Изобретение относится к гидроэнергетике и связано с устройствами и системами управления активной мощностью гидроагрегатов ГЭС путем регулирования потока воды через гидротурбину, которая работает в широком диапазоне регулируемых нагрузок гидроагрегата, участвующего в общем первичном регулировании частоты (ОПРЧ) или нормированном первичном регулировании частоты (НПРЧ) и выполняющего задачу поддержания общесистемных параметров в электроэнергетической системе в условиях рынка электроэнергии и мощности.
Благодаря более высокой маневренности гидроагрегатов (ГА) ГЭС но сравнению с энергоблоками ТЭС и АЭС, эксплуатация ГА сопровождается так называемыми «режимами глубокого регулирования». В этих условиях имеет место изменение параметров потока воды и возникновение кавитационных явлений, что ведет к существенному снижению эффективности (к снижению КПД) ГА. При этом возникают значительные динамические нагрузки на гидротурбину (ГТ) и элементы сооружения ГЭС. Известны случаи, когда «режимы глубокого регулирования» приводили к тяжелейшим авариям, не обеспечивая при этом требуемое качество поддержания общесистемных параметров в электроэнергетической системе.
Основная проблема управления активной мощностью ГА ГЭС связана с обеспечением гарантий регулирования в широком диапазоне изменения нагрузок, например, при работе в режиме поддержания общесистемных параметров - участие в ОПРЧ и НПРЧ в соответствии с требованиями рынка на сутки вперед и балансирующего рынка. При этом с целью выполнения общесистемных критериев (fc=const при минимизации первичных резервов для поддержания баланса мощности) необходимо обеспечить работу ГА в эффективном диапазоне нагрузок (область максимальных КПД) и требуемое качество переходных процессов. Согласно общим техническим требованиям к САУ активной мощностью ГА ГЭС (ОТТ СО 34.35.524-2004, СТО 59012820.27.140.001-2014 и ГОСТ Р 56969-2016), переходной процесс регулирования мощности ГА должен иметь монотонный характер с постоянной времени от 10 до 40 с. Иными словами, переходные процессы регулирования на верхнем уровне иерархической САУ не должны иметь колебательной составляющей, т.е. отвечать требованием критерия «плавности». При этом на уровне поведения потока в гидротурбине требуется обеспечить условия, при которых отсутствует проявление кавитационных явлений, ведущих к повреждению рабочего колеса гидротурбины и существенному падению эффективности ГА.
Известны способы, системы и устройства регулирования активной мощности гидротурбин путем воздействия на направляющий аппарат гидротурбины (НА ГТ) и соответствующего изменения расхода воды через ГТ (входное управляющее воздействие), при этом выходными контролируемыми параметрами служит частота вращения ротора ГТ и мощность ГА («Система регулирования гидроагрегатов с групповым регулятором скорости» // P.M. Эпштейн, Б.Е. Митрофанов, М.Я. Руденский / М.: Энергия, 1968. - 192 с. ГЛАВА 3. Исследование структурных схем регуляторов скорости гидротурбин. - С. 42-85; Пивоваров В.А. Проектирование и расчет систем регулирования гидротурбин //Л.: Машиностроение, 1973. -288 с).
Известен «Способ регулирования частоты вращения реактивной гидравлической турбины и ПИД-регулятор частоты вращения сильного действия» (Патент RU №2781087, МПК F01D 17/20, F03B 15/06, 2022 г. ), согласно которому в состав системы регулирования частоты вращения ротора реактивной турбины, включающей вращающийся ротор агрегата, водоводы, подводящие воду к турбоблоку (турбина плюс отсасывающая труба), электрогидравлические приводы регулирующих органов, входит измеритель частоты вращения ротора турбины, задатчик соответствующей уставки и формируемая сумма сигналов по отклонению частоты, динамического напора и положения регулирующего органа, используемая в качестве входного сигнала для ПИД-регулятора, минимизирующего ошибку регулирования.
Недостатками указанного технического решения являются сложность в настройке и невозможность обеспечения требуемого качества переходных процессов при участии ГА в поддержании общесистемных параметров. В частности, используемая информация (сумма сигналов по отклонению частоты, динамического напора и положения регулирующего органа) характеризует динамические свойства объекта управления по разным динамическим каналам: по каналу управляющего воздействия - положение НА ГТ и каналам внешних контролируемых возмущений - динамический напор и баланс потребляемой и генерируемой мощности, т.е. суммируемые сигналы имеют разное назначение в решении задачи структурного синтеза САУ мощностью и разные критерии настройки.
Широко известны регуляторы частоты вращения гидротурбины путем изменения расхода воды через гидротурбину, которые применяют при регулировании активной мощности гидроагрегатов (например, «Регулятор частоты вращения гидротурбины», патент RU 68604, МПК F03B 15/00, F03B 15/04, 2007 г.; «Регулятор частоты вращения гидротурбины с холостым выпуском», патент RU 129162, МПК F03B 15/04, 2013 г.; «Регулятор частоты вращения гидротурбины» патент RU 185322 МПК F03B 15/04, 2018 г. ). Указанные устройства содержат датчик частоты вращения, механизм управления углом поворота (положения) направляющего аппарата ГТ, соединенный с серводвигателем, датчик обратной связи по положению штока серводвигателя направляющего аппарата (НА ГТ), а также, например, блоки коррекции и адаптации, обеспечивающие подстройку параметров ПИД-регулятора (коэффициента усиления регулятора) при работе в широком диапазоне нагрузок.
Таким образом, недостатки известных устройств регулирования расхода рабочего тела (воды через турбину) и мощности ГА связаны с низкой точностью регулирования и характером переходных процессов. Колебательные переходные процессы в замкнутой системе регулирования ведут к нарушению расчетного гидродинамического процесса потока, а именно к изменению окружной скорости лопаток рабочего колеса, соответственно, имеет место изменение/падение давления турбулентного потока на кромках лопаток рабочего колеса до некоторого критического значения ркрит, что способствует возникновению кавитационных явлений, которые влекут за собой повреждение рабочего колеса, снижение эффективности процесса, срока службы ГТ и др.
Известно «Устройство контроля скорости для регулятора скорости гидротурбины» (патент RU 2292483, МПК F03B 15/12, F15B 9/08, 2007 г. ) принятое в качестве прототипа. Устройство контроля скорости для регулятора скорости ГТ, содержит ПИД-регулятор, задатчик частоты вращения гидротурбины, соединенный через сумматор главной обратной связи с модулем усиления пропорциональной составляющей ПИД-регулятора, модуль ограничения текущего задания ПИД-регулятора, первый вход которого соединен с выходом модуля вычисления величины ограничения открытия направляющего аппарата, а выход с первым входом модуля сумматора местной обратной связи, второй вход которого соединен с датчиком открытия направляющего аппарата гидротурбины, а выход с электрогидравлическим преобразователем, выход последнего с гидротурбиной, датчик частоты тока гидрогенератора, датчик напора, ручной задатчик напора, соединенные с модулем коммутации сигнала по напору, выход которого соединен с модулем ограничения скорости изменения сигнала по напору, модуль расчета величины открытия направляющего аппарата при холостом ходе гидротурбины, первый и второй датчики частоты вращения вала гидрогенератора, модуль пуска и остановки гидротурбины, причем выходы датчика тока гидрогенератора и первого, и второго датчиков частоты вращения вала гидрогенератора соединены соответственно с первым, вторым и третьим входами модуля выбора каналов измерения частоты вращения гидрогенератора, выход которого соединен с первым входом модуля пуска и остановки гидротурбины, модулем дифференцирующего звена ПИД-регулятора и сумматором главной обратной связи, выход которого соединен с первым входом первого модуля коммутации сигнала, на второй вход которого подается сигнал с выхода модуля пуска и остановки гидротурбины, а выход соединен с модулем интегрирующего звена ПИД-регулятора, причем выходы модулей усиления пропорциональной составляющей, интегрирующего и дифференцирующего звеньев соединены соответственно с первым, вторым и третьим входами сумматора ПИД-регулятора, выход которого соединен с первым входом второго модуля коммутации сигнала, на второй вход которого подается сигнал с модуля пуска и остановки гидротурбины, а выход соединен со вторым входом модуля ограничения текущего значения ПИД-регулятора, выход которого соединен со вторым входом модуля пуска и остановки гидротурбины, а выход модуля ограничения скорости изменения сигнала по напору соединен с входом модуля вычисления величины ограничения открытия направляющего аппарата и модулем расчета величины открытия направляющего аппарата при холостом ходе гидротурбины, выход которого соединен с третьим входом модуля пуска и остановки гидротурбины, причем выход последнего соединен с третьим входом сумматора местной обратной связи.
Недостатком прототипа является низкое качество регулирования в режиме ОПРЧ/НПРЧ в условиях электроэнергетического рынка. В частности, имеет место перерегулирование по давлению, мощности и оборотам гидротурбины - немонотонный/колебательный характер переходных процессов, а также косвенная оценка влияния напора на положение НА ГТ и др.
Иными словами, у прототипа на базовом электрогидравлическом уровне просматривается реализация комбинированной автоматической системы регулирования (АСР) с П-регулятором, при которой устройство компенсации изменений внешнего контролируемого возмущения косвенно представлено в виде модуля вычисления величины ограничения открытия направляющего аппарата.
Недостатки регулирования мощности объясняются в том числе следующими объективными факторами.
Колебательный характер переходных процессов объясняется физическими особенностями гидроагрегатов.
Ротор гидротурбины представляет собой вращающуюся систему, которая обладает определенной кинетической энергией вращения:
где  - момент инерции системы, Н мс2;
- момент инерции системы, Н мс2;  - угловая скорость вращения системы,
- угловая скорость вращения системы, 
При этом колебательный характер процессов объясняется свойствами математической модели гидроагрегата, характеристическое уравнение которой содержит комплексные корни, что и объясняет колебательный характер переходных процессов. При этом известно, что степень затухания переходных процессов в такой системе не может быть выше степени затухания собственных колебаний объекта управления (Давыдов Н.И., Зорченко Н.В. Модельные исследования одноконтурной автоматической системы регулирования с колебательным объектом // Теплоэнергетика, 2004, №8. - С. 56-60). Поэтому известная структура системы требует соответствующего изменения, как в части эффективной информации (управляемых параметров) и структурного синтеза системы, связанного в том числе с влиянием параметров напора на энергию кавитации, так и в аспекте повышения качества регулирования.
Кинетическая энергия ротора связана с вращающимися в системе ГА массы ротора (металла), воды в объеме рабочего колеса, как термодинамического рабочего тела, и - квадратом окружной скорости рабочего колеса.
Согласно методу обобщенных термодинамических потенциалов и термодинамических координат неравновесной термодинамики, термодинамический потенциал установки определяется половиной момента инерции, который может быть определен через маховый момент ГА, (определяется типоразмером ГА, на интервале регулирования можно принять постоянной величиной), а термодинамическая координата (управляемый параметр) определяется квадратом угловой скорости вращения ротора ГА (сигнал, характеризующий изменение кинетической энергии вращения ротора ГА).
Модернизировать действующий ГА в соответствие требованиям эффективной автоматизации путем физического изменения электрогидравлической части ГА на практике не представляется возможным (неизменяемая часть устройства). Поэтому требуемую управляемость ГА в заявляемом решении предложено синтезировать путем построения иерархической структуры системы автоматического управления мощностью (САУМ), в которой на базовом уровне формируется некий эквивалентный объекта управления, желаемые динамические свойства которого достигаются путем соответствующего регулирования потока воды, как подсистемы нижнего уровня управления с желаемыми динамическими свойствами.
Задачей, на решение которой направлено изобретение, является эффективное регулирование потока воды и требуемое качество управления мощностью ГА в регулирующем режиме путем структурного синтеза соответствующей иерархической САУМ ГА.
Технический результат заключается в повышении точности управления и эффективности участия ГА в режиме поддержания общесистемных параметров путем улучшения динамических свойств устройства и получение характеристик процессов регулирования требуемого качества.
Технический результат достигается тем, что система автоматического управления мощностью гидроагрегата ГЭС, содержащая гидротурбину с направляющим аппаратом, который посредством электрогидравлического усилителя и регулятора положения направляющего аппарата соединен с сервомотором, датчики частоты вращения ротора гидротурбины и датчик положения направляющего аппарата, который соединен с регулятором положения по принципу отрицательной обратной связи, и блок формирования значения положения направляющего аппарата; последовательно соединенные датчик уровня воды в верхнем бьефе, фильтр высокочастотных колебаний, нелинейный элемент подключенные к первому входу блока ручного управления, ко второму входу которого подключен ручной задатчик напора; датчик частоты в электроэнергетической сети и задатчик значения частоты в электроэнергетической сети подключенные к формирователю сигнала по отклонению частоты соединенному через нелинейный элемент с частотным преобразователем; датчик мощности гидрогенератора подключенный к первому отрицательному входу регулятора мощности, ко второму положительному входу которого подключен формирователь задания соединенный с задатчиком плановой мощности и с задатчиком неплановой мощности, выход регулятора мощности подключен через блок ручного переключения к формирователю ограничений соединенному с подсистемой ограничений диапазона изменения нагрузки и с подсистемой ограничений скорости изменения нагрузки, дополнительно содержит регулятор кинетической энергии вращения рабочего колеса гидротурбины, задатчик кинетической энергии вращения рабочего колеса, блок умножения, два блока дифференцирования, фильтры высокочастотных помех, устройство компенсации внешнего контролируемого возмущения по уровню воды и устройство компенсации внешнего контролируемого возмущения по изменению частоты в сети, при этом фильтры высокочастотных помех подключенные к соответствующим датчикам частоты вращения соединены с соответствующими входами блока умножения, выход которого подключен к первому входу регулятора кинетической энергии вращения рабочего колеса гидротурбины и к первому блоку дифференцирования, выходом подключенного ко второму отрицательному входу регулятора кинетической энергии вращения рабочего колеса гидротурбины, к третьему входу которого подключен формирователь ограничений, с четвертым входом соединен задатчик кинетической энергии вращения рабочего колеса, к пятому входу подключено устройство компенсации внешнего контролируемого возмущения по уровню воды, соединенное с выходом блока ручного управления, а выход регулятора кинетической энергии вращения рабочего колеса гидротурбины соединен с сервомотором, при том датчик мощности гидрогенератора через второй блок дифференцирования подключен к третьему входу регулятора мощности, а частотный преобразователь через устройство компенсации внешнего контролируемого возмущения но изменению частоты в сети соединен с четвертым входом регулятора мощности. В качестве датчиков частоты вращения ротора гидротурбины используют датчики частоты напряжения гидрогенератора гидроагрегата, при этом используют фильтры высокочастотных помех выполненные с возможностью фильтрации высокочастотной составляющей сигналов от датчиков частоты напряжения гидрогенератора гидроагрегата.
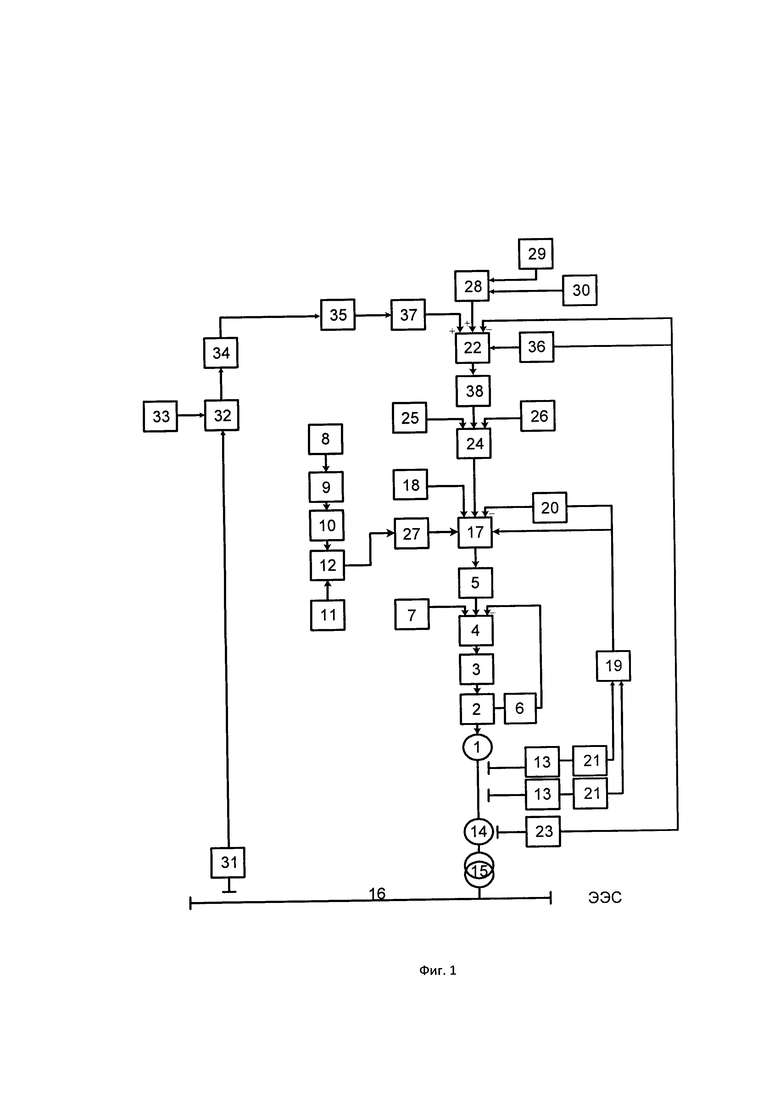
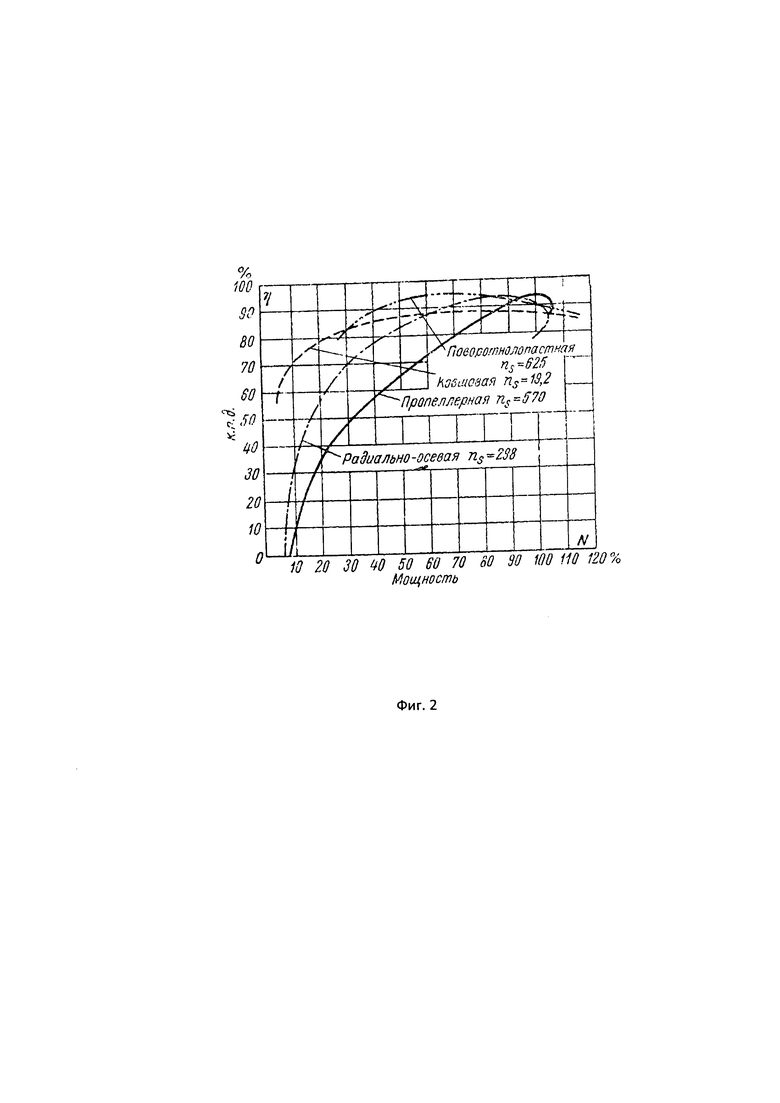
Сущность полезной модели поясняется чертежами. На фиг. 1 приведена блок-схема заявляемой системы автоматического управления мощностью гидроагрегата ГЭС, на фиг. 2 приведены зависимости КПД от полной мощности для различных типов ГТ.
На чертеже использованы следующие обозначения: гидротурбина 1, направляющий аппарат 2 гидротурбины, электрогидравлический усилитель 3, регулятор положения 4 направляющего аппарата, сервомотор 5, датчик положения 6 направляющего аппарата, блок формирования значения положения 7 направляющего аппарата, датчик уровня воды в верхнем бьефе 8, фильтр высокочастотных колебаний 9, нелинейный элемент 10, ручной задатчик напора 11, блок ручного управления 12, датчики частоты вращения 13 ротора, гидрогенератор 14, трансформатор 15, электроэнергетическая сеть 16, регулятор кинетической энергии вращения рабочего колеса 17 гидротурбины, задатчик кинетической энергии вращения рабочего колеса 18, блок умножения 19, первый блок дифференцирования 20, фильтры высокочастотных помех 21, регулятор мощности 22, датчик мощности гидрогенератора 23, формирователь ограничений 24, подсистема ограничений диапазона изменения нагрузки 25, подсистема ограничений скорости изменения нагрузки 26, устройство компенсации 27 внешнего контролируемого возмущения по уровню/напору воды, формирователь задания 28, задатчик плановой мощности 29, задатчик неплановой мощности 30, датчик частоты 31 в электроэнергетической сети, формирователь сигнала по отклонению частоты 32, задатчик значения частоты 33 в электроэнергетической сети, нелинейный элемент 34, частотный преобразователь 35, второй блок дифференцирования 36, устройство компенсации 37, блок ручного переключения 38.
Система автоматического управления мощностью гидроагрегата ГЭС содержит гидротурбину 1 с направляющим аппаратом 2. Гидротурбина снабжена датчиками частоты вращения 13 ротора. Направляющий аппарат 2 соединен посредством электрогидравлического усилителя 3 и регулятора положения 4 с сервомотором 5. Направляющий аппарат 2 снабжен датчиком положения 6, который посредством отрицательной обратной связи соединен с регулятором положения 4, к которому подключен блок формирования значения положения 7. Последовательно соединенные датчик уровня воды в верхнем бьефе 8, фильтр высокочастотных колебаний 9, нелинейный элемент 10 подключены к первому входу блока ручного управления 12. Ко второму входу блока ручного управления 12 подключен ручной задатчик напора 11. Выход блока ручного управления 12 подключен к входу устройства компенсации 27 внешнего контролируемого возмущения по уровню/напору воды. Датчик частоты 31 в электроэнергетической сети и задатчик значения частоты 33 в электроэнергетической сети подключены к формирователю сигнала по отклонению частоты 32. Формирователь сигнала по отклонению частоты 32 соединен через нелинейный элемент 34 с частотным преобразователем 35. Датчик мощности гидрогенератора 23 подключен к первому отрицательному входу регулятора мощности 22. Ко второму положительному входу регулятора мощности 22 подключен формирователь задания 28 соединенный с задатчиком плановой мощности 29 и задатчиком неплановой мощности 30. Выход регулятора мощности 22 подключен через блок ручного переключения 38 к формирователю ограничений 24 соединенному с подсистемой ограничений диапазона изменения нагрузки 25 и с подсистемой ограничений скорости изменения нагрузки 26. Фильтры высокочастотных помех 21 подключены к соответствующим датчикам частоты вращения 13 и соединены с соответствующими входами блока умножения 19. Выход блока умножения 19 подключен к первому входу регулятора кинетической энергии вращения рабочего колеса 17 гидротурбины и к первому блоку дифференцирования 20, выходом подключенного ко второму отрицательному входу регулятора кинетической энергии вращения рабочего колеса 17 гидротурбины. К третьему входу регулятора кинетической энергии вращения рабочего колеса 17 подключен формирователь ограничений 24. С четвертым входом регулятора кинетической энергии вращения рабочего колеса 17 соединен задатчик кинетической энергии вращения рабочего колеса 18. К пятому входу регулятора кинетической энергии вращения рабочего колеса 17 подключено устройство компенсации 27 внешнего контролируемого возмущения по уровню воды. Выход регулятора кинетической энергии вращения рабочего колеса 17 гидротурбины соединен с сервомотором 5. Датчик мощности гидрогенератора 23 через второй блок дифференцирования 36 подключен к третьему входу регулятора мощности 22. Частотный преобразователь 35 через устройство компенсации 37 внешнего контролируемого возмущения по изменению частоты в сети соединен с четвертым входом регулятора мощности 22.
Заявляемая система автоматического управления мощностью гидроагрегата ГЭС путем регулирования расхода воды, как термодинамического рабочего тела, через гидротурбину, представляет собой иерархическую трехуровневую структуру, на каждом уровне которой решаются соответствующие технологические задачи управления.
Первый базовый уровень «машины и регулятора» реализуют гидротурбина (ГТ) 1 с направляющим аппаратом (НА ГТ) 2 электрогидравлический усилитель 3, регулятор положения 4, сервомотор 5, датчик положения 6, блок формирования значения положения 7 НА ГТ. Блок формирования значения положения 7 НА ГТ является задатчиком расчетного/оптимального значения угла открытия НА 2 ГТ 1. Регулятор положения 4 (П-регулятор) угла поворота НАГТ является сумматором местной отрицательной обратной связи. ГТ 1, связана валом с гидрогенератором (ГГ) 14, который посредством трансформатора 15 синхронизирован с электроэнергетической сетью (ЭЭС) 16. ГТ 1 снабжена датчиками частоты вращения 13 ротора.
Второй иерархический уровень регулирования режимом потока реализуют: регулятор кинетической энергии вращения рабочего колеса 17 ГТ, задатчик кинетической энергии вращения рабочего колеса 18, блок умножения 19, первый блок дифференцирования 20, фильтры высокочастотных помех 21, устройство компенсации 27 внешнего контролируемого возмущения по уровню воды от датчика уровня воды в верхнем бьефе 8 посредством фильтра высокочастотных колебаний 9, нелинейного элемента 10, блока ручного управления 12 и ручного задатчика напора 11.
Третий иерархический уровень управления мощностью Г" А реализуют: регулятор мощности 22 (ПИ-регулятор), датчик мощности ГГ 23, формирователь ограничений 24, подсистема ограничений диапазона изменения нагрузки 25, подсистема ограничений скорости изменения нагрузки 26, формирователь задания 28 по мощности, задатчик плановой мощности 29, задатчик неплановой мощности 30, датчик частоты 31 в электроэнергетической сети, формирователь сигнала по отклонению частоты 32, задатчик значения частоты 33 в электроэнергетической сети, нелинейный элемент 34, частотный преобразователь 35, второй блок дифференцирования 36, устройство компенсации 37 внешнего контролируемого возмущения по изменению частоты в сети, блок ручного переключения 38.
Иерархическая трехуровневая структура заявляемой САУМ обеспечивает требуемое качество переходных процессов расхода воды через ГТ путем поддержания кинетической энергии вращения ГТ на некотором заданном докритическом значении энергии кавитации, а так же эффективное участие ГА в первичном регулировании частоты в условиях балансирующего рынка электроэнергии и мощности с учетом конкретных особенностей типа ГТ.
Диапазон эффективного регулирования по мощности определяется типом ГТ (фиг. 2). При этом в качестве датчиков 13 частоты вращения рабочего колеса может быть использован датчик частоты напряжения ГГ ГА, при этом используют фильтры высокочастотных помех 21 выполненные с возможностью фильтрации высокочастотной составляющей сигналов от датчиков частоты напряжения ГГ ГА.
Регулятор кинетической энергии вращения рабочего колеса 17 ГТ на втором базовом уровне иерархической САУМ реализует способ регулирования кинетической энергии вращения рабочего колеса ГТ путем измерения скорости вращения рабочего колеса ГТ и изменения угла открытия НА ГТ. При этом кинетическую энергию вращения рабочего колеса ГТ измеряют путем определения квадрата скорости вращения рабочего колеса ГТ и формированием квадратичной отрицательной обратной связи, а также формируют сигнал по скорости изменения комплексированного сигнала путем его дифференцирования, при этом кинетическую энергию вращения поддерживают на заданном для конкретной ГТ значении, которое ограничивают на уровне, не превышающим значения энергии кавитации для управляемой ГТ, а параметры дифференцирования определяют по критерию «плавности» скорости вращения. Иными словами, устройство дифференцирования комплексированного сигнала позволяет сформировать свойство монотонности переходных процессов в широком диапазоне нагрузок, соответственно устранить колебания/провалы давления водяного потока, вследствие которых возникают процессы кавитации, и обеспечить структурную устойчивость подсистемы управления потоком.
Система автоматического управления мощностью гидроагрегата ГЭС работает следующим образом.
Встроенный регулятор положения 4 обеспечивает перемещение НА 2 ГТ по командам от сервомотора 5 (при ручном управлении) и регулятора кинетической энергии вращения рабочего колеса 17 при автоматическом поддержании режима работы ГА. При этом регулятор кинетической энергии вращения рабочего колеса 17 выполняет задачу стабилизации заданной регулятором мощности 22 нагрузки ГТ по значению кинетической энергии вращения рабочего колеса ГТ путем измерения квадрата скорости вращения рабочего колеса ГТ ГА и скорости изменения квадратичного сигнала в качестве отрицательной обратной связи. Иными словами, регулятор кинетической энергии вращения рабочего колеса 17 выполнен с контуром отрицательной обратной связи, сформированной посредством датчиков частоты вращения 13, фильтров высокочастотных помех 21, блока умножения 19 и блока дифференцирования 20, при этом наблюдаемый сигнал/параметр датчиков частоты вращения 13 после прохождения соответствующих фильтров высокочастотных помех 21 посредством блока умножения 19 подается на отдельные входы регулятора кинетической энергии вращения рабочего колеса 17 и блока дифференцирования 20. Такое решение структурного синтеза устройства позволяет, во-первых, устранить колебательную составляющую переходных процессов базовой/встроенной электрогидравлической подсистемы «машина-регулятор» и, во-вторых, обеспечить ее структурную устойчивость. Иными словами, привести динамические характеристики базовой подсистемы, как сложного эквивалентного объекта, к монотонному виду, отвечающему требованиям эффективного управления, т.е. устранить колебания скоростей и давлений термодинамического рабочего тела на лопатках рабочего колеса и тем самым устранить возможность возникновения/проскоков кавитационных всплесков.
Блок ручного переключения 38 (переключатель «авт/дист») обеспечивает технологичность процесса поэтапного ввода иерархической структуры устройства управления.
Заданное расчетное значение кинетической энергии от блока 18 может быть определено по конструктивному показателю числа к кавитации или кавитационного показателя а ГТ, при этом заданное значение кинетической энергии должно быть не больше критического значения, определяемого энергией кавитации для конкретного типа ГТ.
Например, если в сплошном потоке жидкости скорости увеличиваются от  до
до  то, согласно общим законам гидродинамики, кинетическая энергия возрастает, а давление падает от
то, согласно общим законам гидродинамики, кинетическая энергия возрастает, а давление падает от  до
до  Если
Если  понизится до некоторого критического давления
понизится до некоторого критического давления  при котором возникает кавитация, т.е. до
при котором возникает кавитация, т.е. до  то соответствующее значение параметра
то соответствующее значение параметра  означает начало кавитации. Очевидно, что при
означает начало кавитации. Очевидно, что при  и соответственно
и соответственно  кавитации не будет и, наоборот, при
кавитации не будет и, наоборот, при  и
и  кавитация будет развитой.
кавитация будет развитой.
Регулятор мощности 22 выполнен с контуром отрицательной обратной связи, формируемой датчиком мощности 23 ГГ и блоком дифференциаторования 36, характеризующим скорость изменения параметра, что позволяет обеспечить высокоточную стабилизацию мощности ГА. Динамическая настройка заявляемой САУМ выполняется па основе сформированных монотонных динамических характеристик эквивалентного объекта. При этом задание регулятору мощности 22 формируется формирователем задания 28 по сигналам от задатчика плановой мощности 29 и задатчика неплановой мощности 30, как заданная (Nплановая + Nнеплановая) мощность, например, от группового регулятора активной мощности (ГРАМ), согласно предварительному диспетчерскому графику (ПДГ), который задает интервально-базовый режим работы ГА - рынок на сутки вперед. Частотный преобразователь 35 характеризует мощность текущего небаланса по частоте (балансирующий рынок) как внешнее контролируемое возмущение. При этом небаланс текущей мощности, как естественная ошибка планирования, формируется индивидуально для каждого ГА ГЭС по факторам его эффективных характеристик и текущего состояния и подается на вход регулятора мощности 22 посредством устройства компенсации 37 внешнего контролируемого возмущения.
При этом командный сигнал управления от регулятора мощности 22 на регулятор кинетической энергии вращения рабочего колеса 17 подается посредством блока 38, который обеспечивает технологичность ввода устройства и позволяет при необходимости, например, при отказе элементов регулятора мощности 22 (ГРАМ, система частотной коррекции и др.) перейти на интеллектуальное оперативное ручное управление (базовый режим).
Формирователь ограничений 24 определяет место ввода технологических ограничений в канале командного сигнала, формируют ограничения подсистема ограничений диапазона изменения нагрузки 25 и подсистема ограничений скорости изменения нагрузки 26 по условиям эффективного прохождения нестационарных режимов работы ГА (пуск/останов/аварийная разгрузка, например, как это реализовано в принятом прототипе) с учетом заданного блоком 18 ограничения но условиям возникновения явления кавитации.
Иными словами, для обеспечения необходимого качества регулирования мощностью ГА новое техническое решение позволяет обеспечить поддержание кинетической энергией вращения ротора ГА на докритическом значении, при этом качество переходных процессов удовлетворяет критерию «плавности» и требованиям стандартов при участии в поддержании общесистемных параметров. При этом области эффективной работы (область максимального КПД) различных типов ГА задаются исходя из их особенностей (см. фиг. 2). Для радиально-осевой ГТ диапазон эффективного изменения нагрузки обеспечивается статической настройкой САУМ (регулятор мощности 22 и устройства компенсации 3 7) и составляет примерно 30% (100-70%) Nном. Не трудно видеть, что расширение диапазона регулирования мощности до 60% (100-40%) ведет к снижению КПД радиально-осевой ГТ до 80%. При более глубоком регулировании КПД ГА существенно уменьшается до 60-50%) и менее, что нельзя считать областью эффективного автоматического регулирования (следует рассматривать как область нештатного предаварийного управления).
Надо также отметить, что САУМ ГА работает в общей структуре многофункциональной АСУТП на базе ПТК, которая относится к классу интеллектуальных эргатических систем. Поэтому задатчик 7 положения направляющего аппарата ГТ, задатчик 18 кинетической энергии, задатчик 28 ПДГ в иерархической структуре сложной системы представляют собой средства интеллектуальной коррекции при оптимизации режима вследствие проявления разного рода неконтролируемых возмущений; при этом сервомотор 5, блок ручного управления 12 и блок ручного переключения 38 предназначены не только для обеспечения технологичности наладки (ввода системы в действие), по также как средство возможного интеллектуального вмешательства в работу сложной системы в условиях реальной эксплуатации ГА ГЭС (оперативный доступ на видеограмме за один клик).
В результате сформированы такие особенности рассматриваемого ГА, которые формируют эффективные режимы его работы, и в которых, с одной стороны, отсутствуют колебательные переходные процессы, как одно из условий возникновения фактора кавитации, а с другой - выполняются заданные требования гарантий регулирования, а также общесистемные критерии эффективного управления активной мощностью.
Изобретение относится к гидроэнергетике, к системам автоматического управления мощностью гидроагрегата ГЭС путем регулирования потока воды через гидротурбину, которая работает в широком диапазоне регулируемых нагрузок гидроагрегата. Система содержит гидротурбину с направляющим аппаратом, который посредством электрогидравлического усилителя и регулятора положения направляющего аппарата соединен с сервомотором, датчики частоты вращения ротора гидротурбины и датчик положения направляющего аппарата, соединенного с регулятором положения отрицательной обратной связью, блок формирования значения положения направляющего аппарата; последовательно соединенные датчик уровня воды в верхнем бьефе, фильтр высокочастотных колебаний, нелинейный элемент, подключенные к первому входу блока ручного управления, к второму входу которого подключен ручной задатчик напора; датчик частоты в электроэнергетической сети и задатчик значения частоты в электроэнергетической сети, подключенные к формирователю сигнала по отклонению частоты, соединенному через нелинейный элемент с частотным преобразователем; датчик мощности гидрогенератора, подключенный к первому отрицательному входу регулятора мощности, к второму положительному входу которого подключен формирователь задания, соединенный с задатчиком плановой мощности и с задатчиком неплановой мощности, выход регулятора мощности подключен через блок ручного переключения к формирователю ограничений, соединенному с подсистемой ограничений диапазона изменения нагрузки и с подсистемой ограничений скорости изменения нагрузки. Система дополнительно содержит регулятор кинетической энергии вращения рабочего колеса гидротурбины, задатчик кинетической энергии вращения рабочего колеса, блок умножения, два блока дифференцирования, фильтры высокочастотных помех, устройство компенсации внешнего контролируемого возмущения по уровню воды и устройство компенсации внешнего контролируемого возмущения по изменению частоты в сети. Изобретение направлено на повышение точности управления и эффективности участия гидроагрегата в режиме поддержания общесистемных параметров. 1 з.п. ф-лы, 2 ил.
1. Система автоматического управления мощностью гидроагрегата ГЭС, содержащая гидротурбину с направляющим аппаратом, который посредством электрогидравлического усилителя и регулятора положения направляющего аппарата соединен с сервомотором, датчики частоты вращения ротора гидротурбины и датчик положения направляющего аппарата, который соединен с регулятором положения по принципу отрицательной обратной связи, и блок формирования значения положения направляющего аппарата; последовательно соединенные датчик уровня воды в верхнем бьефе, фильтр высокочастотных колебаний, нелинейный элемент, подключенные к первому входу блока ручного управления, к второму входу которого подключен ручной задатчик напора; датчик частоты в электроэнергетической сети и задатчик значения частоты в электроэнергетической сети, подключенные к формирователю сигнала по отклонению частоты, соединенному через нелинейный элемент с частотным преобразователем; датчик мощности гидрогенератора, подключенный к первому отрицательному входу регулятора мощности, к второму положительному входу которого подключен формирователь задания, соединенный с задатчиком плановой мощности и с задатчиком неплановой мощности, выход регулятора мощности подключен через блок ручного переключения к формирователю ограничений, соединенному с подсистемой ограничений диапазона изменения нагрузки и с подсистемой ограничений скорости изменения нагрузки, отличающаяся тем, что дополнительно содержит регулятор кинетической энергии вращения рабочего колеса гидротурбины, задатчик кинетической энергии вращения рабочего колеса, блок умножения, два блока дифференцирования, фильтры высокочастотных помех, устройство компенсации внешнего контролируемого возмущения по уровню воды и устройство компенсации внешнего контролируемого возмущения по изменению частоты в сети, при этом фильтры высокочастотных помех, подключенные к соответствующим датчикам частоты вращения, соединены с соответствующими входами блока умножения, выход которого подключен к первому входу регулятора кинетической энергии вращения рабочего колеса гидротурбины и к первому блоку дифференцирования, выходом подключенного к второму отрицательному входу регулятора кинетической энергии вращения рабочего колеса гидротурбины, к третьему входу которого подключен формирователь ограничений, с четвертым входом соединен задатчик кинетической энергии вращения рабочего колеса, к пятому входу подключено устройство компенсации внешнего контролируемого возмущения по уровню воды, соединенное с выходом блока ручного управления, а выход регулятора кинетической энергии вращения рабочего колеса гидротурбины соединен с сервомотором, притом датчик мощности гидрогенератора через второй блок дифференцирования подключен к третьему входу регулятора мощности, а частотный преобразователь через устройство компенсации внешнего контролируемого возмущения по изменению частоты в сети соединен с четвертым входом регулятора мощности.
2. Система автоматического управления мощностью гидроагрегата ГЭС по п. 1, отличающаяся тем, что в качестве датчиков частоты вращения ротора гидротурбины используют датчики частоты напряжения гидрогенератора гидроагрегата, при этом используют фильтры высокочастотных помех, выполненные с возможностью фильтрации высокочастотной составляющей сигналов от датчиков частоты напряжения гидрогенератора гидроагрегата.
| УСТРОЙСТВО КОНТРОЛЯ СКОРОСТИ ДЛЯ РЕГУЛЯТОРА СКОРОСТИ ГИДРОТУРБИНЫ | 2005 |
|
RU2292483C1 |
| Система для автоматического управления активной мощностью гидроэлектростанции | 1985 |
|
SU1358061A1 |
| Устройство для автоматического управления активной мощностью гидроагрегата | 1984 |
|
SU1192097A1 |
| Устройство для автоматического управления активной мощностью гидроэлектростанции | 1982 |
|
SU1034142A1 |
| CN 111997825 A, 27.11.2020 | |||
| WO 2019185267 A1, 03.10.2019. | |||

