Изобретение относится к измерителной технике и может быть использовано для контроля углов оптических призм.
Целью изобретения является повышение точности контроля за счет усреднения погрешности лимба в пределах 360°.
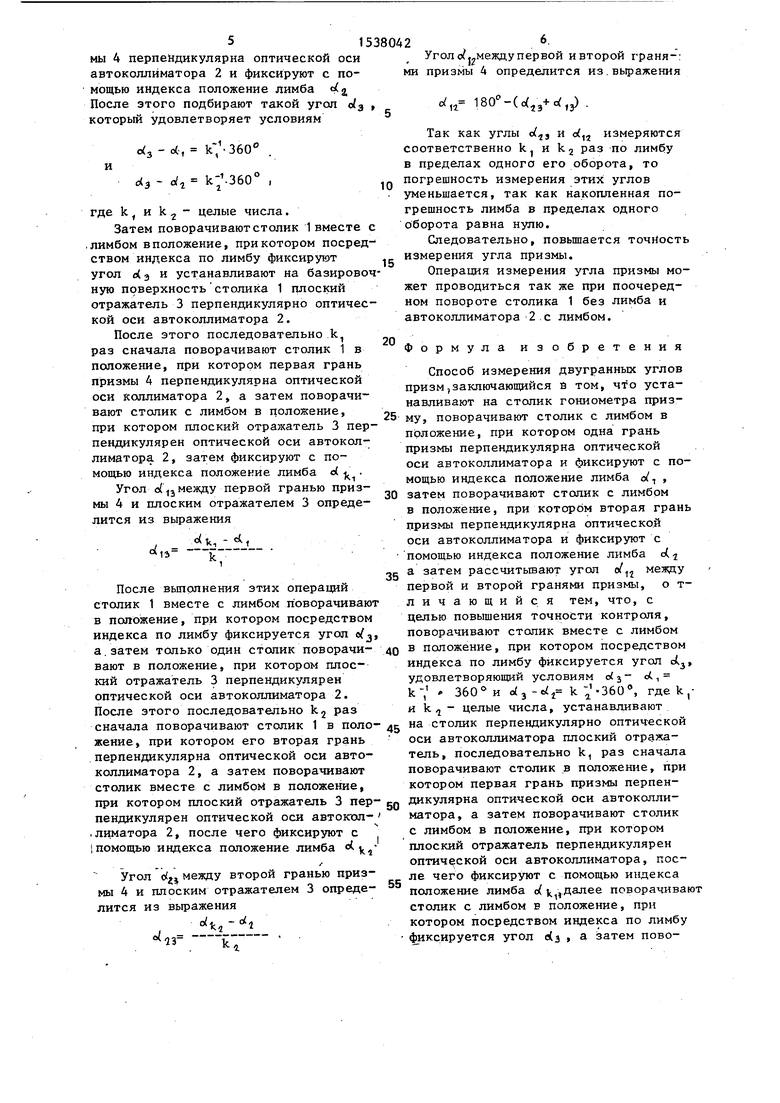
На чертеже представлена функциональная схема устройства, реализующего предлагаемый способ.
Устройство, реализующее предлагаемый способ, содержит столик 1 гониометра, установленный с возможностью поворота вокруг оси, перпендикулярной базировочной поверхности столика индекс (не показан), лимб (не показан), автоколлиматор 2, оптическая ось которого перпендикулярна оси поворота столика 1 гониометра, плоский отражатель 3, установленный на столике 1 так, что его отражающая плос0
5
0
5
кость параллельна оси поворота столика 1 . Столик 1 выполнен с возможностью поворота как вместе с лимбом, так и без него.
Автоколлиматор 2 выполнен с возможностью поворота вокруг оси поворота столика 1 вместе с лимбом. На базировочную поверхность столика 1 понио- метра устанавливают контролируемую призму 4 так, что ее рабочие грани параллельны оси поворота столика 1.
Устройство, реализующее предлагаемый способ, работает следующим образом.
Поворачивают столик 1 вместе с лимбом в положение, при кот ором одна грань контролируемой призмы 4 перпендикулярна оптической оси автоколлиматора 2, и фиксируют с помощью индекса положения лимба о. Затем поворачивают чстолик 1 с лимбом в положение, при котором вторая грань приз515380426
мы 4 перпендикулярна оптической оси, Угол о междупервой и второй граня-1
автоколлиматора 2 и фиксируют с по-ми призмы 4 определится из выражения
мощью индекса положение лимба d% После этого подбирают такой угол da , который удовлетворяет условиям®
п 180°-и„+ 1Э).
-1
- d, k, -360
и
э - г k 1.360
где k( и k 2 - целые числа.
Затем поворачивают столик 1 вместе с .лимбом вположение, при котором посред ством индекса по лимбу фиксируют угол d$ и устанавливают на базировоч ную поверхность столика 1 плоский отражатель 3 перпендикулярно оптической оси автоколлиматора 2.
После этого последовательно kt раз сначала поворачивают столик 1 в положение, при котором первая грань призмы 4 перпендикулярна оптической оси коллиматора 2, а затем поворачи
Способ измерения двугранных угло призм,заключающийся в том, что уста навливают на столик гониометра при
вают столик с лимбом в положение, ос,.
5 му, поворачивают столик с лимбом в при котором плоский отражатель 3 пер- тм „тм- „„„„ „„„„„
пендикулярен оптической оси автоколположение, при котором одна грань призмы перпендикулярна оптической оси автоколлиматора и фиксируют с п мощью индекса положение лимба d , 30 затем поворачивают столик с лимбом в положение, при котором вторая гра призмы перпендикулярна оптической оси автоколлиматора и фиксируют с помощью индекса положение лимба d
лиматора 2, затем фиксируют с помощью индекса положение лимба d .
1
Угол о(1э между первой гранью призмы 4 и плоским отражателем 3 определится из выражения
.:А
cU
После выполнения этих операций столик 1 вместе с лимбом поворачивают в положение, при котором посредством индекса по лимбу фиксируется угол (3,
35
а затем рассчитывают угол eln между первой и второй гранями призмы, о т- личающийся тем, что, с целью повышения точности контроля, поворачивают столик вместе с лимбом а.затем только один столик поворачи- 40 в положение, при котором посредством вают в положение, при котором штос- индекса по лимбу фиксируется угол А3, кий отражатель 3 перпендикулярен оптической оси автоколлиматора 2.
После этого последовательно k2 раз и k - целые числа, устанавливают сначала поворачивают столик 1 в поло- 45 на столик перпендикулярно оптической жение, при котором его вторая грань оси автоколлиматора плоский отража- перпендикулярна оптической оси авто- тель, последовательно k, раз сначала коллиматора 2, а затем поворачивают поворачивают столик в положение, при столик вместе с лимбом в положение, котором первая грань призмы перпен- при котором плоский отражатель 3 пер- сп Дикулярна оптической оси автоколлиуд овлетворяющий условиям 0(3 « i
360° и о(3 -df k -ЗбО0, rflek,50
пендикулярен оптической оси автокод-
.лиматора 2, после чего фиксируют с | помощью индекса положение лимба v.
Угол otjjj между второй гранью призмы 4 и плоским отражателем 3 опреде- °5 лится из выражения
матора, а затем поворачивают столик с лимбом в положение, при котором плоский отражатель перпендикулярен оптической оси автоколлиматора, после чего фиксируют с помощью индекса положение лимба d ,далее поворачивают столик с лимбом в положение, при котором посредством индекса по лимбу фиксируется угол d , а затем пово-«
°Чз
п 180°-и„+ 1Э).
Так как углы dt3 и измеряются соответственно kj и k2 раз по лимбу в пределах одного его оборота, то погрешность измерения этих углов уменьшается, так как накопленная погрешность лимба в пределах одного оборота равна нулю.
Следовательно, повышается точность измерения угла призмы.
Операция измерения угла призмы может проводиться так же при поочередном повороте столика 1 без лимба и автоколлиматора 2 с лимбом.
Формула изобретения
Способ измерения двугранных углов призм,заключающийся в том, что устанавливают на столик гониометра приз,.
му, поворачивают столик с лимбом в тм „тм- „„„„ „„„„„
положение, при котором одна грань призмы перпендикулярна оптической оси автоколлиматора и фиксируют с помощью индекса положение лимба d , затем поворачивают столик с лимбом в положение, при котором вторая грань призмы перпендикулярна оптической оси автоколлиматора и фиксируют с помощью индекса положение лимба di
а затем рассчитывают угол eln между первой и второй гранями призмы, о т- личающийся тем, что, с целью повышения точности контроля, поворачивают столик вместе с лимбом в положение, при котором посредством индекса по лимбу фиксируется угол А3,
уд овлетворяющий условиям 0(3 « i
360° и о(3 -df k -ЗбО0, rflek,матора, а затем поворачивают столик с лимбом в положение, при котором плоский отражатель перпендикулярен оптической оси автоколлиматора, после чего фиксируют с помощью индекса положение лимба d ,далее поворачивают столик с лимбом в положение, при котором посредством индекса по лимбу фиксируется угол d , а затем поворачивают столик в положение, при котором плоский отражатель перпендикулярен оптической оси автоколлиматора, после чего последовательно k, раз поворачивают столик в положение, при котором вторая грань призмы перпендикулярна оптической оср автоколлиматора , а затем поворачивают столик с лимбом в положение, при котором
а, и
15380428
плоский отражатель перпендикулярен оптической оси автоколлиматора, после чего фиксируют посредством индекса положение лимба определяют из
k2 зависимости
а
« «180
4.(чсЛ«.
AuL) Ь, }
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля гониометров в режиме измерения пирамидальности | 1986 |
|
SU1557453A1 |
| Устройство для контроля двугранных отражателей | 1990 |
|
SU1778518A1 |
| Способ аттестации пентагонального блока | 1988 |
|
SU1597535A1 |
| Устройство аттестации пентагонального блока | 1985 |
|
SU1295213A1 |
| СПОСОБ ИЗМЕРЕНИЯ ДВУГРАННЫХ УГЛОВ ЗЕРКАЛЬНО-ПРИЗМЕННЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2523736C1 |
| Способ контроля измерительной системы угла поворота | 1987 |
|
SU1525450A1 |
| Способ контроля углов призм и двугранных отражателей | 1990 |
|
SU1755044A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИЗГОТОВЛЕНИЯ ДВУХГРАННЫХ УГЛОВ ЗЕРКАЛЬНО-ПРИЗМЕННЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2010 |
|
RU2431801C1 |
| Способ определения ориентировки плоских неоднородностей показателя преломления в прозрачных монокристаллах | 1982 |
|
SU1140082A1 |
| Гониометр | 1976 |
|
SU616530A1 |
Изобретение относится к измерительной технике и может быть использовано для контроля углов оптических призм. Целью изобретения является повышение точности контроля за счет усреднения погрешности лимба в пределах 360°. На базировочную поверхность столика 1 гониометра устанавливают контролируемую призму 4 так, что ее рабочие грани параллельны оси поворота столика 1. Поворачивают столик 1 вместе с лимбом /на чертеже не указан/ в положение, при котором одна грань контролируемой призмы 4 перпендикулярна оптической оси автоколлиматора 2 и фиксируют посредством индекса положение лимба α1. Затем поворачивают столик 1 с лимбом в положение, при котором вторая грань призмы 4 перпендикулярна оптической оси автоколлиматора 2 и фиксируют с помощью индекса положение лимба α2. После этого подбирают такой угол α3, который удовлетворяет условиям α3-α1=K1.360° и α3-α2=K2.360°, где K1 и K2 - целые числа. Затем поворачивают столик 1 вместе с лимбом в положение, при котором посредством индекса по лимбу фиксируется угол α3 и устанавливают на базировочную поверхность столика 1 плоский отражатель 3 перпендикулярно оптической оси автоколлиматора 2. После этого последовательно K1 раз сначала поворачивают столик 1 в положение, при котором первая грань призмы 4 перпендикулярна оптической оси автоколлиматора 2, а затем поворачивают столик с лимбом в положение, при котором плоский отражатель 3 перпендикулярен оптической оси автоколлиматора 2, затем фиксируют с помощью индекса положение по лимбу *98Ния глубиНЕ МОдуляции РАзНОСТи фАз гАРМОНичЕСКиХ СигНАлОВ. 2 ил.B.A.пОдОляНА.E.КОНдРАХиНА621.317.39:531.717и ХОлОдОпРОизВОдиТЕльНОСТи K дРугОй ВКлючАюТ B РЕжиМЕ шиРОТНО-иМпульСНОй МОдуляции дОпОлНиТЕльНый КОМпРЕССОР.B.B.дОбРОТВОРцЕВг.ю.бЕльСКАя621.56ОдКлючЕН K пРиЕМНОй пОлОСТи КАМЕРы чЕРЕз КлАпАН, пОдпРужиНЕННый ОТНОСиТЕльНО КОРпуСА B OCEBOM КАНАлЕ ВТулКи, A КАНАл ОТВОдА пОдКлючЕН K дОзиРующЕй пОлОСТи КАМЕРы. 1 ил.B.B.гРишКОВО.C.СТЕНиНА621.891.43.038.5ляЕТ СНизиТь РАСХОд изВЕСТи B29.114.302.2.004.55798
яшиН СЕРгЕй АфАНАСьЕВич
КОпАНЕВ ВячЕСлАВ ТиХОНОВич+7504304DEVICE FOR MEASURING ANGLES11 300004 ТулА11 300027 ТулА, МЕТАллуРгОВ 45г-5
11 300008 ТулА, гОРьКОгО 10-70
11 300040 ТулА, МичуРиНА 137-9Изобретение относится к измерительной технике. Ц
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Описание, инструкция и методика измерений по ГОСТ 5-557-70, с | |||
| Пишущая машина | 1922 |
|
SU37A1 |
