ел го
Изобретение относится к электротехнике, а именно к частотно-управляемым электроприводам, вьтолненным на основе асинхронного двигателя с короткозамкнутым ротором и преобразователя частоты, и может быть использовано в электроприводах механизмов с высокими требованиями к динамическим показателям, с частыми пусками, реверсами, с работой на упор. Целью изобретения является повышение точности управления за счет обеспечения автономности контуров регулирования частоты вращения, модуля потокосцепления ротора и фазных токов статора и достижения инвариантности их к параметрическим и внешним возмущениям в установившихся и переходных режимах работы, ограничения и стабилизации на заданном уровне ускорения электропривода.
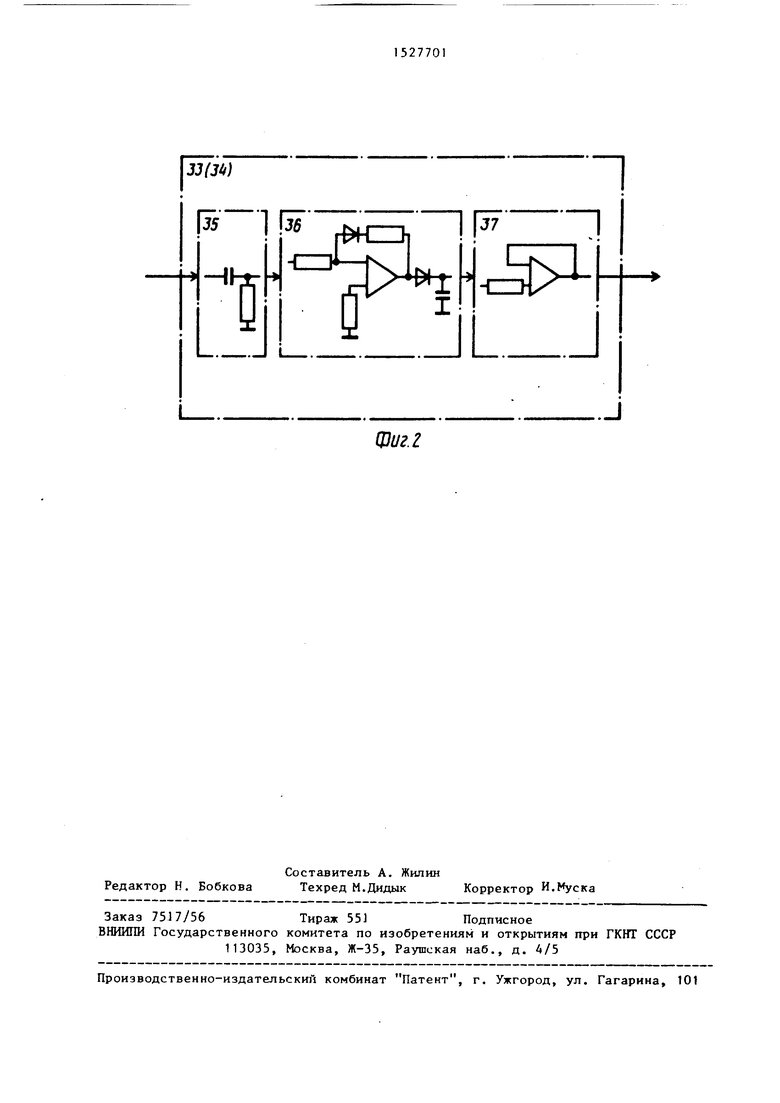
На фиг.1 представлена функциональная схема частотно-управляемого электропривода ; на фиг. 2 - схем демо- дулятора.
Частотно-управляемый электропривод содержит асинхронный короткозамкну- тый двигатель 1 (фиг.1) с встроенным датчиками потокосцеплений, блок 2 да чиков фазных токов, ключевой преобразователь 3 энергии, задатчик 4 интенсивности, сумматор 5, датчик 6 частоты вращения, ртулятор 7 частоты вращения, блок 8 деления, сумматор 9, блок 10 векторного анализатора, сумматор 11, регулятор 12 модуля потокосцепления ротора, преобразователь 13 координат, блок 14 регуляторов фазны токов, сумматор 15, релейный элемент 16, интегратор 17, сумматоры 18-20, блоки 21-23 дифференцирования, блок 24 умножения, блок 25 вь1деления абсолютных значений, релейные элементы 26-28, логический элемент НЕ 29, управляемый ключ 30, источник 31 опорного напряжения, интегратор 32, демодуляторы 33 и 34 .
Асинхронный короткозамкнутый двигатель 1 через блок датчиков фазных токов 2 подключен к выходу ключевого преобразователя 3 энергии, соединенного управляющими входами с выходами блока 14 регуляторов фазных токов. Задатчик 4 интенсивности, сумматоры и 19, регулятор 7 частоты вращения, демодулятор 33, блок 8 деления, сумматор 9 соединены между собой последовательно. Вход задатчика 4 интен
0
5
0
5
о 35
сивности через сумматор 15 соединен с последовательно включенными релейным элементом 16, сумматором 18, интегратором 17, причем последний выходом соединен с выходом задатчика 4 интенсивности и вторым входом сумматора 16. Второй вход сумматора 5 и вход блока 21 дифференцирования соединены с выходом датчика 6 частоты вращения. Выход сумматора 5 через блок 25 выделения абсолютных значений соединен с вторым входом блока 24 умножения. Первый вход последнего и его выход соединены соответственно с выходом блока 21 дифференцирования и с входом релейного элемента 26. Выход блока 8 деления через блок 22 дифференцирования соединен с входом релейного элемента 27 и с вторым входом сумматора 9. Выход блока 21 дифференцирования соединен с вторым входом сумматора 19. Выходы релейных элементов 16, 26 и 27 соединены соответственно с первым, вторым и третьим входами сумматора 18. Первые входы-выходы сумматоров 11 и 20, вход-выход регулятора 12 модуля потокосцепления ротора и вход-выход демодулятора 34 вкзщчетл последовательно . Второй вход сумматора 11, вход блока 23 дифференцирования и вход Делитель блока 8 деления подключены к выходу модуля потокосцепления блока 10 векторного анализатора. Первый и второй входы последнего связаны с выходом датчиков потокосцепления асинхронного двигате- ля 1 и с выходом блока 2 датчиков фазных токов. Выход сумматора 11 соединен с входом релейного элемента 28, выход которого подключен к входу управления управляемого ключа 30, а через элемент НЕ 29 - с входом 45 Сброс интегратора 32. Источник 31 опорного напряжения через основной вход-выход управляемого ключа 30 соединен с основным входом интегратора 32, выход которого подключен к третьему входу сумматора 20. Выход сумматора 9, выход демодулятора 34 и выход опорных гармонических функций блока 10 соединены с соответствующими входами преобразователя 13 координат. Выход блока 2 датчиков фазных токов ц выход преобразователя 13 координат подключены к входам блока 14 регуляторов фаэных токово выходом соединенного с входом управ40
50
55
ления ключевым преобразователем 3 энергии.
Демодуляторы 33 и ЗА (фиг.2) содержат каждый последовательно включенные входами и выходами симметрирующий элемент 35 , пиковый детектор 36, повторитель 37. Вход симметрирующего элемента 35 и выход повторителя 37 соединены соответственно с входом и выходом демодулятора 33(34)
Асинхронный двигатель представляет собой нелинейный взаимосвязанный объект управления, характеризующийся параметрической нестационарностью, наличием внутренних перекрестных связей между каналами регулирования .
Для обеспечения автономности контуров регулирования модуля вектора потокосцепления ротора и скорости асинхронного двигателя, инвариантности их к параметрическим и внешним возмущениям необходимо обеспечить непрерывные скользящие режимы в данных контурах. Так как внутренние контуры регулирования фазных токов статора подчинены внешним контурам регулирования модуля потокосцепления и частоты вращения ротора, возникает необходимость разделение движений в системе регулирования путем вьщелени медленной (низкочастотной) составляющей выходных сигналов релейных регуляторов внещлих контуров. Разделение движений в системе позволяет осуществить в контурах регулирования фазных токов статора свои скользящие режим1,1, которые определяются параметрами данных контуров и приложенными к ним возмущающшчи воздействиями.
Организация многомерного непрерывного скользящего режима в системе регулирования позволяет обеспечить автономность контуров регулирования, их инвариантность к параметрическим и внешним возмущениям и повысить точность системы в целом.
Частотно-управляемый электропривод работает следующим образом.
Сигнал задания скорости W поступает на вход задатчика 4 интейсивно- сти, который обеспечивает задание
dW2
темпа
dt
Выходной сигнал задатчика интенсивности u) совместно с сигналом датчика обратной связи по скорости U) поступают на входы первого сумматора 5. Сигнал на его выходе
)-w
пропорционален ошибке регулирования и поступает на вход шестого сумматора 19, формирующего плоскость переключения релейного регулятора 7 по выражению
dw
W - С
dt
(1)
где С, - постоянный коэффиг.иент;
dco dt
- сигнал на выходе блока 21, пропорциональный производной скорости АД.
Обеспечение условия
дШг du)
осуdt dt
ществляется подачей корректирующего сигнала U, с выхода релейного элемента 26 с зоной нечувствительности на второй вход сумматора 18. Сигнал и ц на выходе релейного элемента 26 определяется по соотношению

| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ДВИГАТЕЛЕМ С СИСТЕМОЙ ПРЕДИКТИВНОГО УПРАВЛЕНИЯ МОМЕНТОМ | 2024 |
|
RU2829212C1 |
| Электропривод переменного тока | 1987 |
|
SU1429272A1 |
| Электропривод | 1987 |
|
SU1515324A1 |
| Электропривод переменного тока | 1987 |
|
SU1432711A1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
Изобретение относится к электротехнике, а именно - к частотно-управляемым электроприводам, выполненным на основе асинхронного двигателя с короткозамкнутым ротором и преобразователя частоты, и может быть использовано в электроприводах механизмов с высокими требованиями к динамическим показателям, с частыми пусками, реверсами, с работой "на упор". Целью изобретения является повышение точности управления. В электропривод введены сумматоры 18 - 20, блоки 21 - 23 дифференцирования, блок 24 умножения, блок 25 выделения абсолютного значения, релейные элементы 26 - 28, элемент НЕ 29, ключ 30, источник 31 опорного напряжения, интегратор 32, демодуляторы 33, 34. При этом обеспечивается автономность контуров регулирования частоты вращения, модуля потокосцепления ротора и фазных токов статора и достижение инвариантности их к параметрическим и внешним возмущениям в установившихся и переходных режимах работы.2 ил.
и:
;,если( 0) Л (и,, d,) ,
О,если(U24 0) Л (Uj : d,),
и; ,если( 0)Л (и
О,если(и,,4 0) Л (14 d,).
i: t и и: значения ам1шитуды напряжения релейного элемента 26, определяемые
и
сигналом управления выходное напряжение блока 24 умножения, определяемое как произведение модуля сигнала
V,
(2)
55
11 U) I и производной
dw
скорости
U.4 (Eu)|.
dt
(3)
d - зона нечувствительности релейного элемента 26.
Ееализация выражений (2) и (3) осуществляется блоками 21-26.
Выделение низкочастотной составляющей выходного сигнала регулятора 7, работающего в непрерьганом скользящем режиме, осуществляется демодулятором 33, сигнал на выходе которого при / v / const является заданием момента М . При изменениях I с/ I блок 8 деления осуществляет масштабирование сигнала М в соответствии с вьфажением:
М
, М
M
,J
IW
/
(4)
где сигнал на выходе блока 8
деленияj Iу I - сигнал с первого выхода
блока вычислений. В блоке вычислений по значениям потокосцеплений V / ди потока воздушного зазора, измеренным датчками потокосцеплёния, выполненными например, на зле ентах Холла, и по
5Л
S6
SC
блока 2
фазных токов вычисляются щие ы . потокосцеплёния
ro.ft
.
25
- L
so/
-L
cfr 5/3 30
и,если (и 0)Л (и,; dj) ,
О ,если ( 0)Л ( d-г) ;
Ug,если (Uj 0)Л (Ui dj);
О ,если ( ; 0)А (Uji di) ,
де
;
и - значение амплитуды
напряжения на выходе т третьего релейного элемента 27, определя,емое сигналом управления
выходное напряжение блои ,4
yг
ка 22, равное
dM dt
«-
- зона нечувствительности,с0 определяемая допустимым
значением
dt г
На выходе сумматора 9 напряжение сое
dM
Ja определяется по соотношению
,(и„ м
М
+ с
idt
где Со постоянный коэффициент.
К - коэффициент связи ротора;
, -I индуктивность рассеяния ротора;
salu значения составляющих тока статора, определяемые как
Jof/ bA S/9
1 5 В - 1 SC
/3
По значениям v определяются модуль потокосцеплёния ротора и опорные гармонические функции:
Ы -
V
r/i
ein V
r
IV,
сое V ir
(Vrl
которые подаются соответственно на первый и второй выходы блока 10. Для обеспечения непрерьгеного скользящего режима в контурах регулирования фазных токов введено ограничение на скорость изменения активной составляющей тока статора. С этой целью на выходе релейного элемента 27 вырабатывается сигнал коррекции Гц 2определяемый по соотношению
(5)
5
0
Такое формирование задания активной составляющей тока статора позволяет повысить точность отработки задающих воздействий в контурах регуляторов фазных токов.
Плоскость переключения регулятора 12 модуля потокосцеплёния ротора определяется выражением dIVrl
- 1
К.Э4
(6)
5
где
v
I ::
Ся у - сигнал, пропорциональный ошибке регулирования, определяемый выходным напряжением сумматора 11; постоянный коэффициенту
сигнал, пропорциональный производной модуля потокосцепления ротора, на выходе блока 23.
и
k37
где и
31
напряжение опорного источника 31 ,
Т - постоянная времени интегратора 32,- d - - зона нечувствительности
релейного элемента 28. Выделение низкочастотной составляющей выходного сигнала регулятора 12 модуля потокосцеплеиия ротора осуществляется демодулятором 34. В демодуляторах 33 и 34 входной сигнал без искажения формы симметрируется относительно нуля симметрирующим элементом 35, выполненным в виде RC-це- почки. Площади положительного и отрицательного импульсов напряжения выравниваются. При этом амплитуда, например, отрицательного импульса.пропорциональная скважности входного сигнала демодулятора, выделяется пиковым детектором 36 и через повторитель 37 поступает на выход демодулятора . Выходное напряжение демодуляторов 33 и 34 линейно связано со скважностью входного напряжения.
В преобразователе 13 координат вычисляются сигналы задания ортогональных составляющих вектора тока
,. f .
статора i 5 и фазных токов i , igg
i sc . Вычисления осуществляются по соотношениям
.
ISo
5Л
«- SA
l,cos ly - и sin IV , U34sin V + и cos V ; is, -0.5i, 0.866iJ,) i5e -0,5i5V 0,866isp.
Отработка заданий фазных токов статора осуществляется в замкнутом контуре регулирования, образованном элементами 14, 3 и 2.
Таким образом, введение в частотно-управляемый электропривод сумматоров, блоков дифференцирования, блока умножения, блока вьщеления абсоСигнал коррекщ н 1J
к 52
ВХОДЯЩИЙ
в выражение (6) плоскости переключения S, , обеспечивает непрерывный скользящий режим в данном контуре и формируется элементами 28-32 по выражен tno
U3,dt, при d ;
о ,
при d ,
(7)
t5
20
5
0
5
0
5
0
5
лютного значения, трех релейных элементов с зоной нечувствительности, логического элемента НЕ, управляемого ключа, источника опорного напряжения, интегратора с входом сброса, двух демодуляторов, обеспечивает автономность контуров регулирования скорости, модуля потокосцепления ротора и фазных токов статора и их инвариантность к параметрическим и внешним возмущениям в переходных и установившихся режимах работы, ограничение и стабилизацию на заданном уровне ускорения электропривода, что позволяет повысить точность управления в сравнении с известным устройством.
Формула изобретения
Частотно-управляемый электропривод, содержащий асинхронный коротко- замкнутый двигатель со встроенными датчиками потокосцепления, подключенный через блок датчиков фазных токов к соответствующим выходам ключевого преобразователя энергии, за- датчик интенсивности, первый сумматор, подключенный одним входом к выходу указанного задатчика, а другим входом - к выходу датчика частоты вращения, установленного на валу асинхронного короткозамкнутого двигателя, регулятор частоты вращения, блок деления и подключенный к его выходу второй сумматор, блок векторного анализатора с выходами опорных гармонических функций и модуля потокосцепления ротора, подключенный входами к выходам датчиков потокосцепления и блока датчиков фазных токов, третий сумматор, один из входов которого предназначен для задания модуля потокосцепления ротора,а другой вход объединен с входом делителя блока деления и под; тючен к выходу
модуля потокосцеплення ротора блока векторного анализатор:, регуляторов фазных токов, соответствующие входы которого подключены к выходам блока датчиков фазных токов и к выходам преобразователя координат, а выходы соединены с соответствующими входами управления ключевого преобразователя энергии, nepniiift и второй входы преобразователя координат подключены соотБетствеиио к выходу втрого сумматора и к ijL;.-.:o;.i,y опорных гармонических функци; ; блока векторного анализатора, при JTOM задатчик интенсивности Bi,mojiiiPH с суммг,тором релейным э..емеи ro -i и-ч ri-paTo;;:i i
выход которого . 1И 1ХОД т.ч и Тчика интенсивности и подключен к одному из входов укгкзанного сумматора другой вход KOTopoi i.i Г)брпзует ьход задания задатчика интенсивности, а выход сум1-1атора и зял., интенсиности подключеь к ; : .,,чу релеГ)нс)1 о элемента, о т л и м .i w щ и и с я тем, что, с целью 1ил1ЬП е}г И); точност управления за (.;чс 1 оГи-т.- чения РВ- тономнос 1 и KOHi yp;. :: Ч-1 V iipoBai H
частоты i.rp.imt HH , ПОТОКС;С ;,1 :
ления pt TOp, и ;ia i; -L TOI.OP статора и дост11 :ен 1;. J inai-n iirL ii( их к параметрич ,-сг:им в. ...пннм возмущениям li угтаг. ; .;i; iniiAc:H и переходных режимах pa ..ib 1)1,)яничения и гта- билизап.ии и, :; ния Электре 1||ги..: ,
ТЪ1Й и ПЯТ, ГУ Г:
рой И третий б К), ния, блок ун1111 ;ел ния абсолютных ; второй н тр( .; р зоной нечунсчinr. ч
Э.ЧеМеНТ НЕ , VJ;p;-: ;
опорного .. .ni,(/i.tjni л, n .iTei paiор, снг:бжеииы) 1 вх1:.1дом сС рога, первый и второй демодулято1 |11, а задатчик интенсивности ло1юлннтел ным сумматором, noAKjjcj-ieui .biM одним входом к 1)1)|/. ;iL:Jiei ; ioro элемента , а выходом - к вх( ;у интегратора, пр этом д;;угие дьа : ;од,1 до.чолнит елъ1:о
,1
, ровне ускоре депы чствер- i /pw,, nepniirii, ВТО-- 1 .iiai:rtiiepfc ь , Олок ныд1, ле- i4i;,i .ij i, первый , :Р I iiiMi элементы с ги, Л.гически
..н Г-- .Й КЛЮЧ ,ИС ГОЧН
5
0
5
0
5
0
5
0
сумматора в задатчике интенсивности соединены соответственно с выходами первого и второго релейных элементов, входы первого, второго и третьего блоков дифференцирования подключены соответственно к выходу датчика частоты вращения, к выходу блока деления и к выходу модуля потокосцепления ротора блока векторного анализатора, выход первого блока дифференцирования соединен с первым входом блока умножения и с вторым входом четвертого сумматора, выход второго блока дифференцирования соединен с вторым входом второго сумматора с ВХОДОМ второго релейного элемен- га, выход третьего блока дифференцирования соединен с вторым входом пятого сумматора, первый вход кото- рогс соединен с выходом третьего сумматора, выход четвертого сумматора подключен к входу регулятора частоты вращения, выход пятого сумматора соединен с входом регулятора модуля потокосцепления ротора, выход первого сумматора соединен непосредственно с первым входом четвертого сумматора, а через блок выделения абсолютных значений - с вторым входом блока умножения, выходом подключенного к входу первого релейного элемента, выход третьего сумматора соединен с входом третьего релейного элемента,выход которого соединен непосредственно с входом управления управляемого ключа, а через логический элемент НЕ - с входом сброса интегратора, источник опорного напряжения через коммутируемые выводы управляемого ключа соединен с основным входом интегратора, выход которого подключен к третьему входу пятого сумматора, выход регулятора частоты вращения через первый демодулятор соединен с входом делителя блока деления, а выход регулятора модуля потокосцепления ротора через второй демодулятор соединен с третьим входом преобразователя коорди 1ат.
Щи г. г
| Устройство для управления асинхронным электродвигателем | 1977 |
|
SU868960A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Слежановский О.В | |||
| и др | |||
| Системы подчиненлого pei-улировапия электроприводов ггеременного тока с вентильными преобразователями.-М.: Энерго- атомиэдат, 1983, с | |||
| Плуг с фрезерным барабаном для рыхления пласта | 1922 |
|
SU125A1 |
