Изобретение относится к электро- технике и измерительной технике и может быть использовано для исследования характеристик гистерезисных
машин,,
Цель изобретения - расширение функциональных возможностей за счет увеличения номенклатуры исследуемых материалов ротора.
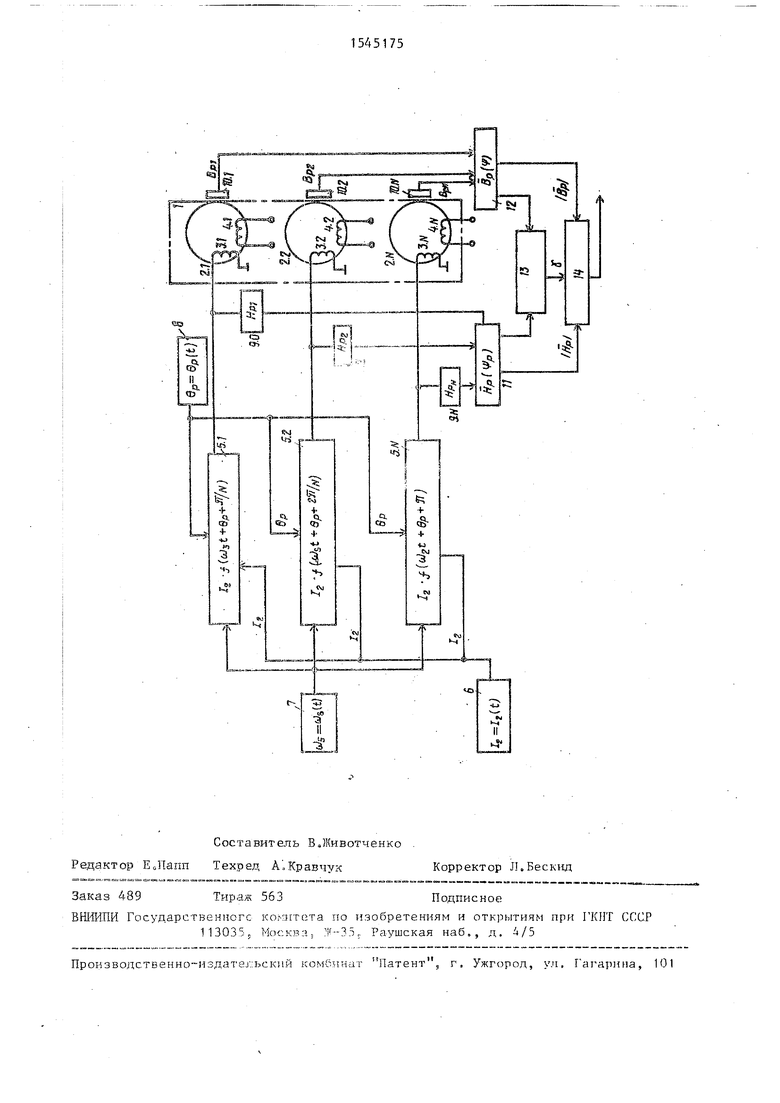
На чертеже представлена функциональная схема идентификатора маг- нитного состояния ротора гистерезис- ной машины.
Схема содержит имитатор 1 ротора, выполненный в виде N замкнутых магнитопроводов 2.1, 2.2,..., 2.N, активная часть которых состоит из материала ротора гистерезисной машины, а имитатор статора состоит из N намагничивающих обмоток 3.1 3.2,..., 3.No На магнитопроводе могут быть расположены дополнительные обмотки 4.1, 4.2,...4.N, используемые для калибровки системы измерения составляющих поля, например, индукционным методом Формирователи 5.1, 5.2,... 5 N заданной величины и функции распределения магнитодвижущей силы ротора в обще м случае реализуют функцию пространственного сдвига периоличесел
Где
СЛ
«с&
315
.кого сигнала перемагничивания I9 + 0р+ KF/N), где 1$ - ток, задаваемый блоком задания результирующего тока, приложенного к ротору, - формируется блоком 6, f(u)st + @р + Kf/N) - функция рас пределения магнитодвижущей силы по расточке статора и соответственно ротора, реализуемая формирователем 5 „К, К 1, 2, ,,., N. Перемагнинивание каждой точки ротора осуществляется с частотой скольжения W5, формируемой блоком 7 и в соотвествии с. угловой координатой ротора F/N относительно произвольно выбранного исход- ного состояния.
При частоте скольжения W5 : 0 угловое положение кривой распределения магнитодвижущей силы изменяется в соответствии с законом изменения уг - ла ® f (t), задаваемого блоком С задания угла поворота.
Блоки формирователей заданной величины и функции распределения магнитодвижущей силы ротора соединены входами с выходами блоков 6 - 8, а их выходы соединены с намагничивающими обмотками 3.1, 3,2, .,., 3.N каждого магнитопровода.
Блоки 9.1, 9,2Э ... 9.N измерения напряженности и блоки 10.1, 10„2, ... 10.N индукции выходами соединены с блоками 11 и 12 нахождения результирующих значений первых гармоник распределения напряженности и индукции соответственно, выходы которых подклю- чены к блоку 13 определения угла взаимного сдвига векторов напряженности и индукции. Кроме того, выходы блоков 11-13 могут быть подключены к блоку 14 выполнения электромагнитно- го момента гистерезисной машины.
Функциональная модель идентификатора состояния ротора гистерезисной машины предусматривает физико-аналитическое определение составляющих по ля ротора с дальнейшим1вычислением момента.
Физическая часть модели содержит N замкнутых магнитопроводов 2.1, 2.2, ... 2.N, которые выполнены ли- бо полностью из материала ротора гистерезисной машины, либо частично, но таким образом, что основная доля падения магнитного потенциала
F Нр1р+ Нь НК1М(1)
приходилась на Нр1р, характеризующую материал ротора. Дополнительная часть Н сГ и Н -V 1 ц - падение потек
-51
5„
5
50
0
5
0
45
75 - 4
циала в воздушных зазорах и магнитном замыкателе. На магнитопроводы намотаны намагничивающие обмотки 3.1, 3.2, ..., 3.N, а также вспомогательные для цепей калибровки датчиков индукции и контроля.
Каждая намагничивающая обмотка через датчик тока соединена с собственным формирователем заданной величины и формы .распределения МДС,Формируемые этими блоками функции временного изменения тока подчиняются следующей закономерности:
IIK V4(Yp) -sin(w5t + к -|-)s (2)
где Ij-iKVp) - закон распределения по ротору напряженности поля, , 2, ..., N.
Если принято гармоническое распределение напряженности, то ) заменяется эквивалентной величиной Ilrrio Величина тока 12 определяется экспериментально или рассчитывается из схемы замещения гистерезисной машины. Все формирователи 5.1, 5.2, ... 5.N синхронизованы общим генератором частоты скольжения (блок 7). Выполнение формирователей заданной формы и величины функции распределения ОДС может быть различным. Блоки определения напряженности поля в каждом магнитопроводе могут быть построены, в частности, на базе датчиков тока с последующим пересчетом тока в напряженность. Блоки определения индукции также построены на базе методов измерения индукции. В них целесообразно использование преобразователей Холла
Блоки 11 и 12 нахождения векторов напряженности Нр()И- и индукции Вр (v) представляет собой вычислительные блоки, осуществляющие нахождение результирующих векторов в системе координат ds и qs, вращающейся , с частотой скольжения ы . .
Сумма проекций мгновенных значений напряженности на оси ds и qs равна
иN
гН „0 ЗД, si n ц/ и 4EHBC,ZH ;соз у., где уч v
Н- - мгновенные значения напряженности (тока), определяемые блоками 9.1, 9о2s .со, 9.N, а цл i-|положения элементов ротора на полюсном делении.
Определение и расчет взаимного положения векторов производится при од515451
повременном считывании и вычислении их составляющих в блоках 11 - 13.
Идентификатор позволяет имитировать процессы перемагничивания рото- ра гистерезисной машины в асинхронном режиме с любым уровнем потока, в синхронном режиме при изменении нагрузки и произвольном повороте ротора, при намагничивании и размагничивании ротора в асинхронном и синхронном режимах.
10
Формула изобретения
Идентификатор магнитного состояния ротора гистерезисной машины, содержащий имитатор ротора с установленными на нем системами определения напряженности и индукции магнитного поля и имитатор статора9 отличающийся тем, что, с целью расширения функциональных возможностей за счет увеличения номенклатуры исследуемых материалов ротора, имитатор ротора выполнен в виде N замкнутых магнитопроводов, активная часть которых выполнена из материала ротора гистерезисной машины, а имитатор статора состоит из N намагничивающих обмоток, каждая из которых расположена на отдельном магнитопроводе, при этом в устройство дополнительно введены N формирователей величины
0
5
0 5
0
75
и функции распределения магнитодвижущей силы ротора, генератор частоты скольжения, блок задания результирующего тока ротора, блок задания угла поворота, блоки нахождения результирующих значений первых гармоник распределения напряженности и индукции, блок определения угла взаимного сдвига векторов напряженности и индукции, а системы измерения напряженности и ицдукции состоят из блоков измерения напряженности и индукции каждого маг- нитопровода, при этом намагничивающие обмбтки каждого магннтопровода соединены с выходами формирователей величины и функции распределения магнитодвижущей силы ротора, входы которых соединены с блоком задания результирующего тока ротора, генератором частоты скольжения и блоком задания угла поворота, блоки измерения напряженности и индукции соединены соответственно своими выходами с блоками нахождения результирующих значений первых гармоник распределения напряженности и индукции, выходы которых подключены к блоку определения угла взаимного сдвига векторов напряженности индукции, где JV- число разбиений полюсного деления машиш; на элементарные объемы ротора, характеризуемые общим законом перемегничива- ния.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| ИМПУЛЬСНЫЙ ГИСТЕРЕЗИСНЫЙ МИКРОЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2027286C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| Способ контроля подшипников трехфазной электрической машины | 1983 |
|
SU1117750A1 |
| КОМБИНИРОВАННЫЙ РОТОР ДЛЯ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2014 |
|
RU2575920C2 |
| СПОСОБ ДВУХЗОННОГО АМПЛИТУДНО-ФАЗОВОГО ПЕРЕВОЗБУЖДЕНИЯ СИНХРОННО-ГИСТЕРЕЗИСНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2008 |
|
RU2375813C1 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158472C2 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158471C2 |
| Способ управления вентильным электродвигателем в режиме стопорения ротора | 1985 |
|
SU1300616A1 |
Изобретение относится к измерительной технике и может быть использовано для исследования характеристик гистерезистных машин. Целью изобретения является расширение функциональных возможностей за счет увеличения номенклатуры исседуемых материалов ротора. Эта цель достигается тем, что имитатор ротора выполнен в виде замкнутых магнитопроводов, активная часть которых состоит из материала ротора гистерезисной машины, а имитатор статора состоит из намагничивающих обмоток, расположенных на отдельных магнитопроводах. Система измерения состоит из блоков регистрации напряженности и индукции каждого магнитопровода. Намагничивающие обмотки соединены с выходами формирователей магнитодвижущей силы ротора, входы которых соединены с блоком задания результирующего тока ротора, генератором скольжения и блоком задания угла поворота. Блоки измерения напряженности и индукции соединены выходами соответственно с блоками нахождения результирующих значений первых гармоник распределения напряженности и индукции, выходы которых подключены к блоку определения угла взаимного сдвига векторов напряженности и индукции. 1 ил.
| Марков Ю.Г | |||
| Исследование и методы расчета синхронного режима гистерезиса реактивного двигателя | |||
| Канд | |||
| дис | |||
| - М.: МЭИ, 1975. |
