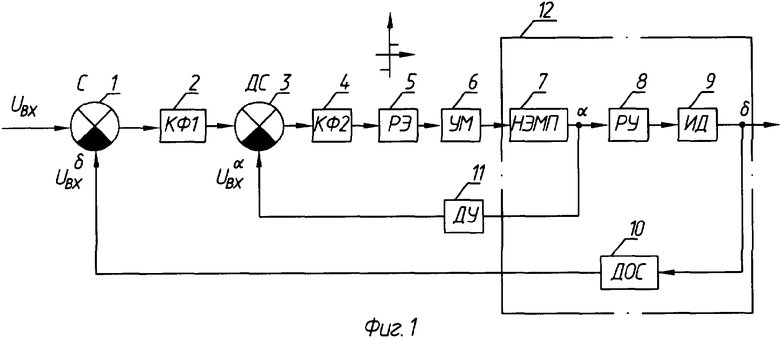
Релейный пневмопривод с вибрационной линеаризацией системы управления ракеты, содержащий сумматор, первый вход которого является входом пневмопривода, и последовательно соединенные релейный элемент, усилитель мощности, нейтральный электромеханический преобразователь с якорем, распределительное устройство и исполнительный двигатель, выход которого является выходом пневмопривода и соединен через датчик обратной связи со вторым входом сумматора, отличающийся тем, что в него введены датчик угла поворота якоря нейтрального электромеханического преобразователя и последовательно соединенные первый корректирующий фильтр, дополнительный сумматор и второй корректирующий фильтр, выход которого подключен к входу релейного элемента, вход первого корректирующего фильтра - к выходу сумматора, а выход нейтрального электромеханического преобразователя через датчик угла поворота якоря соединен со вторым входом дополнительного сумматора.
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2114387C1 |
| US 5248114 А, 28.09.1993 | |||
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |

