Изобретение относится к сейсмометрии и может быть использовано для калибровки сейсмоприемников.
Цель изобретения - упрощение схемы испытаний, повышение точности и снижение трудоемкости, особенно для сейсмоприемников с подвижным магнитом.
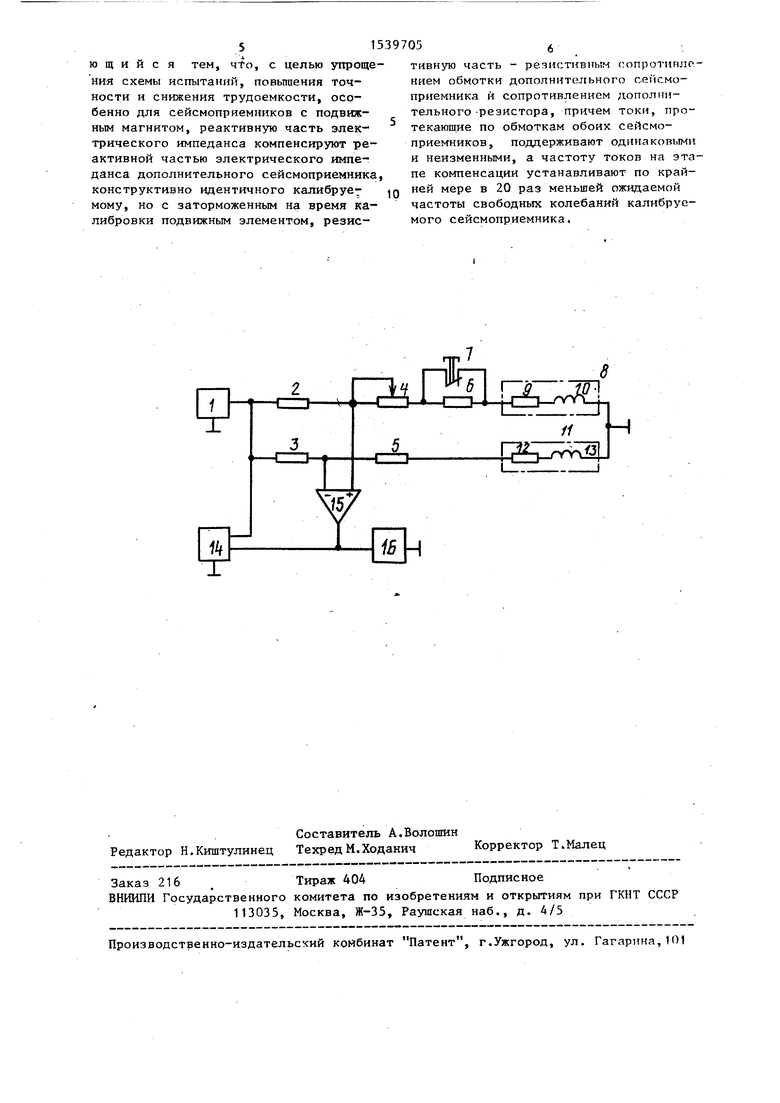
На чертеже приведена схема, реализующая предлагаемый способ.
Схема включает генератор 1 переменного тока, резисторы 2-6, нормально замкнутую кнопку 7, калибруемый индукционный сейсмоприемник (ИСП) 8, электрический импеданс которого состоит из активного 9 и реактивного 10 сопротивления обмотки, второго ИСП 11 (с заторможенным подвижным элементом) с импедансом, состоящим из активного 12 и реактивного 13 сопротивлений обмотки, электронного осциллографа 14, : синхронизированного генератором 1, дифференциального усилителя 15 и | вольтметра 16.
Генератор 1 обеспечивает питание схемы переменным током.
Сопротивление резисторов 2 и 3 равны. Кроме того, значение этих сопротивлений в 50 и более раз превышают половину поля допуска на резистивное сопротивление обмотки 9.Благодаря этому токи, протекающие по обмоткам ИСП 8 и 11, точно равны после завершения начальной балансировки мостовой схемы резисторов 4 и-несущественно различаются на последующих этапах калибровки. Кроме того, благодаря указанному COOTHOUIRHI-DO ветичина тока в обмотке ИСП практически не меняется
сл
00 $0
О 01
при замене одного ИСП на другой, что позволяет измерять величину тока лишь на первом образце партии ИСП.
Последовательность калибровки следующая .
Частоту генератора 1 устанавливают в .20 и более раз меньшей ожидаемой частоты свободных колебаний калибруемого ИСП.
При этом модуль электромеханиче- эго iv- формуле
ского импеданса I Z.,., | вычисляемый по
У
К
о/
J5« ТТТ о +ТЛф1
где - относительная частота;
f - текущая частота;
fc собственная частота
сейсмоприемника} 2
Q - добротность сейсмоприем- ника}
га - масса подвижного магнита;
р
К - коэффициент электромеханической связи, близок к нулю, остаточное значение Z 3/л того же порядка, что и реальная погрешность ручной балансировки схемы Н% от половины поля допуска на сопро- 3 тивление обмотки ИСП).
Изменяя сопротивление резистора 4, добиваются близкого к нулю напряжения на входе вольтметра 16 и горизонтального положения траектории луча на 3 экране 14. Тем самым добиваются выполнения компенсации резистивной части электрического импеданса 9.
Одновременно, за счет конструктивной идентичности ИСП 8 и 11 обеспе- 4 чивается компенсация реактивной компоненты 10.
Таким образом достигается раздельная и, следовательно,, более точная - компенсация компонент электрического 4
импеданса калибруемого ИСП. I
Естественно, что нулевое напряжение
на выходе моста соответствует условию компенсации лишь в том случае, если токи, протекающие по обмоткам ИСП 8 и 11 равны.
Частоту генератора увеличивают до тех пор, пока эллипс на экране осциллографа 14 не вытянется в наклонную линию. При этом фиксируют искомую час-5 тоту свободных колебаний fc и максимальную величину выходного напряжения Ц,иксНаходят ток I, для чего измеряют приращение JU.выходного напряжения при прожатии кнопки 7, тогда
аи
R
v
где RЈ- сопротивление резистора 6.
Находят боковые частоты f, и fг , соответствующие принятому относительному уровню выходного напряжения, например 0,707.
Рассчитывают искомую добротность ИСП 8 по формуле
n fo
Q „ , .
1Е т -г I
Рассчитывают искомый коэффициент электромеханической, связи по формуле
|2Tf,n К - ----2lTf маке
7q
Очевидно, что все расчеты легко могут быть автоматизированы.
Таким образом определяют все три искомых параметра ИСП.
Предлагаемый способ калибровки позволяет достигнуть значительного упрощения испытательной схемы за счет исключения громоздкой цепи подмагничива ния, что стало возможным в результате перехода на балансировку при пониженной частоте питающего тока.
Кроме того, повышена точность компенсации электрического импеданса и, как следствие, точность определени искомых параметров - в результате перехода на раздельную компенсацию активной и реактивной его компонент.
Одновременно компенсируется и влияние короткозамкнутых витков в калибруемом ИСП.
Снижение трудоемкости достигается за счет того, что токи, протекающие по обмоткам обоих ИСП, поддерживают практически неизменными, например, за счет резисторов 2 и 3 с большим сопротивлением, что позволяет выполнять измерение величины тока лишь на первом образце от партии ИСП.
Формула изобретения
Способ калибровки индукционного сейсмоприемника по значениям его электромеханического импеданса при различных частотах тока возбуждения, предусматривающий компенсацию его электрического импеданса, о т л и ч ащ и и с я тем.
5
что,
153
с целью упрощения схемы испытаний, повышения точности и снижения трудоемкости, особенно для сейсмоприемников с подвижным магнитом, реактивную часть электрического импеданса компенсируют реактивной частью электрического импеданса дополнительного сейсмоприемняка, конструктивно идентичного калибруе мому, но с заторможенным на время калибровки подвижным элементом, резне1539705
тивную часть - речистивным сопротивлением обмотки дополнительного семсмо- приемника и сопротивлением дополнительного резистора, причем токи, протекающие по обмоткам обоих сейсмоприемников, поддерживают одинаковыми и неизменными, а частоту токов на этапе компенсации устанавливают по крайней мере в 20 раз меньшей ожидаемой частоты свободных колебаний калибруемого сейсмоприемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения параметров индукционного сейсмоприемника | 1985 |
|
SU1350531A1 |
| Способ определения коэффициента преобразования электродинамического сейсмоприемника с шунтом | 1988 |
|
SU1569762A1 |
| Низкочастотный стенд для калибровки и испытаний акселерометров и сейсмоприемников | 2019 |
|
RU2757971C2 |
| СПОСОБ КАЛИБРОВКИ СЕЙСМОГРАФОВ | 2006 |
|
RU2324208C1 |
| Устройство оперативной калибровки сейсмических каналов | 1987 |
|
SU1509770A1 |
| Способ определения параметров электродинамических сейсмоприемников | 1981 |
|
SU1022092A1 |
| Способ определения степени успокоения электромеханического преобразователя и устройство для его осуществления | 1988 |
|
SU1721568A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АКТИВНОЙ И ЕМКОСТНОЙ СОСТАВЛЯЮЩИХ ИМПЕДАНСА БИОЛОГИЧЕСКИХ ТКАНЕЙ | 2000 |
|
RU2196504C2 |
| Устройство для компенсации искажений в электродинамических сейсмометрах | 1989 |
|
SU1651257A1 |
| Устройство динамической калибровки чувствительных элементов компенсационных акселерометров | 1973 |
|
SU474741A1 |
Изобретение относится к области сейсмометрии и может быть использовано для калибровки сейсмоприемников, преимущественно с подвижным магнитом. Цель изобретения - упрощение схемы испытаний, повышение точности и снижение трудоемкости, особенно для сейсмоприемников с подвижным магнитом. Предложенный способ основан на компенсации электрической части импеданса сейсмоприемника, состоящего из активного и реактивного сопротивлений катушки. При этом компенсация производится путем использования сейсмоприемника конструктивно идентичного испытуемому, но с заторможенным подвижным элементом. Предложенный способ определения параметров сейсмоприемника позволяет значительно повысить точность компенсации импеданса за счет раздельной компенсации активной и реактивной его компонент.
| Аппаратура я методика сейсмометрических наблюдений в СССР /Под ред | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| М.: Наука, 1974, с | |||
| Способ прикрепления барашков к рогулькам мокрых ватеров | 1922 |
|
SU174A1 |
| Способ определения параметров электродинамических сейсмоприемников | 1981 |
|
SU1022092A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
