ел
CD
СЛ
со
сл
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля ошибки прямого угла зеркально-призменных элементов | 1989 |
|
SU1633277A1 |
| Способ определения погрешности изготовления прямого угла зеркально-призменных элементов | 1989 |
|
SU1774162A1 |
| Устройство аттестации пентагонального блока | 1985 |
|
SU1295213A1 |
| Автоколлиматор | 1980 |
|
SU1076861A1 |
| Способ определения погрешностей изготовления прямых двугранных углов зеркально-призменных элементов и устройство для его осуществления | 1977 |
|
SU693110A1 |
| СПОСОБ ИЗМЕРЕНИЯ ДВУГРАННЫХ УГЛОВ ЗЕРКАЛЬНО-ПРИЗМЕННЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2523736C1 |
| Способ измерения углов,образуемых тремя гранями призмы,и устройство для его осуществления | 1985 |
|
SU1250848A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИЗГОТОВЛЕНИЯ ДВУХГРАННЫХ УГЛОВ ЗЕРКАЛЬНО-ПРИЗМЕННЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2010 |
|
RU2431801C1 |
| Устройство для измерения плоского угла | 1972 |
|
SU494599A1 |
| Способ измерений угловых параметров уголкового отражателя и устройство для его осуществления | 2018 |
|
RU2697436C1 |
Изобретение относится к измерительной технике и может быть использовано для контроля пентагональных блоков. Целью изобретения является повышение точности контроля за счет исключения влияния погрешности установки плоских отражателей на результаты аттестации. Платформу 2 поворачивают вокруг оси, перпендикулярной оптической оси автоколлиматора 1, до получения в поле зрения автоколлиматора 1 изображения автоколлимационной марки, соответствующей отражению пучка лучей автоколлиматора 1 от пентагонального блока 6 и плоского отражателя 4, после чего снимают отсчет α1 по шкале автоколлиматора 1. Затем поворачивают столик 5 вместе с пентагональным блоком 6 на 90°, получают в поле зрения автоколлиматора 1 изображение автоколлимационной марки, соответствующей отражению пучка лучей автоколлиматора 1 от пентагонального блока 6 и плоского отражателя 3, и снимают отсчет α2 по шкале автоколлиматора 1. Далее платформу 2 поворачивают вокруг оси, перпендикулярной оптической оси автоколлиматора, примерно на 180° до получения в поле зрения автоколлиматора 1 изображения автоколлимационной марки, соответствующей оптической связи автоколлиматора 1 через пентагональный блок 6 с плоским отражателем 4, и снимают отсчет α3 по шкале автоколлиматора 1. Затем поворачивают столик 5 на 90°, при этом автоколлиматор 1 будет оптически связан через пентагональный блок 6 с плоским отражателем 3, и снимают отсчет α4 по шкале автоколлиматора 1. Угол δ отклонения пентагонального блока от 90° рассчитывают по формуле δ=(Α2-Α1)+(Α4-Α3)/8. 2 ил.
повышение точности контроля за счет исключения влияния погрешности установки плоских отражателер на результаты аттестации. Платформу 2 пово- рачивают вокруг оси, перпендикуляр- ней оптической оси автоколлиматора 1 до получения в поле зрения автоколлиматора 1 изображения автоколлимационной марки, соответствующей отра- жению пучка лучей автоколлиматора 1 от пентагонального блока 6 и плоского отражателя 4, после чего снимают отсчет с по шкале автоколлиматора 1. Затем поворачивают столик 5 вместе с пентагональным блоком 6 на 90 , получают в поле зрения автоколлиматора 1 изображение айтоколлима- ционной марки, соответствующей отражению пучка лучей автоколлиматора 1 от пентагонального блока 6 и плоско
Изобретение относится к измерительной технике и может быть использовано для контроля пентагрнальных блоков.
Целью изобретения является повышение точности контроля за счет устранения влияния погрешности установки плоских отражателей на результаты аттестации.
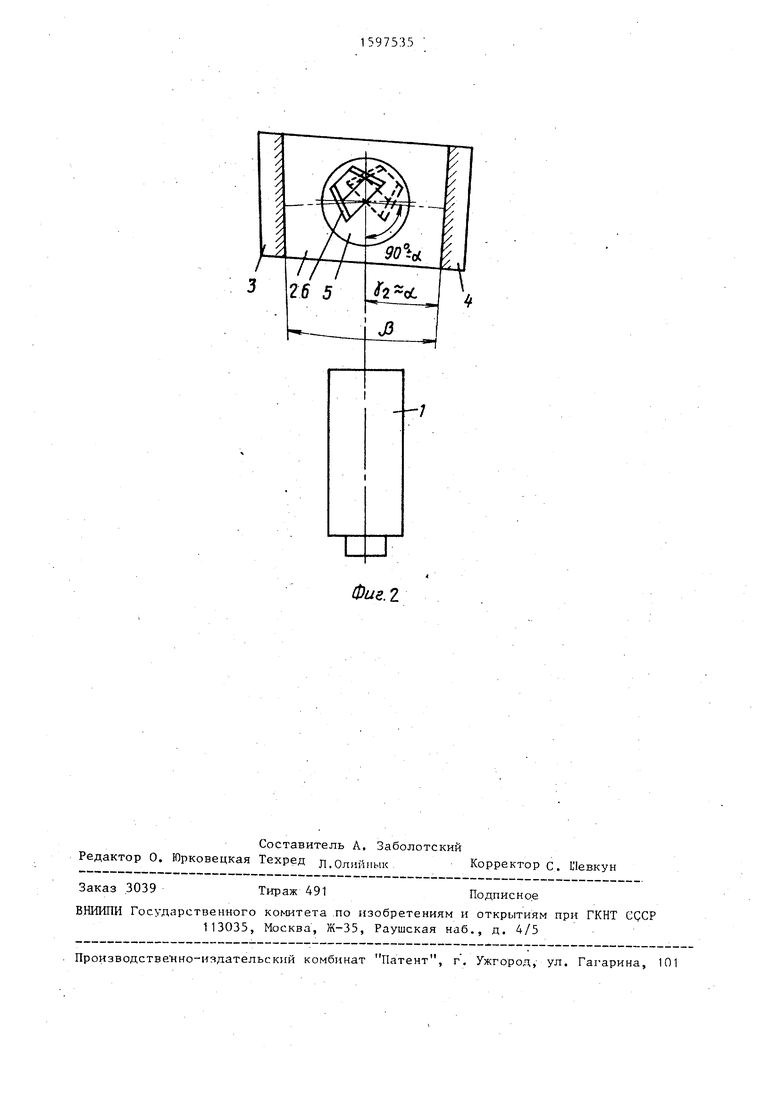
На фиг. 1 и 2 представлена функциональная схема устройства, реализующего способ аттестацш пентагонального блока, при двух положениях плоских отражателей.
Устройство содержит (фиг. 1) основание (не показано), автоколлиматор 1 л естко скрепленный с основанием, платформу 2, установленную на основании с возможностью поворота оси, пер- пендикулярной оптической оси автоколлиматора 1, два плоских отражателя 3 И; 4, установленные на платформе 2 по разные стороны от оси ее поворота так, что нормали к ним перпендикулярны оси поворота платформы 2 и образуют между собой угол д, столик 5, ,:установленньп1 между плоскими отражателями 3 и 4 с возможностью поворо- та вокруг оси, совпадающей с осью поворота платформы 2. Контролируемый пентагональньсй блок 6 устанавливают на столик 5. Величина угла должна удовлетворять следующему условию:
го отражателя 3, и снимают отсчет по шкале автоколлиматора 1. Далее платформу 2 поворачивают вокруг оси перпендикулярной оптической оси автоколлиматора, примерно на 180 . до получения в поле зрения автоколлиматора 1 изображения автоколлимационной марки, соответствующей оптическо связи автоколлиматора 1 через пента- гональньй блок 6 с плоским отражателем 4, и снимают отсчет о по шкале автоколли атора 1 . Затем поворачивают столик 5 на 90 , при этом автоколлиматор 1 будет оптически связан через пентагонапьный блок 6 с плоским отражателем 3, и снимают отсчет (/4 по шкале автоколлиматора 1. Угол сГ отклонения пентагонального блока от 90 ° рассчитывают по формуле f (oil- of,) + ( )/8. 2 ил.
с| /2 -у-Ско
0
0
с
0
где (1 - угол поля зрения автоколлиматора 11
И - угол между оптической осью автоколлиматора 1 и одним из плоских отражателей 3 и 4; микс предельное значение откло- нения угла пентагонального блока от 90 .
I Способ осуществляется следующим образом.
Контролируемьй пентагональньй блок. 6 ориентируют на столике 5 так, чтобы один из его отражателей был оптически связан с автоколлиматором 1 , Параллельньй пучок лучей автколли- матора 1 последовательно отражается от пентагонального блока 6 (фиг. 1), плоского отражателя 4, затем опять от пентагонального блока 6 и попадает в автоколлиматор 1. Снимают по шкале автоколлиматора 1 угловой отсчет 0/ . Затем поворачивают столик 5 вместе с пентагональным блоко.м 6 на 90°,, при этом с автоколлиматором 1 оптически связан второй отражатель пентагонального блока 6. R этом случае параллельный пучок лучей авто- коллиматора 1 последовательно отражается от пентагонального блока 6, плоского отражателя 3, затем опять от
пентагонального блока 6 и попадает в автоколлиматор 1. Снимают по шкале автоколлиматора 1 угловой отсчет о.
Для первого положения пентагонального блока сгграведливо следующее соотношение:
где - отклонение угла пентагонального блока 6 от -jf, - угол между оптической осью автоколлиматора 1 и плоским отражателем 4.
Для второго положения пентагонального блока 6 справедливо следующее соотношение:
2 y,-f 2/5 с(.
где - угол между плоскими отражателями 4 и 3. Из этих двух соотношений получают
(-) - 2/3. .
Далее платформу 2 поворачивают примерно на 180 до получения в поле зрения автоколлиматора 1 изображения автоколлимационной марки, соответствующей отражению пучка лучей автоколлиматора 1 от пентагонального блока 6 и плоского отражателя 4, и снимают отсчет с/2 по шкале автоколлиматора 1. Затем поворачивают столик
5на 90 , получают в поле зрения автоколлиматора 1 изображение автоколлимационной марки, соответствую- i щей отражению пучка лучей автокод- лиматора 1 от пентагонального блока
6и плоского отражателя 3, и снимают отсчет 0/ по шкале автоколлиматора 1.
Для такого положения плоских отражателей 3 и 4 справедливо соотношение
- Г() -ь 2/5 .
Из двух полученных вьфажений для сг можно исключить угол уЗ тогда получим
-g- (г-Ч) +( Из полученного вьфажения следует, что угол между плоскими отражателями 3 и 4 не влияет на результаты измерения.
о
Таким образом, предложенный способ позволит исключить, влияние погрешности установки угла между плоскими отражателями 3 и 4 tia результаты измерения и тем самым повысить точность
аттестации пентагонального блока 6. Формула изобретения
10
Способ аттестации пентагонального блока, заключающийся в том, что . устанавливают пентагональный блок между двумя плоскими отражателями, j направляют параллельньп пучок лучей черея пентагональный блок на первый отражатель и фиксир тот угол d направления пучка лучей на выходе пентагонального блока после отражения 20 от первого отражателя, затем поворачивают пентагональный блок в положение, при котором параллельный пучок лучей через пентагональный блок падает на второй отражатель, и фикси- 25 руют угол 0/2 направления пучка лучей на: выходе пентагонального блока после отражения от второго отражателя, а затем рассчитывают угол пентагонального блока, отличающийся тем, что, с целью повышения точности контроля, отражатели, установленные под заданным углом друг к другу, поворачивают на 180 вокруг оси, параллельной оси поворота пентагонального блока, после чего поворачивают пентагональный блок в положение, при котором параллельньй пучок лучей через лентагональный отражатель падает на первый отражатель, и фиксируют угол с/з направления пучка лучей на выходе пентагонального блока после его отражения от первого отражателя, затем поворачивают пентагональный блок в-положение, при котором параллельный -пучок лучей, через пентагональ30
35
40
45
0
ный отражатель падает на второй отражатель, и фиксируют угол о. направления пучка лучей на выходе пентагонального блока после его отражения от второго отражателя и рассчитывают угол отклонения f пентагонального блока от 90 ° по форщше
rf -о/О -I- (с/4-с/О
8
Фиг.2
| Устройство для аттестации пентагонального блока | 1978 |
|
SU696284A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
