1
(21)4351503/24-09г
(22)28,12,87
(46) 23.01.90. Бюл. № 3
(72) А.Г. Чистяков и В.Г0 Литвинович
(53)621.395о664 (088.8)
(56)Авторское свидетельство СССР
№ 907822, кл„.Н 04 В 3/04, 22.04.80.
(54)УСТРОЙСТВО АДАПТИВНОЙ КОРРЕКЦИИ
(57)Изобретение относится к технике связи. Цель изобретения - расширение диапазона допустимых начальных искажений сигнала,, Устр-во адаптивной коррекции содержит трансверсальный фильтр 1, состоящий из линии задержки 2, регуляторов 3 и сумматора 4, а
также блок настройки 5, состоящий из решающего блока 6, блока управления 7 режимом, эл-та 8 выделения знака ошибки, эл-та 9 выделения знака сигнала, регистров 10, 11, 14 и 15 сдвига, сумматора 12 по модулю два, ключей 13 и эл-тов ИЛИ 16. Устр-во работает в режимах обучения слежения. Режим работы определяется сигналом управления, поступающим на блок управления 7. Режим обучения используется при наличии сильных искажений сигнала на входе корректора. В режим слежения корректор переходит после того, как искажения сигнала на выходе сумматора 4 снизятся до величины, обеспечивающей нормальную работу в этом режиме. 4 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство адаптивной коррекции | 1980 |
|
SU907822A1 |
| Устройство адаптивного приема многопозиционных дискретных сигналов | 1986 |
|
SU1478342A1 |
| ДУПЛЕКСНЫЙ МОДЕМ | 1998 |
|
RU2147791C1 |
| Программируемый трансверсальный фильтр | 1980 |
|
SU881985A1 |
| АДАПТИВНОЕ УСТРОЙСТВО ПОИСКА И СЛЕЖЕНИЯ ЗА ЗАДЕРЖКОЙ ШИРОКОПОЛОСНОГО СИГНАЛА | 1990 |
|
RU2040856C1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| АДАПТИВНОЕ УСТРОЙСТВО ПОИСКА И СЛЕЖЕНИЯ ЗА ЗАДЕРЖКОЙ ШИРОКОПОЛОСНОГО СИГНАЛА | 1990 |
|
RU2037978C1 |
| Трансверсальный фильтр | 1981 |
|
SU1083344A1 |
| АДАПТИВНОЕ УСТРОЙСТВО ПОИСКА И СЛЕЖЕНИЯ ЗА ЗАДЕРЖКОЙ ШИРОКОПОЛОСНОГО СИГНАЛА | 1991 |
|
RU2040858C1 |
| Тренажер для обучения сварщиков | 1986 |
|
SU1441446A1 |
Изобретение относится к технике связи. Цель изобретения - расширение диапазона допустимых начальных искажений сигнала. Устройство адаптивной коррекции содержит трансверсальный фильтр 1, состоящий из линии задержки 2, регуляторов 3 и сумматора 4, а также блок настройки 5, состоящий из решающего блока 6, блока управления 7 режимом, эл-та 8 выделения знака ошибки, эл-та 9 выделения знака сигнала, регистров 10, 11, 14 и 15 сдвига, сумматоров 12 по модулю два, ключей 13 и эл-тов ИЛИ 16. устройство работает в режимах обучения и слежения. Режим работы определяется сигналом управления, поступающим на блок управления 7. Режим обучения используется при наличии сильных искажений сигнала на входе корректора. В режим слежения корректор переходит после того, как искажения сигнала на выходе сумматора 4 снизятся до величины, обеспечивающей нормальную работу в этом режиме. 4 ил.
«Сйй
Л Г
Уар
rfel
&#/
Sufi
-
ел
со
00
ю ел
Изобретение относится к технике ±вязи и может быть использовано в цистемах передачи данных
Целью изобретения является расшире-5 к °ДНОМУ из выходов решающего блока
нне диапазона допустимых начальных Искажений сигнала,,
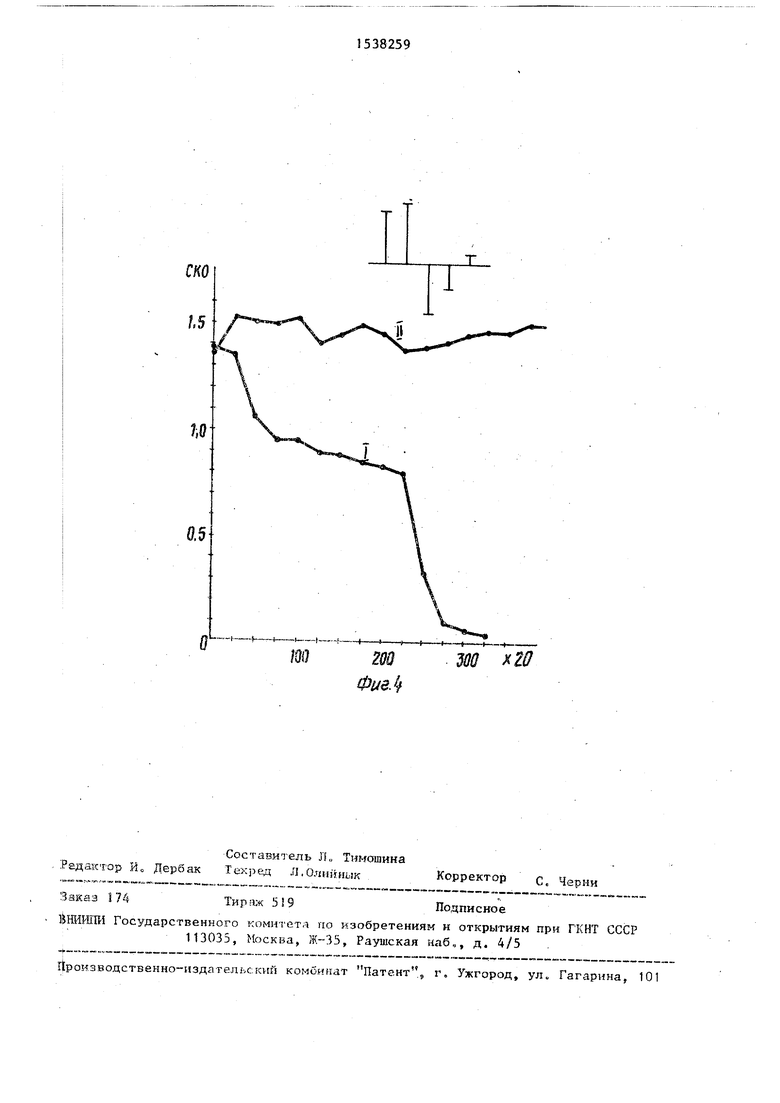
На фиг.1 представлена структурная электрическая схема предлагаемого устройства; на фигс2 - решающий блок; 10 на фиг„3 - блок управления режимом; на фиг.4 - диаграмма работы устройства (зависимость среднеквадратической ошибки на выходе устройства от числа циклов подстройки),15
Устройство адаптивной коррекции (фиг.1} содержит трансверсальный фильтр 1, состоящий из линии 2 задержки с элементами 2
6, к второму выходу, который является одним из выходов устройства, под ключен второй вход элемента 8 выделе ния знака ошибки
Входы сумматоров 1 2,,, „ „, , 1 2 n+ m+1 по модулю два соединены с соответствующими выходами элемента 8 выделения знака ошибки и элемента 9 выделения знака сигнала. Выходы первого 10 и второго 11 регистров сдвига подключены к соответстствующим вхо-«
дам сумматоров 12
1
.,12
по
и
1 fltmt(
отводами регуляторов 3,,.„,, ,3„«.тм и
20
сумматора 4, блок 5 настройки, сос- т|эящий из решающего блока 6, блока 7 управления режимом, элемента 8 выделения знака ошибки, элемента 9 выделения знака сигнала, первого ре- 25 щстра сдвига на п разрядов 10,,.„0, 10П, второго регистра сдвига на m разрядов 11.,,..,, 1 „,, (п+га+1 ) сумматоров 12 ,,,„., 12 П4т+1 по модулю два,
модулю два, выход каждого из которых подключен к входу соответствующего кл ча 13,, о. ., I 3 „„,,,„. Один из вхбдов блока 7 управления режимом объединен с соответствующим входом (п + 1)-го регулятора 3nt,H является управляющим входом устройства Один из выходов блока 7 управления режимом соединен с входом третьего регистра сдвига на m разрядов 14,,„.,14„, вход и выходы которого подключены к соответствующим входам логических
(n+m-t 1 ) ключей 1 3 ,, „ о о, 1 3 h4mt,, треть-зд элементов ИЛИ 16 ,, „ о ,, 16niB +), выход
регистра сдвига на га разрядов
14 ,о.,14т, четвертого регистра сдви
35
40
га на п разрядов 15, ,„.,, 1 5„, (n+m+1) лЬгических элементов ИЛИ 16,,...,
Н+ 14+ I
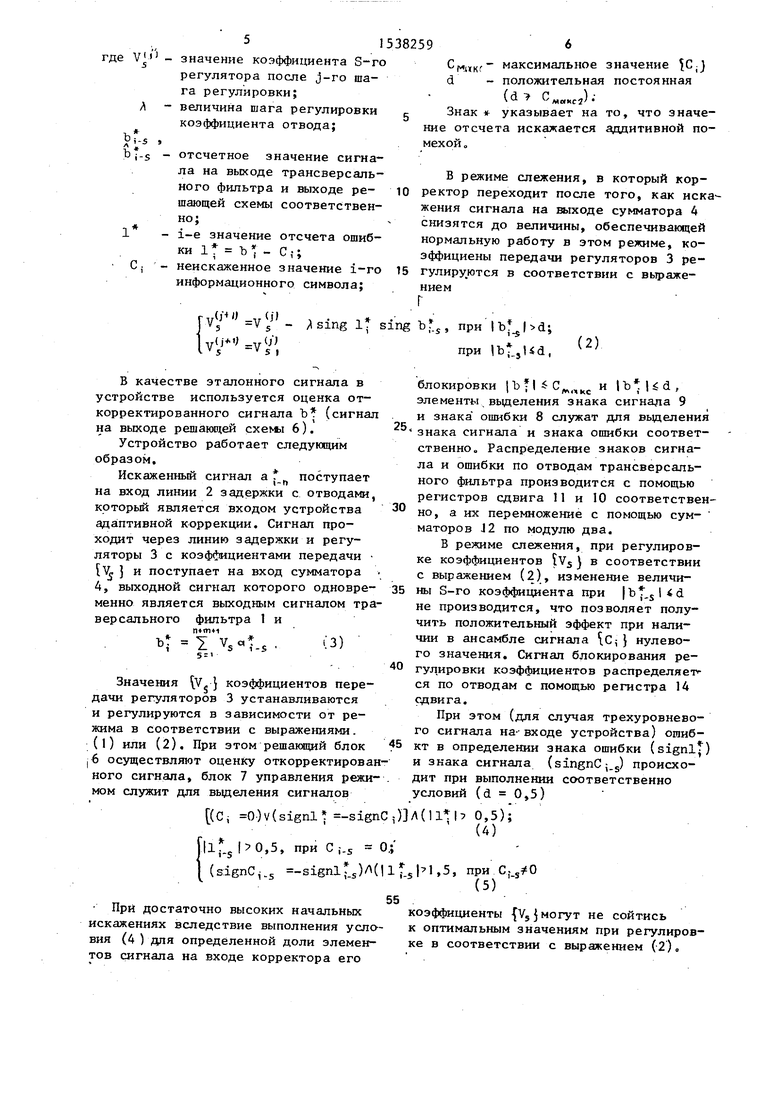
Решающий блок 6 (фиг„2) содержит источник 17 эталонных сигналов, компараторы 18, и 18„, аналоговые ключи 10, и 19г сумматор 20.
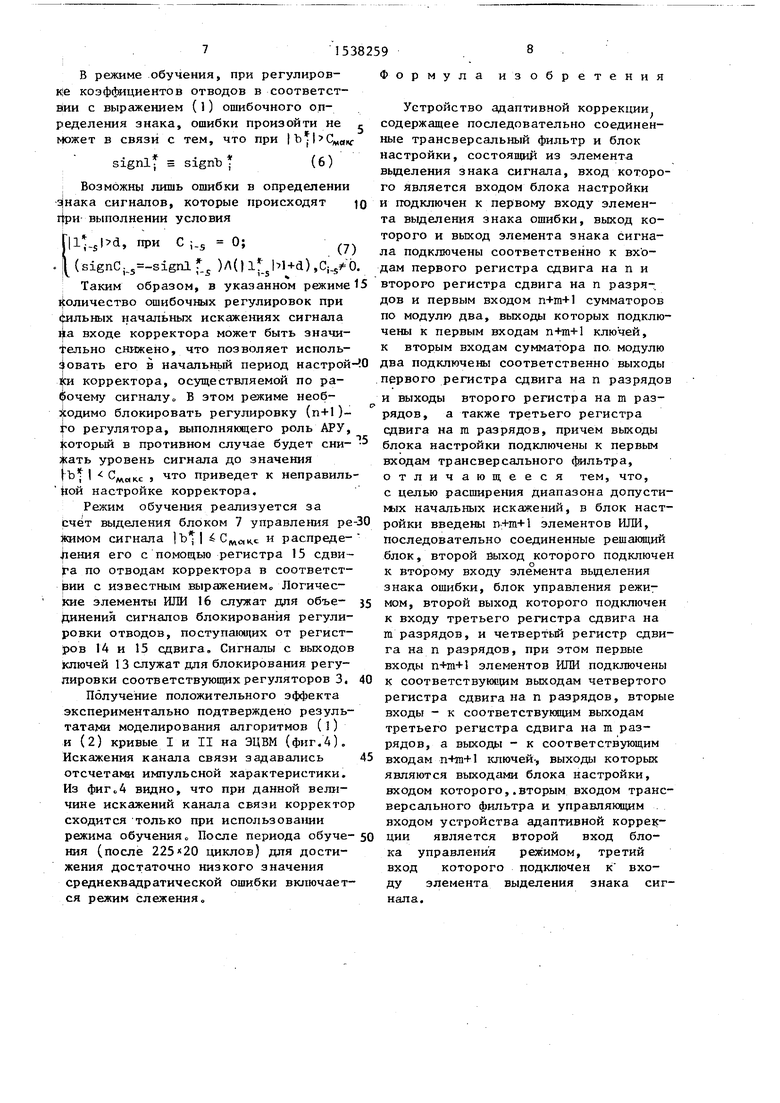
Блок 7 управления режимом (фиг„3) содержит компараторы 21 .,-2)4 аналоговые ключи 22 т и 22г, сумматоры 23, и 23г, инвертор 24, элемент И 25.
Элементы выделения знака ошибки 8 и выделения знака сигнала 9 выполнены на компараторах.
Трасверсальный фильтр 1} вход которого является входом устройства, состоит из линии 21,. о „ ,2 )+, задержки с отводами, каждый из послед-- них через соответствующий регулятор . 3,,... ,3П4П14, подключен к входу сумматора 4, выход которого соединен с в кодами решающего блока 6, блока 7 управления режимом, элемента 8 выкаждого из которых соединен с управляющим входом соответствующего ключа 13,,..., 13 п+т.,о Второй выход блока 7 управления режимом соединен с выходом четвертого регистра сдвига на п разрядов 15 ,,...,15„, вход и выходы которого подключены к другому входу соответствующего элемента ИЛИ 16,,.„„,16п+гт,. Выход каждого ключа 13,,. „ о, 13 „,.„,.,, соединен с вторым входом соответствующего регулятора 3 ,, „. о, 3„+п,+,трансверсального фильтра 1,
Устройство-может работать в ,режи- 45 мах обучения и слежения Режим работы определяется сигналом управления, поступающим на управляющий вход блок 7 управления режимом.
В режиме обучения, который используется при наличии сильных искажений сигнала на входе корректора, коэффициенты передачи регуляторов трансверсального фильтра регулируются в соответствии с выражением
Vst)f11 V( - A sign 1 sign , при ) Смвкс),(, j гОч v(j)при (iTvsUdMlt) С«««Ь
деления знака ошибки, элемента 9 выделения знака сигнала Второй вход блока 7 управления режимом подключен,
к °ДНОМУ из выходов решающего блока
6, к второму выходу, который является одним из выходов устройства, подключен второй вход элемента 8 выделения знака ошибки
Входы сумматоров 1 2,,, „ „, , 1 2 n+ m+1 по модулю два соединены с соответствующими выходами элемента 8 выделения знака ошибки и элемента 9 выделения знака сигнала. Выходы первого 10 и второго 11 регистров сдвига подключены к соответстствующим вхо-«
дам сумматоров 12
1
.,12
по
модулю два, выход каждого из которых подключен к входу соответствующего ключа 13,, о. ., I 3 „„,,,„. Один из вхбдов блока 7 управления режимом объединен с соответствующим входом (п + 1)-го регулятора 3nt,H является управляющим входом устройства Один из выходов блока 7 управления режимом соединен с входом третьего регистра сдвига на m разрядов 14,,„.,14„, вход и выходы которого подключены к соответствующим входам логических
каждого из которых соединен с управляющим входом соответствующего ключа 13,,..., 13 п+т.,о Второй выход блока 7 управления режимом соединен с выходом четвертого регистра сдвига на п разрядов 15 ,,...,15„, вход и выходы которого подключены к другому входу соответствующего элемента ИЛИ 16,,.„„,16п+гт,. Выход каждого ключа 13,,. „ о, 13 „,.„,.,, соединен с вторым входом соответствующего регулятора 3 ,, „. о, 3„+п,+,трансверсального фильтра 1,
Устройство-может работать в ,режи- мах обучения и слежения Режим работы определяется сигналом управления, поступающим на управляющий вход блока 7 управления режимом.
В режиме обучения, который используется при наличии сильных искажений сигнала на входе корректора, коэффициенты передачи регуляторов трансверсального фильтра регулируются в соответствии с выражением
51538259
де Vj J - значение коэффициента S-ro регулятора после j-ro шага регулировки;
Л - величина шага регулировки коэффициента отвода;
максимал d - положите (d С ,„
К- .
ЬГ-s Знак # указыва ние отсчета искаж мехой о
отсчетное значение сигнала на выходе трансверсаль- ного фильтра и выходе ре- ю шающей схемы соответственно;
1-е значение отсчета ошибки 1 Ъ - С,-; неискаженное значение 1-го 15 информационного символа;
,/+« «Ф
В режиме слежен ректор переходит п жения сигнала на в снизятся до величи нормальную работу эффициены передачи гулируются в соотв нием Г
V;J - sing I sing bfs, при r( V0 J
V
s i
при I b 5 U d,
В качестве эталонного сигнала в устройстве используется оценка откорректированного сигнала Ь (сигнал на выходе решающей схемы 6).
Устройство работает следующим образом.
Искаженный сигнал а п поступает на вход линии 2 задержки с отводами, который является входом устройства адаптивной коррекции. Сигнал проходит через линию задержки и регуляторы 3 с коэффициентами передачи {у. } и поступает на вход сумматора 4, выходной сигнал которого одновременно является выходным сигналом тра версального фильтра 1 и
1 V9«.. -О)
Ч
Значения У. } коэффициентов передачи регуляторов 3 устанавливаются и регулируются в зависимости от режима в соответствии с выражениями. (l) или (2). При этом решающий блок |-6 осуществляют оценку откорректированного сигнала, блок 7 управления режимом служит для выделения сигналов
(С, 0)v(signl -signC,)A( 0,5);
(4)
,5, при C,-.s 0.;
(sienC,.s -signltsHULl7l 5, при C.
При достаточно высоких начальных искажениях вследствие выполнения условия (4 ) для определенной доли элементов сигнала на входе корректора его
максимальное значение fCJ d - положительная постоянная (d С ,„„«.,).
Знак # указывает на то, что значение отсчета искажается аддитивной помехой о
В режиме слежения, в который корректор переходит после того, как искажения сигнала на выходе сумматора 4 снизятся до величины, обеспечивающей нормальную работу в этом режиме, ко- эффициены передачи регуляторов 3 регулируются в соответствии с выражениемГ
при
при I b 5 U d,
(2)
5
блокировки (,ke и , элементы выделения знака сигнала 9 и знака ошибки 8 служат для выделения
0
5
знака сигнала и знака ошибки соответственно,, Распределение знаков сигнала и ошибки по отводам трансверсаль- ного фильтра производится с помощью регистров сдвига 11 и 10 соответственно, а их перемножение с помощью сумматоров J2 по модулю два.
В режиме слежения, при регулировке коэффициентов ivs) в соответствии с выражением (2), изменение величины S-ro коэффициента при |b.slid не производится, что позволяет получить положительный эффект при наличии в ансамбле сигнала нулевого значения. Сигнал блокирования регулировки коэффициентов распределяет ся по отводам с помощью регистра 14 сдвига.
При этом (для случая трехуровневого сигнала на- входе устройства) огаиб- 5 кт в определении знака ошибки (signl) и знака сигнала (singnC; s) происходит при выполнении соответственно условий (d 0,5)
0
55
коэффициенты {V5$ могут не сойтись к оптимальным значениям при регулировке в соответствии с выражением (2)0
В режиме обучения, при регулировке коэффициентов отводов в соответствии с выражением (1) ошибочного определения знака, ошибки произойти не может в связи с тем, что при
signlf signb (6)
Возможны лишь ошибки в определении з(нака сигналов, которые происходят щж выполнении условия
Г|1 5|:м1, при 0;()
. (signC -signlf )A(ur.sl l+d),
Таким образом, в указанном режиме Количество ошибочных регулировок при фильных начальных искажениях сигнала входе корректора может быть значи- снижено, что позволяет исполь- овать его в начальный период настройки корректора, осуществляемой по ра- рочему сигналу В этом режиме необ- одимо блокировать регулировку (п+1)- t o регулятора, выполняющего роль АРУ, Который в противном случае будет сни- зрать уровень сигнала до значения I CMOKC а что приведет к неправиль- |гой настройке корректора.
Режим обучения реализуется за счет выделения блоком 7 управления режимом сигнала СМО(к,с и распредеЧтения его с помощью регистра 15 сдви- ра по отводам корректора в соответствии с известным выражением.. Логические элементы ИЛИ 16 служат для объе- динения сигналов блокирования регулировки отводов, поступающих от регистров 14 и 15 сдвига. Сигналы с выходов ключей 13 служат для блокирования регулировки соответствующих регуляторов 3.
Получение положительного эффекта экспериментально подтверждено результатами моделирования алгоритмов (1) и (2) кривые I и II на ЭЦВМ (фиг.4)„ Искажения канала связи задавались
отсчетами импульсной характеристики. Из фиг„4 видно, что при данной величине искажений канала связи корректор сходится только при использовании режима обучения о После периода обучения (после циклов) для достижения достаточно низкого значения среднеквадрэтической ошибки включается режим слежения.
Формула изобретения
Устройство адаптивной коррекции содержащее последовательно соединенные трансверсальный фильтр и блок настройки, состоящий из элемента выделения знака сигнала, вход которого является входом блока настройки и подключен к первому входу элемента выделения знака ошибки, выход которого и выход элемента знака сигнала подключены соответственно к входам первого регистра сдвига на п и второго регистра сдвига на п разрядов и первым входом п+п+1 сумматоров по модулю два, выходы которых подключены к первым входам п+га+1 ключей, к вторым входам сумматора по модулю два подключены соответственно выходы первого регистра сдвига на п разрядов и выходы второго регистра на m разрядов, а также третьего регистра сдвига на m разрядов, причем выходы блока настройки подключены к первым входам трансверсального фильтра, отличающееся тем, что, с целью расширения диапазона допустимых начальных искажений, в блок настройки введены гИ-m+l элементов ИЛИ, последовательно соединенные решающий блок, второй выход которого подключен к второму входу элемента выделения знака ошибки, блок управления режимом, второй выход которого подключен к входу третьего регистра сдвига на m разрядов, и четвертый регистр сдвига на п разрядов, при этом первые входы n+m+1 элементов ИЛИ подключены к соответствующим выходам четвертого регистра сдвига на п разрядов, вторые входы - к соответствующим выходам третьего регистра сдвига на m разрядов, а выходы - к соответствующим входам n-hn+1 ключей-, выходы которых являются выходами блока настройки, входом которого,.вторым входом транс- версального фильтра и управляющим входом устройства адаптивной коррекции является второй вход блока управления режимом, третий вход которого подключен к входу элемента выделения знака сигнала.
ь8ых- 7)
(ИИ Ц)
Фие.2
(Г
Ж W
Фив-k
