Изобретение относится к автома- тическому регулированию преимущественно энергетических газотурбинных установок (ГТУ).
Цель изобретения - повышение надежности работы системы, и,, как следствие, повышение надежности и эффективности автоматического пуска и нагружения ГТУ, а также обеспечение работы ГТУ в автоматическом режиме с предельной выходной мощностью с наилучшими экономическими показателями при широких изменениях внешних условий.
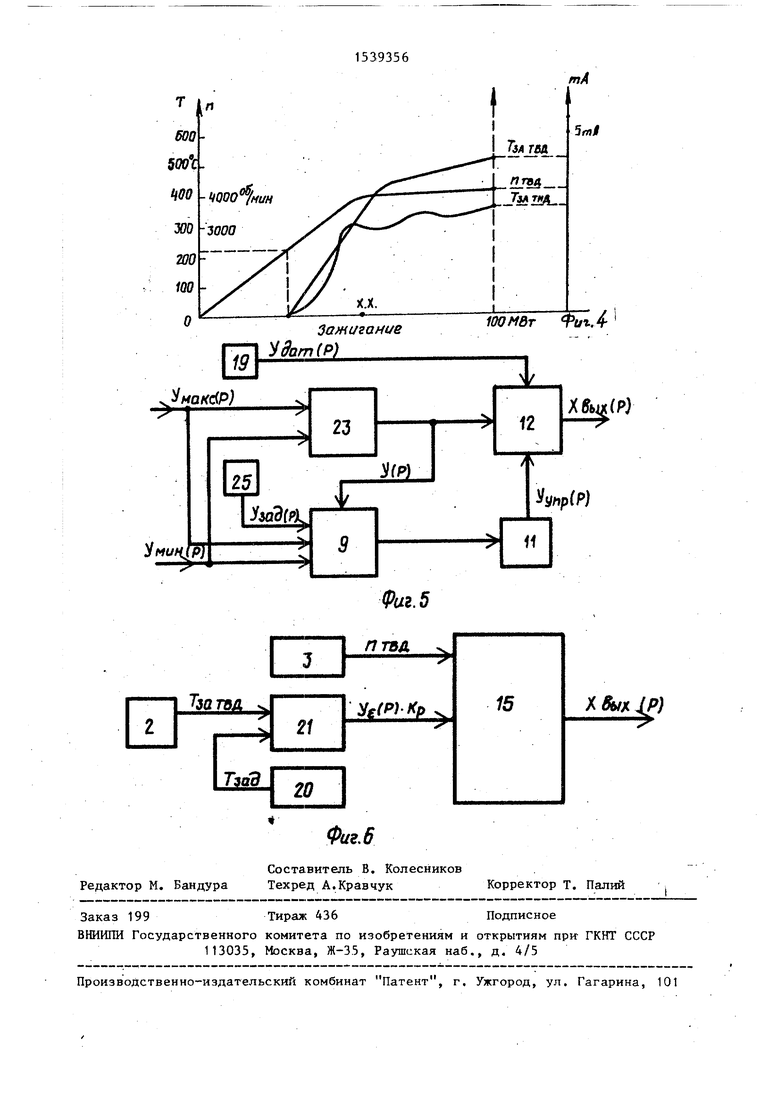
На фиг.1 представлена структурная схема системы автоматического управления газотурбинной установкой; на фиг.2 - схема работы программного задатчика с блоком выделения минимального сигнала; на фиг.З - график формирования сигнала текущего задания; на фиг.4 - график зависимости сигналов текущего параметра от режима работы ГТУ (типа ГТ-100); на фиг,5 - блок-схема совместной работы аналого-регулирующего блока, ре- лейно-импульсного регулятора и электрического блока регулирования турбины низкого давления (ТНД); на фиг.6 - схема совместной работы ограничителя температуры газов за турбиной высокого давления (ТВД) и электрического блока регулирования ТВД. Система автоматического управления газотурбинной установкой (фиг.1) содержит последовательно соединенные датчик 1 температуры газов за
турбиной высокого давления (ТВД) и первый преобразователь 2,. последовательно соединенные датчик 3 скорости вращения ротора турбины высокого давления и второй преобразователь 4, последовательно соединенные датчик 5 температуры газов за турбиной низкого давления (ТНД) и третий преобразователь 6, програм- ный задатчик 7, релейный автомат
8 пуска и нагружения с нормально замкнутыми и нормально разомкнутыми контактами, последовательно соединенные релейно-импульсный регулятор 9 пуска и нагружения, блок 10 управления, механизм 11 управления,электрический блок 12 регулирования турбины низкого давления, первый электромеханический преобразователь 13 и сервомотор 14 подачи топлива в камеру сгорания турбины низкого давления, последовательно соединенные электрический блок 15 регулирования турбины высокого давления, второй электромеханический преобразователь
16 и сервмотор 17 подачи топлива в камеру сгорания турбины высокого давления, ключ 18 управления и датчик
19скорости вращения ротора турбины низкого давления, подключенный к второму входу электрического блока 12 регулирования турбины низкого давления, выход первого электромеханического преобразователя 13 подключен к второму входу сервомотора 17 подачи топлива в камеру сгорания турбины высокого давления, выход датчика 3 скорости вращения ротора турбины высокого давления подключен к первому входу электрического блока 15 регулирования турбины высокого давления, первый выход ключа 18 управления подключен к второму входу блока 10 управления.
Кроме того, система содержит последовательно соединенные задатчик
20температуры газов за турбиной вы- , сокого давления и ограничитель 21 температуры газов за турбиной высокого давления, последовательно соединенные блок 22 выделения максимального сигнала и аналоговый регулирующий блок 23, блок 24 выделения минимального сигнала и задатчик 25 выходного тока аналогового регулирующего блока 23, подключенный к первому входу ре- лейно-импульсного регулятора 9 пуска и нагружения, второй вход которого подключен к выходу аналогового регулирующего блока 23 и третьему входу электрического блока 12 регулирования турбины низкого давления, третий вход - к выходу блока 22 выделения максимального сигнала и первому входу аналогового регулирующего блока 23, четвертый вход - к выходу блока 24 выделения минимального сигнала и второму входу аналогового регулирующего блока 23, а выход подключен
к первому входу блока 10 управления через первый нормально разомкнутый контакт 26 релейного автомата 8 пуска и нагружения, выход первого преобразователя 2 подключен к второму входу ограничителя 21 температуры газов за турбиной высокого давления и первому входу блока 22 выделения максимального сигнала, второй вход- которого подключен к выходу второго преобразователя 4, а третий вход через второй нормально разомкнутый контакт 27 релейног о автомата 8 пуска и нагружения - к выходу третьеО
5
0
го преобразователя 6, выход программного задатчика 7 подключен непосредственно к первому входу и через третий нормально разомкнутый контакт 28 релейного автомата 8 пуска и нагружения к второму входу блока 24 выделения минимального сигнала, второй выход которого через нормально замкнутый контакт 29 релейного автомата 8 пуска и нагружения подключен к первому входу программного задатчика 7, второй вход которого подключен к выходу релейного автомата 8 пуска и нагружения, а третий вход - к второму выходу ключа 18 управления, выход ограничителя 21 температуры газов за турбиной высокого давления подключен к второму входу электрического блока 15 регулирования турбины высокого давления.
Механизм 11 управления содержит электродвигатель 30 и датчик 31 управляющего воздействия, причем рабо- 5 той электродвигателя 30 управляет блок 10 управления, представляющий собой тиристорный блок управления, воздействие на блок 10 оказывает через контакт 26 релейного автомата 8 0 релейно-импульсный регулятор 9 пуска и нагружения, содержащий первый сумматор 32 входных сигналов и последовательно соединенный с ним первый функциональный преобразователь 33, который совместно с механизмом 11 управления формирует пропорционально-интегральный закон регулирования.
Электрический блок 12 регулирования ТНД содержит первый блок 34 0 измерения частоты, второй функциональный преобразователь 35, который формирует пропорциональный закон регулирования скорости вращения ротора ТНД с заданной неравномерно- 5 стью, первый суммирующий усилитель 36, причем блок 34 преобразует сигнал от датчика 19 скорости вращения ротора ТНД, токовый сигнал усилителя 36 преобразуется в электромеханическом преобразователе 13 в сигнал давления масла гидравлической части регулирования и управляет тем самым сервомотором 14 подачи топлива в камеру сгорания ТНД и сервомотором 17 подачи топлива в камеру сгорания ТБД.
Электрический блок 15 регулирования ТВД содержит второй блок 37 измерения частоты, преобразующий
5
0
5
сигнал отдатчика 3 скорости вращения ротора ТВД, третий функциональный преобразователь 38, который формирует пропорциональный закон регулирования скорости вращения ротора ТВД с заданной неравномерностью, второй суммирующий усилитель 39, причем токовый сигнал усилителя 39 преобразуется в электромеханическом преобра- зователе 16 в сигнал давления масла гидравлической части регулирования, который управляет только сервомотором 17.
Ограничитель 21 температуры га- зов за ТВД содержит второй сумматор 40 входных сигналов и четвертый функ- кциональный преобразователь 41, формирующий пропорциональный закон регулирования температуры газов за ТВД с заданной неравномерностью,, причем сумматор 40 суммирует сигнал от датчика 1 температуры газов за ТВД и сигнал от задатчика 20 температуры газов за ТВД, а выходной токовый сигнал ограничителя 21 суммируется и усиливается в усилителе 39 с сигналом преобразователя 38. Каждый из трех каналов обработки сигналов блока 22 выделения максимального сиг- нала содержит орган масштабирования, изменения постоянной составляющей, суммируемой с входным сигналом, и устройство сигнализации с логическим выходом, которое используется в схе ме технологической сигнапизации (не показаны).
Каждый канал блока 24 выделения минимального сигнала содержит орган масштабирования, орган изменения по- стоянкой составляющей, суммируемой с входным сигналом, орган демпфировани входного сигнала, а также устройство
0 ,
0
0
5
сигнализации с логическим выходом (не показаны), причем логический выход устройства сигнализации по каналу обработки сигнала второго входа подключен через контакт 29 релейного автомата 8 к схеме управления программным задатчиком 7.
Аналоговый регулирующий блок 23 содержит третий сумматор 42 входных сигналов и пятый функциональный преобразователь 43, с помощью которого устанавливается пропорциональ- но-интегрально-дифференциальный закон регулирования, а выходной ток блока 23, он же ток преобразователя 43, суммируется и усиливается в суммирующем усилителе 36 с сигналом преобразователя 35 и датчика 31 управляющего воздействия, а также выходной ток блока 23 суммируется в сумматоре 32 регулятора 9 с сигналом от задатчика 25 выходного тока аналогового регулирующего блока 23 и сигналами от блоков 22 и 24. I
Кроме того, система содержит приборы 44, 45 и 46 непрерывного контроля с устройствами сигнализации, причем прибор 44, контролирующий темпе- ратуру газов за ТВД, выдает релейный сигнал в схему релейного автомата 8 об окончании нагружения ГТУ.
Программный задатчик 7 представляет собой блок прецизионного интегрирования. Этот блок осуществляет реверсивное интегрирование аналогово входного токового сигнала X/(t), При этом обеспечивается управление режи мами работы интегратора блокаа Функциональная зависимость между входным X,(t) и выходным YM (t) сигналом имеет вид:



| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления газотурбинной установкой с двумя и более турбокомпрессорами | 1990 |
|
SU1765477A1 |
| Система регулирования турбины | 1977 |
|
SU661122A1 |
| СПОСОБ ЗАЩИТЫ ТЕПЛОФИКАЦИОННОЙ ТУРБОУСТАНОВКИ | 2009 |
|
RU2415276C1 |
| СПОСОБ КОНТРОЛЯ СУДОВОЙ ГАЗОТУРБИННОЙ УСТАНОВКИ | 2012 |
|
RU2493390C1 |
| Система регулирования блока котелтурбина-генератор | 1973 |
|
SU444890A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МОЩНОСТЬЮ ГИДРОАГРЕГАТА ГЭС | 2024 |
|
RU2830453C1 |
| УСТРОЙСТВО ДЛЯ АВТОЛ\АТИЧЕСКОГО РЕГУЛИРОВАНИЯ БЛОКА КОТЕЛ—ТУРБИНА | 1972 |
|
SU424985A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ И ЗАЩИТЫ ПАРОВОЙ ТУРБИНЫ | 2010 |
|
RU2450128C1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| Система автоматического управления скоростью вращения ротора турбины | 1980 |
|
SU866247A2 |

Изобретение относится к автоматическому управлению преимущественно двухвальными и одновальными газотурбинными установками (ГТУ) и позволяет повысить надежность и эффективность пуска и нагружения ГТУ, а также обеспечить работу ГТУ в автоматическом режиме с достижением предельной мощности с наилучшими экономическими показателями при существенных изменениях внешних условий. Регулирование турбины низкого давления (ТНД) и турбины высокого давления (ТВД) осуществляют сервомоторы 14 и 17 подачи топлива в камеры сгорания ТНД и ТВД по сигналам, поступающим через первый и второй электромеханические преобразователи 13 и 16 с выходов электрических блоков 12 и 15 регулирования ТНД и ТВД соответственно. Управляющее воздействие на электрический блок 12 регулирования ТНД формируют аналоговый регулирующий блок 23 и релейно-импульсный регулятор 9 пуска и нагружения через блок 10 управления и механизм 11 управления, содержащий электродвигатель 30 и датчик 31 управляющего воздействия. Текущее задание для указанных регуляторов формирует программный задатчик 7 с блоком 24 выделения минимального сигнала по сигналам с релейного автомата 8 пуска и нагружения и ключа 18 управления, а сигнал обратной связи - блок 22 выделения максимального сигнала по сигналам с датчиков 1, 3 и 5 температуры газов за ТВД, скорости вращения ТЕ ВЫСОКОЙ ЭКОНОМИЧНОСТЬЮ. 1 ИЛ.Ю.А.РАДИНН.А.ЦАЛИХИНА621.165ОДИТ НАРАСТАНИЕ СКОРОСТИ ПОТОКА, ПОСЛЕ ЧЕГО РТ оказывается в зоне N диффузорного течения. В зоне N с возникновением положительного градиента давления @ P/ @ X*98 0 происходит отрыв пограничного слоя от поверхности В 1 с образованием циркуляционного вихря K. Вихрь K занимает пространство от В 1 до Г 5, оттесняя линии тока РТ от радиального зазора. При этом создается дополнительное аэродинамическое сопротивление протечки РТ, что повышает экономичность ступени при сохранении надежности ее работы. 4 ил.в.б.кирилловн.а.цалих
при PJ Р,д 0 или РЈ Р„ 1 (режим хранения)
(t)
Y, + X,(t )dt, Ln 1
при FS 1 0 (режим интегрирования в прямом направлении)
м 1 р§ 0 (тэежим интегрирования в об- j X,(t)dt, при Р
и о ратном направлении)
50 Г
Р
где TW - постоянная времени интегрирования;
t - время интегрирования (время действия разрешающего сигнала)
Y0 - значение Ya, при t 0;
Рл - логический (релейный) сиг-нал разрешения интегрирования н прямом направлении;
м
55
- логический (релейный) сигна разрешения интегрирования в обратном направлении. Блок 22 выделения максимального сигнала к блок 24 выделения минималь ного сигнала представляют собой стан дартные блоки сравнения, которые пре назначены для выделения наибольшего или наименьшего сигнала из линейной
Р
м
5
- логический (релейный) сигнал разрешения интегрирования в обратном направлении. Блок 22 выделения максимального сигнала к блок 24 выделения минимального сигнала представляют собой стандартные блоки сравнения, которые предназначены для выделения наибольшего или наименьшего сигнала из линейной
комбинации входных токовых сигналов, для гальванической развязки цепей всех входных, сравниваемых между собой сигналов, а также входных цепей от выходных. Блок имеет три канала обработки информации, каждый из которых содержит устройство гальванического разделения и сумматор, имеющий несимметричную характеристику и дополнительный логический выход, подключенный к устройству сигнализаMCJKC
ции. В каждом канале возмо ние и подстройка сигнала с любой полярности от внутре с точника напряжения. В цепя сигналов X ((t) и Xa(t) вкл фирующие устройства с регу
постоянной времени.
i
10 Функциональные зависимо входными и выходными сигна вид:
макс- .(x,), ffcUz), fs(x3)(
ft, при Y f;(x;)J выполнения
n. // функции блока 22
4l JO, при Y ф f;(X{)
(XI)P fz(xa) fs(xj) Г 1, при Y f,- (xj)
Q e( 0, при Y jЈ (x,)
где ,2,3- номер входного
сигнала;
f,x,(p), + ) х2(р)Кхг(р) + хго(Р)... v V - . .р ;
(р)(р) + ХЗО(Р),
Xn (p) входные токовые сигналы;
FT () постоянные составляющие;
&Ј - коэффициенты масштабирования входного сигнала;
Тм- - постоянные времени демпфирования (с);
Р- оператор Лапласа;
Q, - логический (релейный)
Y(p) + ТДР)1 +-т . р + р-}ҐЈ Р) ПИД - закон регулирования блока 23 Y(p) YЈ(p), п - закон регулирования для блока 21
ф
где К р - коэффициент пропорциональности;
Тi - постоянная времени дифференцирования;
Ту, - постоянная времени интегрирования;
Р - оператор Лапласа;
Т - постоянная времени демпфи- рования.
Релейно-импульсный регулятор 9 предназначен для формирования ПИ-зако- на регулирования. Функциональная зависимость между входным сигналом Yf(р) и положением Y(p.) выходного органа
ции. В каждом канале возможно введение и подстройка сигнала смещения любой полярности от внутреннего ис- точника напряжения. В цепях входных сигналов X ((t) и Xa(t) включены демпфирующие устройства с регулировкой
постоянной времени.
i
Функциональные зависимости между входными и выходными сигналами имеют вид:
для выполнения функций блока 24
выход устройства сигнализации.
Блоки 21 и 23 - стандартные аналоговые регулирующие блоки, которые предназначены для формирования пропорционального (П), пропорционально-дифференциального (ПД), пропорциональноинтегрального (ПИ), пропорционально- интегрально-дифференциального (ПИД) законов регулирования в автоматических регуляторах с регулирующим воздействием в виде электрического сигнала постоянного тока с введением его ограничения. Функциональная зависимость между входным Y (р) и выходными Y(p) сигналами в режиме автоматического управления имеет вид:
45 исполнительного механизма (в данном случае положением механизма управления) имеет вид
0
Y(p)
где Кр
+ 100%
ет
Vc6
1
ТИР
)
1
1 + Тг
МР),
5
ЦГ. -г 0.-коэффициент пропорциональности
-скорость связи (скорость компенсации обратной связи сигнала рассогласования) ;
т
ттР -
Т - время, необходимое для изменения положения регулирующего устройства (механизма управления) на 1 00%;
постоянная времени интегрирования; постоянная времени демпфирования; оператор Лапласа. Система работает следующим образом.
Система начинает работать при включении релейного автомата 8 пуска и нагружения. Начинается автоматическое выполнение операций, требуемых на каждом этапе. После выполнения этапов зажигания камер сгорания ТВД и ТНД релейный автомат 8 подает команду в схему управления программного задат- чИка 7 и включает его в режим интегрирования в прямом направлении (сигнал PJ на фиг. 2). Сигнал Y2( (фиг. 2) начинает расти с постоянной времени интегрирования Т., . Данный сигнал преобразуется в блок 24, после чего является сигналом задания для регулятора 9 и блока 23. Наличие блока 24 с его Аункциональными возможностями позволяет автоматизировать процесс формирования сигнала задания в зависимости от режимов работы ГТУ (см. фиг. 2). Принимая на первый и второй входы сигнал Yai , блок 24 выполняет
12И
функцию преобразования выходного сигнала в зависимости от режима работы ГТУ. Графически указанная зависимость показана на фиг. 3.
Функциональная зависимость имеет, следующий вид.
При отключенном контакте 28 .,
U, хДр) + Х10(р)
т
WWH
(р)
(р)
x.Jp)
V20
где Х,0 (р) , Хго(р) ,
Х50(Р)
- уставки.
На графике фиг. 3 - это ломанная линия 47-48-49, т.е. значение ) не может превышать значения Хго (р). Значение Хго(р) устанавливается поэтому равным заданию холостого хода ГТУ для регулятора 9 и блока 23. Ввиду того, что пуск до холостого хода происходит по программе роста оборотов ТВ/1, то XCJ должно соответстгюватъ оборотам холостого хода ротора ТВД.
Значение X 0 выбирается равным оборотам ротора ТВД начала открытия сервомоторов 14 и 17 регулирующих клапанов подачи топлива в камеры -сгорания ТВД и ТНД. I
При включенном контакте 28
el, Хл (р) + X)0(p).-j ОгХгЫ ) VP
30
Т Чг1
5
На графике фиг. 3 это ломанная линия 47-50-51-52. Точка 50 является точкой окончания автоматического на 0 гружения Гту (от точки 48 до точки 50) и переход к ручному добору максимальной нагрузки (от точки 50 до точки 51). Изменение сигнала Ya, от О до точки 53 происходит за счет
5 подачи сигнала Pg- от релейного автомата 8 пуска и нагружения (см. фиг. 2), Изменение Y) от точки 53 до точки 54 происходит за счет воздействия от ключа 18 управления элект0 родвигателем 30 механизма 11 управления, т.е. от ручного воздействия машиниста ГТУ. Нагружение ГТУ происходит по температуре газов за ТВД, поэтому и значение Y и(р) в точке 50 должно соответствовать температуре, при которой автоматическое нагруже- ние прекращается.
Значение Хэо должно соответствовать максимальной температуре газов
р за ТВД и температуре газов за ТНД. Выбор об, и « должен определяться точками 50 и 51, причем точка 51 должна находиться как можно ближе к точке 52, с тем, чтобы использовать
5 максимальный диапазон изменения YZ;) .
Работа интегратора программного задатчика 7 зависит от работы блока 24. Так при достижении Y (фиг. 3) значения в точке 55, при отключенном
г, контакте 28, включается второй канал блока 24s и через блок его сигнализации выдает релейный сигнал Рм через нормально замкнутый контакт 29 (фиг. 2) в схему запуска интегратора в обратном направлении. Но так как интегратор имеет команду Рп от релейного автомата 8, изменение Yy прекращается, тем самым интегратору запрещено изменять свой сигнал. При
включении контакта 28 запрет Рм сни-i мается и интегратор снова от команда РЈ увеличивает значение Уг1 до значения в точке 53, после чего команда PJ, снимается.
В случае несения максимальной нагрузки ГТУ, когда задание для регулятора 9 и блока 23 определяется, например в точке 51 (фиг. 3), при отключений контакта 28 (сброс нагрузки), значение YWV)H (p) мгновенно
уменьшается и определяется в точке 56, ки всегда рост. тгв-гид имеет слож- т.е. становится равным Х20 - холостонии характер изменения при пуске, поэтому она подключается только после окончания автоматического нагру- жения. При нормировании сигналов, т.е. приведении их к унифицированном постоянному току 0-5 мА, за счет пре
му ходу ГТУ. Программный задатчик 7 получает команду Рм, что приводит к уменьшению значения Yz, до значения в точке 55, когда исчезает команда Р. Тем самым задание подготовлено к последующему набору нагрузки посл включения контакта 28.
Наличие демпфирующего звена во втором канале блока 24 с постоянной времени демпфирования Т™ позволяет изменять задание для регулятора 9 и блока 23 от ключа 18 управления электродвигателем 30 не ступенчато (с постоянной времени Ти интегратор а с максимальным приближением к той закономерности, с которой изменяетс температура газов при воздействии на механизм 11 управления. Посстоян ная времени изменения температуры газов при ступенчатом воздействии на механизм 11 управления равняется 15-20 с, откуда и выбирается значе
ние т 15:20 с. Это способствует практически безударно переходить с одного режима работы на другой без вмешательства со стороны регулятора 9 и блока 23.
Текущий параметр для регулятора 9 и блока 23 определяет блок 22.
На фиг. 4 приведен график изменения регулируемых параметров при пус1 маис
Ј.(х,) Х, + Х„
fzUi) . + Х20или У.макГ
fs(x3) + Х30
Согласно этой зависимости: до холостого хода ГТУ - УМЙКС есть Пт%д, при 5-10 МВт YWMKCпереключается на .A а Режиме максимальной на-
Ґмакс зависит от
L%( T&A
И
грузки
Тзйтнд, Это позволяет осуществить безударное подключение различных сигналов к регулятору 9 и блока 23 б настройки программного задатчика 7.
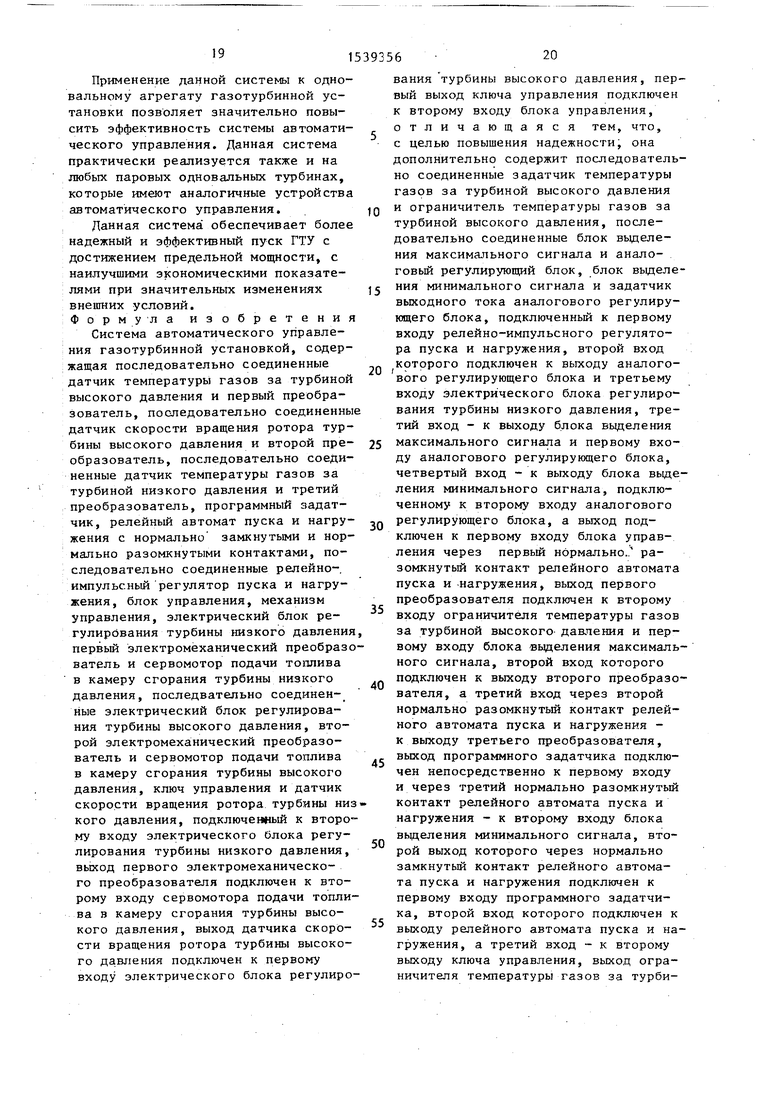
ке и нагружении ГТУ, где обозначено: Тзи тел температуры газов за ТВД; тза тНА температуры газов за ТНД; ПТ6А - оборотов ротора ТВД в зависимости от режима работы ГТУ. Из графика видно, что Т3о,т& и Пт&д изменяются монотонно до холостого хода (х.х.) ГТУ, причем при нагружении ГТУ от 0 до 100 МВт обороты ТВД стабилизируются и не превышают 4100 об/мин при 100 МВт. ТЯИТЙА имеет практически всегда рост. тгв-гид имеет слож-
5
5
нии характер изменения при пуске, поэтому она подключается только после окончания автоматического нагру- жения. При нормировании сигналов, т.е. приведении их к унифицированному постоянному току 0-5 мА, за счет преи 6 получаем
0 образователен 2, 4
1
X,
X, П
Т5е,т&Д--р20
1
тбд
3d Т НА
1200 1 120
(мА); (мА); (мА).
Для того, чтобы обеспечить сравнение сигналов на максимальной нагрузке ГТУ (100 МВт) по Tia ТЬА и Тротил необходимо, чтобы изменение нагрузки на определенную величину вызвало изменение сигналов X, и X, на одинаковую величину. Прираще ние нагрузки ГТУ на этих режимах соответствует одинаковому приращению Л-емператур за турбинами, поэтому коэффициенты усиления ci, и об этих сигналов в блоке 22 должны быть одинаковыми, т.е. равными 1. Но так как абсолютное значение ниже Т}а т&А на 0 С, необходимо ввести постоянную составляющую по каналу Х3. Функциональная зависимость, реализуемая блоком 22, принимает вид:
или У.макГ
Гг(г
X,
хг
f, (x) Хг
50
150 120
з
Релейно-импульсный регулятор 9, суммируя на сумматоре 32 сигналы от блока 24, т.е. сигнал задания, и блока 22, т.е. текущего параметра, и в зависимости от их рассогласования с помощью фукнционального преобразователя 33 совместно с тиристорным блоком 10 управления и механизмом 11 управления формирует пропорциональноинтегральный закон регулирования текущего параметра.
Аналоговый регулирующий блок 23 также суммирует на сумматоре 42 сиг- налы от блока 22 и блока 24, ив зависимости от их рассогласования с помощью функционального преобразователя 43 преобразует выходной унифицированный токовый сигнал по пропор- ционально-интегрально-дифференциаль- ному закону регулирования.
Наличие интерральной составляющей в передаточной фукнции блока 23 заставляет изменяться с постоянной вре- мени интегрирования Ти выходной токовый сигнал Y(p) всякий раз, если есть рассогласование YЈ(p). При Ye(p) 0, т.е. когда текущее задание равно текущему параметру, выходной ток бло- ка 23 не изменяется.
Для наиболее эффективного регулирования необходимо, чтобы при YЈ(p) 0 выходной ток Y(p) находился на уровне среднего значения его физичес- кой реализации, т.е. Y(p) изменяется от 0 до 5 мА, то это значение должно быть на уровне 2,5 мА. Поэтому введена связь между выходным током блока 23 и сумматором 32 регулятора 9. За- датчик 25, подключенный к входу сумматора 32, определяет заданное значение выходного тока.
Ввиду этого релейно-импульсный регулятор 9 пуска и нагружения вы- полняет одновременно две функции, т.е. поддерживает заданное значение текущего параметра и заданное значение -выходного тока блока 23. Работа происходит следующим образом (см. фиг. 5). Воздействие на механизм 11, управления не осуществляется, если выполнено условие для регулятора 9:
Wc(P + YMUH(P) + (Р + V(P} где (p) - сигнал текущего зада- ния от блока 22;
Vu и - от блока 24; Y(p) - выходной твк регулятора 23; (p) выходной ток задатчика 2 Если выполнено только условие, что
Ґмакс(Р) + ) ° т-е K0r«a те кущий параметр равен текущему заданию, a Y(p) Y(p) / 0, т.е. зка- чение выходного тока блока 23 не равно заданному значению, то происходит воздействие на механизм 11 управления от регулятора 9 с целью уста-и.,ч (р) сигнал текущего задания
Рпи И
новления заданного значения выходного тока блока 23, т.е. значение Y(p). При этом воздействии на механизм 11 управления появляется рассогласование между сигналами YMu|((C(p) и YMMH(p) так как задание не меняется, а подача топлива изменяется, что приводит к изменению температуры, а следовательно, и текущего параметра. Выходной ток блока 23 начинает изменяться с целью восстановления рассогласования.
Так, например, значение выходного тока блока 23 допустим было 3 мА. Заданное значение его должно быть 2,5 мА. Рассогласование при этом равно нулю. Регулятор 9 воздействует на механизм 11 управления в сторону прибавить, что ведет к увеличению расхода топлива и к увеличению температуры газов, поэтому выходной ток блока 23 начинает уменьшаться, чтобы снизить температуру. Если он достигнет значения 2,5, то процесс установления заданного значения тока прекращается, если нет, то все повторяется снова. Ввиду того, что при установлении заданного значения выходного тока блока 23 необходимо обязательно рассогласование между текущим параметром и текущим заданием, то необходимо выбирать зону нечувствительности регулятора 9 такой, чтобы он не реагировал на это рассогласование.
Значение выходного тока электрического блока 12 регулирования ТНД выражается зависимостью (Р) K;Yvnp(p) + (p) - KjYACiT (p) , где X6bl)t(p) - выходной ток блока 12;
К г.
К - коэффициенты пропорциональности для каждого канала блока 12;
Yvnp (р) - сигнал управляющего воздействия от механизма 1 управления;
Y(p) - выходной ток аналогового регулирующего блока 23;
YACST (р) сигнал датчика 19 скорости вращения ротора
тнд.
Согласно этой зависимости от отсутствии рассогласования между текущим параметром и текущим заданием любое изменение выходного тока блока 23 от его заданного значения должно
быть скомпенсировано сигналом от механизма 11 управления.
Выбор коэффициента Кг для сигнала Y(p) определяется условиями эффективного и безопасного регулирования при действии реальных возмущающих воздейт ствиях. Например, для ГТУ ГТ-100 это соответствует 5% общего открытия сервомоторов регулирующих клапанов по- дачи топлива в камеры сгорания. Например стопроцентное открытие сервомоторов соответствует значению выходного .тока блока 12, т.е. ХБЫ)( (р), равному 700 мА, откуда значение Кг рассчи- тывается из условия:
(p) 700 мА (5%).
Так как при начале пуска ГТУ задание, т.е. сигнал YMMH (p) соответствует оборотам ротора ТВД начала откры- тия сервомоторов 14 и 17 регулирующих клапанов, а текущий параметр отсутствует, то значение Y(p) блока 23 соответствует максимальному его значению,- т.е. 5% открытия сервомоторов. С тем, чтобы обеспечить полное закрытие регулирующих клапанов, необходимо сместить характеристику Х0Ь1)( (р) блока 12 от сигнала управляющего воздействия Yvf1p (р) в сторону закрытия сервомото- ров на 5%. (Усилитель 36 блока 12 позволяет это сделать).
По мере разворота ГТУ текущий параметр YWttK(.(p) догоняет текущее зада- ние Ywl(( (р) и, в случае его опереже- ния, сигнал Y(p) начинает уменьшаться и может достичь при большом рассогласовании нулевого значения; Тем самым обеспечивается автоматическое притормаживание ротора ТВД при пуске. В этом случае отпадает необходимость сигнала на убавить от регулятора 9 на механизм 11 управления при пуске.
После окончания нагружения ГТУ, когда рост задания от блока 24 пре- кращается, начинается стабилизация текущего параметра блока 22 за счет регулятора 9 и блока 23. Релейный автомат 8 подключает в этом случае воздействие на механизм 11 управле- няи регулятора 9 как в сторону прибавить, так и в сторону убавить. Одновременно происходит установление выходного тока блока 23 его заданного значения.
При появлении возмущения в первую очередь вступает в работу, т.е. начинает изменять выходной ток, аналоговый регулирующий блок 23. Регуля
Q
20 25 30
,с 0
д
5
тор 9 также вступает в работу, но по степени быстродействия значительно уступает, так как, являясь релейно- импульсным регулятором, он должен накопить достаточное рассогласование, чтобы воздействовать на механизм 11 управления. Блок 23 практически не имеет зоны нечувствительности, поэтому он воздействует практически сразу и непосредственно через блок 12 на сервомоторы 14 и 17.
При малых возмущениях релейно-им- пульсный регулятор 9 может вообще не воздействовать на механизм 11 управления, а .аналоговый регулирующий блок 23 отрабатывает в любом случае. Тем самым достигается более точное поддержание заданного значения температуры газов, которое не может быть достигнуто с помощью одного реле йно-импулъсного регулятора. При больших возмущениях вследствие ограниченного воздействия блока 23 на сервомоторы 14 и 17 релейно-импульс- ный регулятор 9 выполняет основную функцию по регулированию.
Работа ограничителя 21 температуры газов за ТВД осуществляется следующим образом. Совместная работа (фиг. 6) ограничителя 21 с блоком 15 определяется зависимостью
Хвых (Р) К,(Птвд- П,вл) + Кг- Крх
VP),
где Х6Ы)г (р) - выходной ток блока 12;
К,, Кг - коэффициенты пропорциональности блока 15 по соответствующим каналам;
П76Д - обороты ротора ТВД;
Пг.а„ - уставка-задание по
оборотам ротора ТВД;
YE(p)
Т - -}атьА
- Т а„анНС, сигнал рассогласования на входе ограничителя
21;
Кр - коэффициент пропорциональности блока 15. Из зависимости видно, что изменение выходного тока блока 15 осуществляется автоматически как при изменении оборотов ротора ТБД, так и при изменении температуры газов за ТВД. Тем самым распределение топлива ду камерами сгорания ГТУ осуществляется не как прежде, с помощью изменения уставки-задания по оборотам Пгао, а автоматически при изменении Т,.
Применение данной системы к одно- вальному агрегату газотурбинной установки позволяет значительно повысить эффективность системы автоматического управления. Данная система практически реализуется также и на любых паровых одновальных турбинах, которые имеют аналогичные устройства автоматического управления.
Данная система обеспечивает более надежный и эффективный пуск ГТУ с достижением предельной мощности, с наилучшими экономическими показателями при значительных изменениях внешних условий. Формула изобретения
Система автоматического управления газотурбинной установкой, содержащая последовательно соединенные датчик температуры газов за турбиной высокого давления и первый преобразователь, последовательно соединенны датчик скорости вращения ротора турбины высокого давления и второй преобразователь, последовательно соединенные датчик температуры газов за турбиной низкого давления и третий преобразователь, программный задат- чик, релейный автомат пуска и нагру- жения с нормально замкнутыми и нормально разомкнутыми контактами, последовательно соединенные релейно-. импульсный регулятор пуска и нагру- жения, блок управления, механизм управления, электрический блок регулирования турбины низкого давления первый электромеханический преобразователь и сервомотор подачи топлива в камеру сгорания турбины низкого давления, последвательно соединен ные электрический блок регулирования турбины высокого давления, второй электромеханический преобразователь и сервомотор подачи топлива в камеру сгорания турбины высокого давления, ключ управления и датчик скорости вращения ротора турбины низкого давления, подключенный к второму входу электрического блока регулирования турбины низкого давления, выход первого электромеханического преобразователя подключен к второму входу сервомотора подачи топлива в камеру сгорания турбины высокого давления, выход датчика скорости вращения ротора турбины высокого давления подключен к первому входу электрического блока регулиро
5
0 /
5
0
5
0
5
0
5
вания турбины высокого давления, первый выход ключа управления подключен к второму входу блока управления, отличающая ся тем, что, с целью повышения надежности, она дополнительно содержит последовательно соединенные задатчик температуры газов за турбиной высокого давления и ограничитель температуры газов за турбиной высокого давления, последовательно соединенные блок выделения максимального сигнала и аналоговый регулирующий блок, блок выделения минимального сигнала и задатчик выходного тока аналогового регулирующего блока, подключенный к первому входу релейно-импульсного регулятора пуска и нагружения, второй вход которого подключен к выходу аналогового регулирующего блока и третьему входу электрического блока регулирования турбины низкого давления, третий вход - к выходу блока выделения максимального сигнала и первому входу аналогового регулирующего блока, четвертый вход - к выходу блока выделения минимального сигнала, подключенному к второму входу аналогового регулирующего блока, а выход подключен к первому входу блока управления через первый нормально. разомкнутый контакт релейного автомата пуска и нагружения, выход первого преобразователя подключен к второму входу ограничителя температуры газов за турбиной высокого давления и первому входу блока выделения максимального сигнала, второй вход которого подключен к выходу второго преобразователя, а третий вход через второй нормально разомкнутый контакт релейного автомата пуска и нагружения - к выходу третьего преобразователя, выход программного задатчика подключен непосредственно к первому входу и через третий нормально разомкнутый контакт релейного автомата пуска и нагружения - к второму входу блока выделения минимального сигнала, второй выход которого через нормально замкнутый контакт релейного автомата пуска и нагружения подключен к первому входу программного эадатчи- ка, второй вход которого подключен к выходу релейного автомата пуска и нагружения, а третий вход - к второму выходу ключа управления, выход ограничителя температуры газов за турби21153935622
ной высокого давления подключен к регулирования турбины высокого дав- второму входу электрического блока
ления.
Г
XJffl
S
А АР.
схема запут
интегратора
в обратном
направлении
/ v
Т
регулир
ления.
8
52
Ь («
№ ТтЛ
Фаг. 3
5т А
| Ольховский Г.Г | |||
| Энергетические газотурбинные установки | |||
| М.: Энер- гоатомиздат, 1985, с.196-200, рис.7.7. |
