Изобретение относится к строи- тельным машинам, используемым для динамического воздействия на грунты свободно падающим грузом, например при разрушении мерзлых грунтов или - при уплотнении просадочных
Цель изобретения - повышение срока службы экскаватора за счет снижения динамических нагрузок на него.
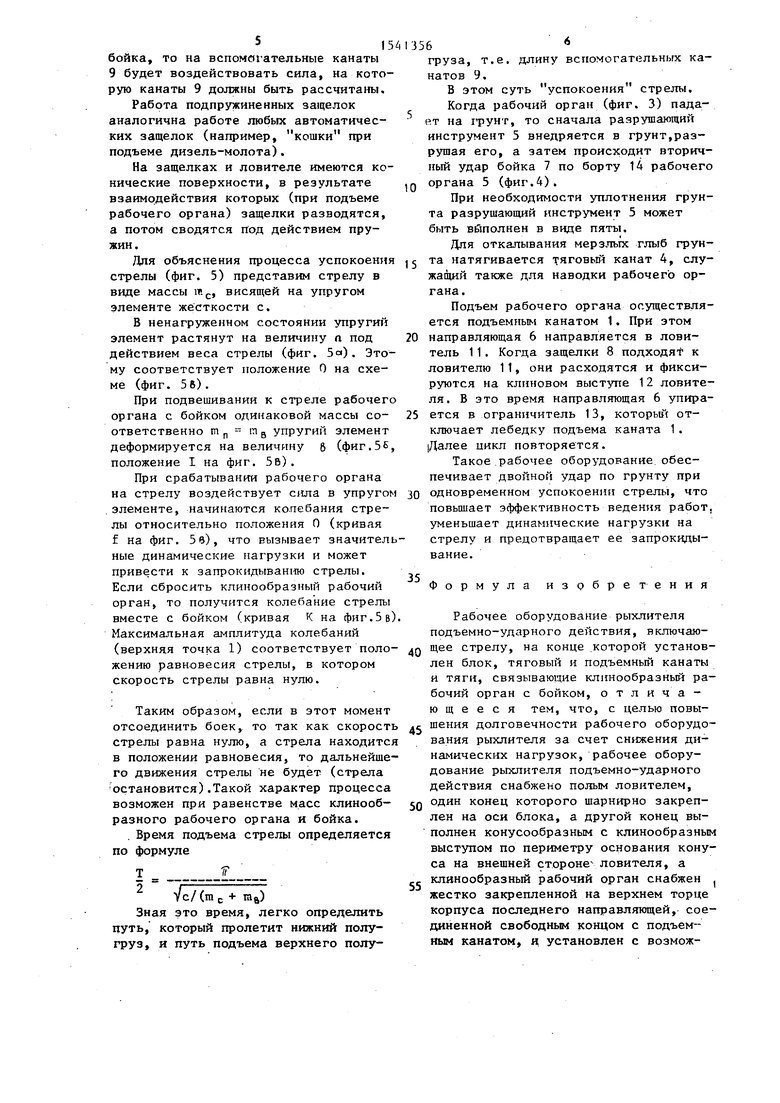
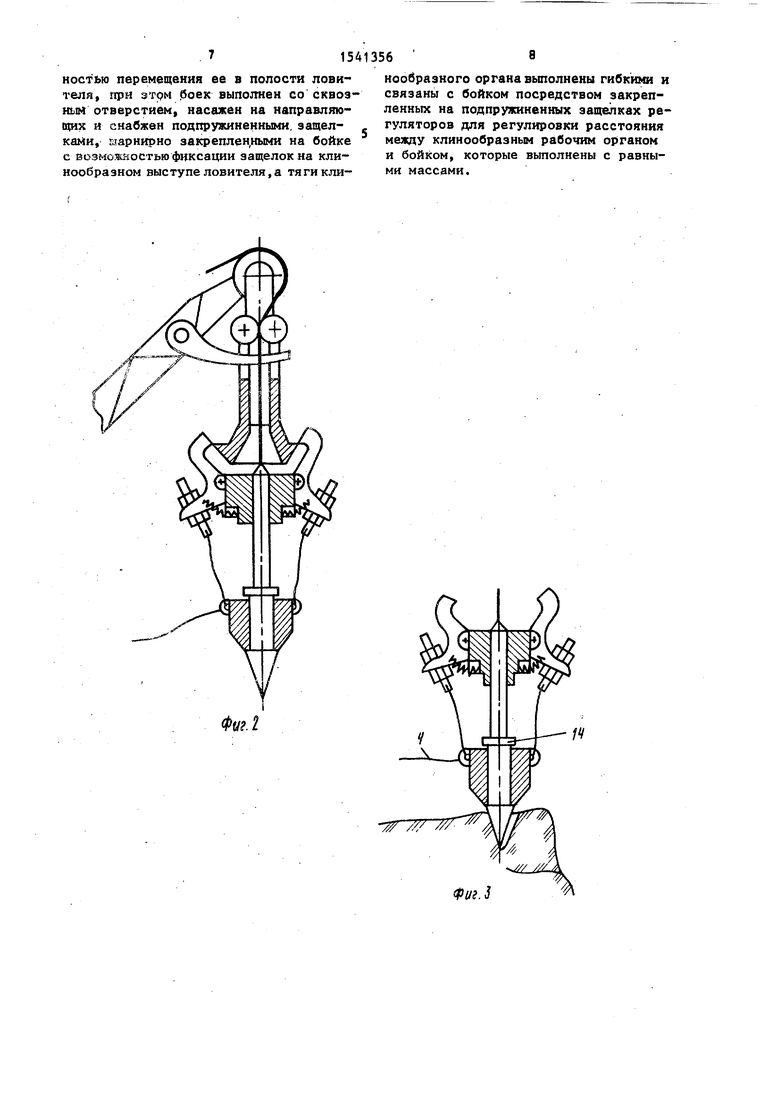
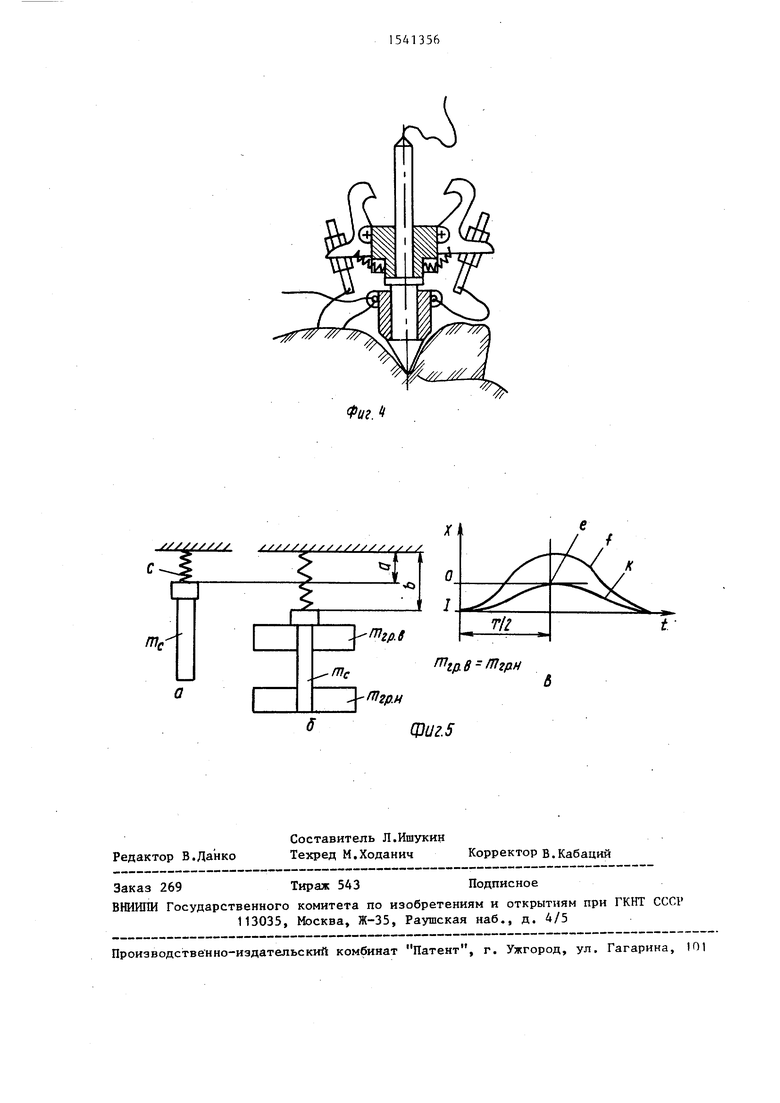
На фиг. 1 представлено рабочее оборудование, висящее на стреле; на фиг.2 - оборудование в момент сбрасывания верхнего полугруза , на фиг. 3 - то же, в момент удара нижним полугрузом по грунту; на фиг.4 - то же, в момент удара верхнего полугруза по нижнему, на фиг. 5 - схема, объясняющая процесс успокоения стрелы.
Рабочее оборудование состоит из подъемного каната 1, огибающих блоков 2, стрелы 3, тягового каната 4, кли- нообразного рабочего органа 5, включающего направляющую 6, соединенную свободным концом с подъемным канатом 1 бойка 7, выполненного со сквозным отверстием по оси бойка и снабженно- го подпружиненными защелками 8, шарнирно закрепленными на бойке.
Боек и клинообразный рабочий орган связаны гибкими канатами 9 через регуляторы 10, закрепленные на подпружиненных защелках и состоящие из регулировочных винтов с гайками. На оси блока 2 шарнирно закреплен одним концом полый ловитель 11, а другой его
конец выполнен конусообразным с клинообразным выступом 12 по периметру основания конуса на внешней стороне ловителя. На стреле 3 установлен ограничитель 13 верхнего хода направляющей 6. На клинообразном рабочем органе 5 имеется бурт 14. Масса клинообразного рабочего органа, включающего направляющую, и масса бойка с подпружиненными защелками и регуляторами равны.
Рабочее оборудование экскаватора работает следующим образом.
В поднятом положении (фиг.1) рабочий орган удерживается подъемным канатом 1 и подпружиненными защелками . 8. Для сбрасывания груза машинист освобождает подъемный канат 1, и направляющая 6 с клинообразным рабочим органом 5 свободно падает вместе с подъемным канатом 1. В это время стрела 3 с ловителем 11 и закрепленным на ней с помощью подпружиненных защелок 8 бойком 7 начинает подъем вверх под действием внутренних сил растянутых стреловых канатов. Длина вспомогательных канатов 9 такова, что когда стрела с ловителем 11 и бойком 7, дви- гающаясЪ вверх, достигает наивысшей точки, то канаты 9 натягиваются (фиг. 2). Они поворачивают защелки 8, преодолевая усилия пружин, и освобождают боек 7. Последний начинает свободное падение. Так как скорость клинообразного рабочего органа выше, чем
315
бойка, то на вспомогательные канаты 9 будет воздействовать сила, на которую канаты 9 должны быть рассчитаны.
Работа подпружиненных защелок аналогична работе любых автоматических защелок (например, кошки при подъеме дизель-молота).
На защелках и ловителе имеются конические поверхности, в результате взаимодействия которых (при подъеме рабочего органа) защелки разводятся, а потом сводятся под действием пружин.
Для объяснения процесса успокоения стрелы (фиг. 5) представим стрелу в виде массы гкс, висящей на упругом элементе жесткости с.
В ненагруженном состоянии упругий элемент растянут на величину п под действием веса стрелы (фиг, 5а). Этому соответствует положение 0 на схеме (фиг. 5в).
При подвешивании к стреле рабочего органа с бойком одинаковой массы соответственно mn гпБ упругий элемент деформируется на величину б (фиг.5Б, положение I на фиг. 5в).
При срабатывании рабочего органа на стрелу воздействует сила в упругом элементе, начинаются колебания стрелы относительно положения 0 (кривая f на фиг. 5 в), что вызывает значительные динамические нагрузки и может привести к запрокидыванию стрелы. Если сбросить клинообразный рабочий орган, то получится колебание стрелы вместе с бойком (кривая К на фиг.5 в) Максимальная амплитуда колебаний (верхняя точка 1) соответствует положению равновесия стрелы, в котором скорость стрелы равна нулю.
Таким образом, если в этот момент отсоединить боек, то так как скорость стрелы равна нулю, а стрела находится в положении равновесия, то дальнейшего движения стрелы не будет (стрела остановится).Такой характер процесса возможен при равенстве масс клинообразного рабочего органа и бойка.
Время подъема стрелы определяется по формуле
Т7Г
Vc/(rac + таа)
Зная это время, легко определить путь, который пролетят нижний полугруз, и путь подъема верхнего полу-
66
груза, т.е. длину вспомогательных канатов 9.
В этом суть успокоения стрелы. Когда рабочий орган (фиг. 3) падает на грунт, то сначала разрушающий инструмент 5 внедряется в грунт,разрушая его, а затем происходит вторичный удар бойка 7 по борту 14 рабочего
органа 5 (фиг.4).
При необходимости уплотнения грунта разрушающий инструмент 5 может быть выполнен в виде пяты.
Для откалывания мерзлых глыб грунта натягивается тяговый канат 4, служащий также для наводки рабочего органа.
Подъем рабочего органа осуществляется подъемным канатом 1. При этом
направляющая 6 направляется в ловитель 11. Когда защелки 8 подходят к ловителю 11, они расходятся и фиксируются на клиновом выступе 12 ловителя. В это время направляющая 6 упирается в ограничитель 13, который отключает лебедку подъема каната 1. |Далее цикл повторяется.
Такое рабочее оборудование обеспечивает двойной удар по грунту при
одновременном успокоении стрелы, что повышает эффективность ведения работ, уменьшает динамические нагрузки на стрелу и предотвращает ее запрокидывание.
35
Формула изобретения
Рабочее оборудование рыхлителя подъемно-ударного действия, включающее стрелу, на конце которой установлен блок, тяговый и подъемный канаты и тяги, связывающие клинообразный рабочий орган с бойком, отличающееся тем, что, с целью повышения долговечности рабочего оборудования рыхлителя за счет снижения динамических нагрузок, рабочее оборудование рыхлителя подъемно-ударного действия снабжено полым ловителем,
один конец которого шарнирно закреплен на оси блока, а другой конец выполнен конусообразным с клинообразным выступом по периметру основания конуса на внешней стороне4 ловителя, а
клинообразный рабочий орган снабжен ( жестко закрепленной на верхнем торце корпуса последнего направляющей, соединенной свободным концом с подъемным канатом, и установлен с возможкостью перемещения ее в полости ловителя, при этом боек выполнен со сквозным отверстием, насажен на направляющих и снабжен подпружиненными, защелками, парнирно закрепленными на бойке с возможностью фиксации защелок на клинообразном выступе ловителя, а тя ги кли356 8
нообраэного органа выполнены гибкими и связаны с бойком посредством закрепленных на подпружиненных защелках регуляторов для регулировки расстояния между клинообразным рабочим органом и бойком, которые выполнены с равными массами.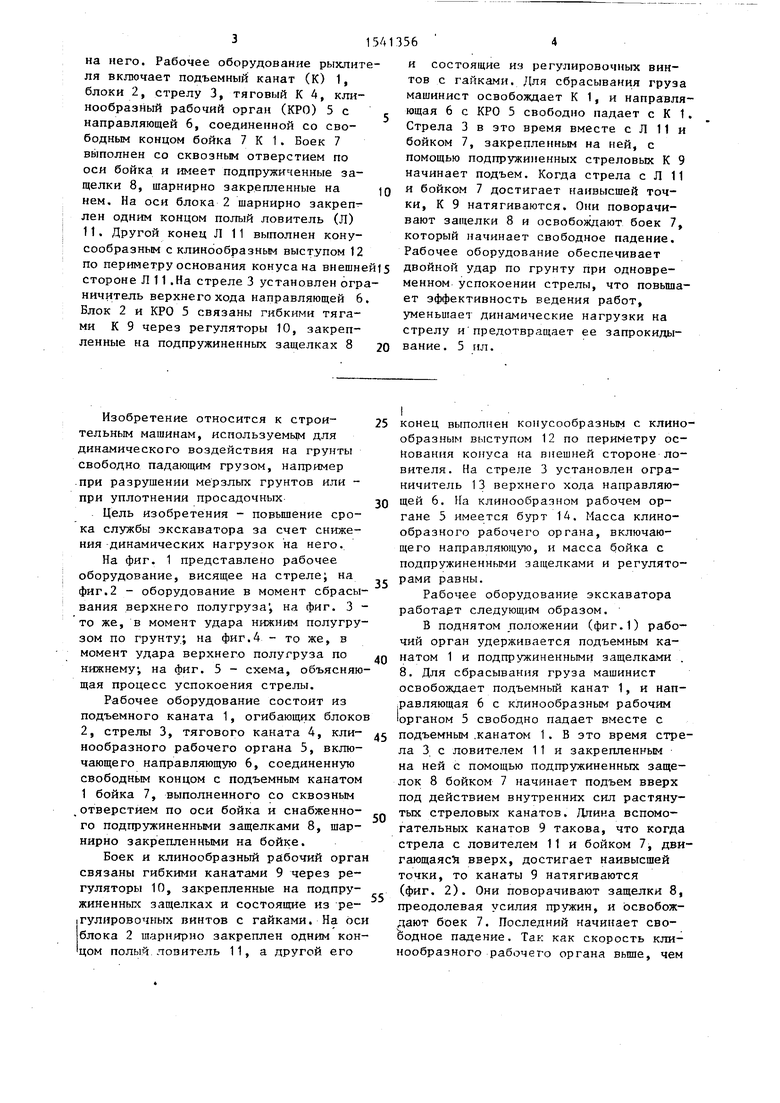
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для рыхления прочныхгРуНТОВ | 1979 |
|
SU823513A1 |
| Рыхлитель подъемно-ударного действия | 1982 |
|
SU1059087A1 |
| НАВЕСНОЕ ОБОРУДОВАНИЕ ДЛЯ РЫХЛЕНИЯ ПРОЧНЫХ ГРУНТОВ | 1992 |
|
RU2092657C1 |
| НАВЕСНОЕ ОБОРУДОВАНИЕ ДЛЯ РЫХЛЕНИЯ ПРОЧНЫХ ГРУНТОВ | 1992 |
|
RU2092655C1 |
| НАВЕСНОЕ ОБОРУДОВАНИЕ ДЛЯ РЫХЛЕНИЯ ПРОЧНЫХ ГРУНТОВ | 1992 |
|
RU2092656C1 |
| Рыхлитель | 1980 |
|
SU899796A1 |
| Навесное оборудование для рыхления прочных грунтов | 1979 |
|
SU783425A2 |
| НАВЕСНОЕ ОБОРУДОВАНИЕ ДЛЯ РЫХЛЕНИЯ ПРОЧНЫХ ГРУНТОВ | 1991 |
|
RU2014408C1 |
| НАВЕСНОЕ ОБОРУДОВАНИЕ ДЛЯ РЫХЛЕНИЯ ПРОЧНЫХ ГРУНТОВ | 1992 |
|
RU2047699C1 |
| Рабочий орган для рыхления мерзлых и плотных грунтов | 1983 |
|
SU1105575A1 |
Изобретение относится к строительным машинам, используемым для динамического воздействия на грунты свободно падающим грузом, например при разрушении мерзлых грунтов или при уплотнении просадочных. Цель - повышение срока службы экскаватора за счет снижения динамических нагрузок на него. Рабочее оборудование рыхлителя включает подъемный канат (К) 1, блоки 2, стрелу 3, тяговый К 4, клинообразный рабочий орган (КРО) 5 с направляющей 6, соединенной со свободным концом бойка 7 К 1. Боек 7 выполнен со сквозным отверстием по оси бойка и имеет подпружиненные защелки 8, шарнирно закрепленные на нем. На оси блока 2 шарнирно закреплен одним концом полый ловитель (Л) 11. Другой конец Л 11 выполнен конусообразным с клинообразным выступом 12 по периметру основания конуса на внешней стороне Л 11. На стреле 3 установлен ограничитель верхнего хода направляющей 6. Блок 2 и КРО 5 связаны гибкими тягами (К9) через регуляторы 10, закрепленные на подпружиненных защелках 8 и состоящие из регулировочных винтов с гайками. Для сбрасывания груза машинист освобождает К 1, и направляющая 6 с КРО 5 свободно падает с К 1. Стрела 3 в это время вместе с Л 11 и бойком 7, закрепленным на ней, с помощью подпружиненных стреловых К 9 начинает подъем. Когда стрела с Л 11 и бойком 7 достигает наивысшей точки. К 9 натягиваются. Они поворачивают защелки 8 и освобождаю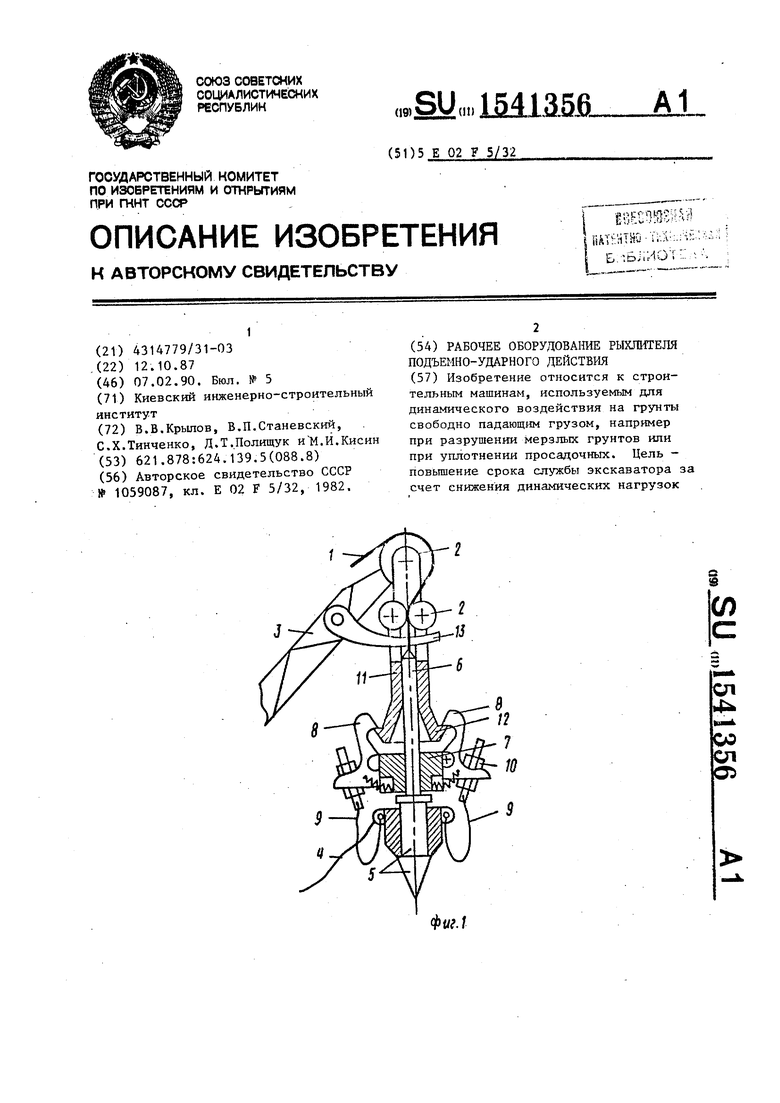
Фиг.2
Фм.З
Г У/ Я
Х/ХХ/Х//Х
I
/77/.
fTJf
о. 1
Мгр.в
П7гр.8 Мгрн
Фиг.5
| Рыхлитель подъемно-ударного действия | 1982 |
|
SU1059087A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
