31548713
средой, на фиг. 2 - блок-схема уст5
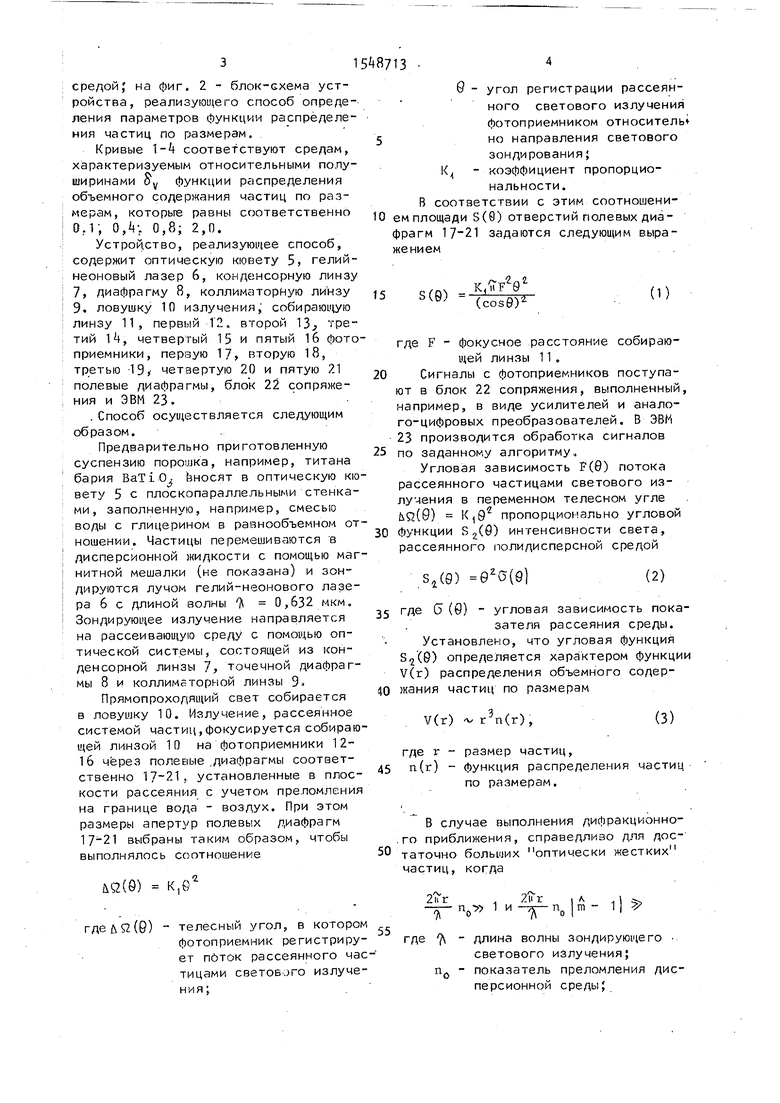
ройства, реализующего способ определения параметров функции распределения частиц по размерам.
Кривые 1-А соответствуют средам, характеризуемым относительными полуширинами 5у функции распределения объемного содержания частиц по размерам, которые равны соответственно 0.1, 0,4: 0,8; 2,П.
Устройство, реализующее способ, содержит оптическую кювету 5, гелий- неоновый лазер 6, конденсорную линзу 7, диафрагму 8, коллиматорную линзу 9. ловушку 10 излучения, собирающую линзу 11, первый 12. второй 137 третий 1, четвертый 15 и пятый 16 фотоприемники, первую 17, вторую 18, третью 19, четвертую 20 и пятую 21 полевые диафрагмы, блок 22 сопряжения и ЭВМ 23.
. Способ осуществляется следующим образом.
Предварительно приготовленную суспензию порошка, например, титана бария BaTiO, вносят в оптическую кювету 5 с плоскопараллельными стенками, заполненную, например, смесью воды с глицерином в равнообъемном отношении. Частицы перемешиваются в дисперсионной жидкости с помощью Mai нитной мешалки (не показана) и зондируются лучом гелий-неонового лазера 6 с длиной волны 0,632 мкм. Зондирующее излучение направляется на рассеивающую среду с помощью оптической системы, состоящей из кон- денсорной линзы 7, точечной диафрагмы 8 и коллим торной линзы 9
Прямопроходящий свет собирается в ловушку 10. Излучение, рассеянное системой частиц,фокусируется собирающей линзой 10 на фотоприемники 12- 16 через полевые диафрагмы соответственно . установленные в плоскости рассеяния с учетом преломления на границе вода - воздух. При этом размеры апертур полевых диафрагм выбраны таким образом, чтобы выполнялось соотношение
ьй(б) к,е2
где и Я. (9) - телесный угол, в котором фотоприемник регистрирует пбток рассеянного частицами cseTosjro излучения ;
4
0 - угол регистрации рассеянного светового излучения Фотоприемником относитель но направления светового
зондирования;
К,, - коэффициент пропорциональности.
В соответствии с этим соотношени- ем площади 5(9) отверстий полевых диафрагм 17-21 задаются следующим выражением
5(0)
(cos9P
(1
где F - фокусное расстояние собирающей линзы 11.
Сигналы с фотоприемников поступают в блок 22 сопряжения, выполненный, например, в виде усилителей и аналого-цифровых преобразователей. В ЭВМ 23 производится обработка сигналов по заданному алгоритму„
Угловая зависимость Р(б) потока рассеянного частицами светового излучения в переменном телесном угле Ьй(9) К,92 пропорционально угловой Функции S2(9) интенсивности света, рассеянного полидисперсной средой
5Л0) 0г(5(9
(2)
где G (0) - угловая зависимость показателя рассеяния среды. Установлено, что угловая функция 52(б) определяется характером функции V(r) распределения объемного содержания частиц по размерам
V(r) -v (r),
(3)
где г - размер частиц, п(г) - функция распределения частии по размерам.
В случае выполнения дифракционного приближения, справедливо для достаточно больших оптически жестких частиц, когда
5
г
где 7
2iTr. 2иг
V 1 и у- По
га- 1)
- длина волны зондирующего
светового излучения; й - показатель преломления дисперсионной среды;
m - относительный комплексный показатель преломления вещества частиц,
угловая зависимостьG(0) может быть
описана соотношением
1548713
Расчетное выражение (5) может быть записано в виде, удобном для вычисления наиболее вероятного модального размера часУиц


Изобретение относится к области контрольно-измерительной техники, в частности к оптическим способам контроля микроструктуры веществ в дисперсном состоянии, и может найти применение для контроля параметров дисперсности сред, например, в химической, пищевой промышленности, медицине, при контроле загрязнения окружающей среды. Целью изобретения является повышение верхнего предела полидисперсности анализируемых частиц и повышение информативности способа за счет дополнительного определения относительной полуширины функции распределения объемного содержания частиц по размерам. Сущность изобретения состоит в том, что среду с исследуемыми частицами зондируют монохроматическим световым пучком. Определяют угловое распределение F(Θ) рассеянного частицами света в переменном телесном угле Δ Ω (Θ) ъ Θ2, где Θ - угол регистрации рассеянного света. Далее находят угловое положение первого максимума F(ΘM), определяют поток рассеянного света под углом Θ = 2ΘM и находят δ F = F(ΘM)/F(2ΘM). Величины наиболее вероятного модального радиуса RV частиц и относительной полуширину δV функции распределения объемного распределения частиц по размерам определяют из расчетных соотношений с использованием этих величин. 2 ил.
G(9) (
II, (k r9) , ,, г n(r)dr,
У
21Г
где k - -п0 , 11 (k r0) - функция Бесселя первого порядка.
Для достаточно узких функций распределения частиц по размерам величина 8(0) будет иметь осциллирующий характер с убывающей пропорционально 9 амплитудой колебаний. При уширении спектра распределения V(r) осцилляции функции 8(8) исчезают, остается только первый основной максимум, положение которого практически не изменяется (фиг. 1).
Угловое положение 9№ этого максимума может быть найдено из анализа выражений (2) на экстремум. Оно определяется из соотношения
krv 9m
1,845.
где г.
v - наиболее вероятный модальный
размер частиц.
Как видно из хода кривых на фиг.1, максимально чувствительной характеристикой к степени полидисперсности светорассеивающих частиц является относительное изменение функции S.(0) при переходе ее значений от первого локального максимума к первому локальному минимуму, что примеоно соответствует удвоению угла рассеяния.
от бм
где 0 у - полуширина функции распределения объемного содержания частиц по размерам, хорошо аппроксимируются нормальной Функцией Гаусса вида
lg&F(lgSv) 1,7exp -0,78(lgSv+ + 1,)}(6)
в области lg uy - 1,4, откуда следует расчетное соотношение, позволяющее вычислить полуширину 5V функции распределения объемного содержания частиц по размерам
Зависимости $ F ife)
b4./.Vm)
о,
lgSv clg
ll d
Ig&F
+ f
(4)
lgrv -alp
+ b
(8)
tO где a, b, с, d и f калибровочныекоэффициенты.
Формула
зобретения
15
20
25
30
35
Способ определения параметров функции распределения частиц по размерам, включающий зондирование среды с исследуемыми частицами пучком монохроматического светового излучения, измерение угловых характеристик рассеянного частицами светового излучения и определение из этих угловых характеристик наиболее вероятного модального размера частиц, отличаю щийся тем, что, с целью повышения верхнего предела полидисперсности анализируемых частиц и повышения информативности способа за счет дополнительного определения относительной полуширины распределения объемного содержания частиц по размерам, в качестве угловых характеристик рассеянного частицами светового излучения используют угловую зависимость F(Q) потока рассеянного частицами светового излучения в переменном телесном угле
iQ(Q)
-к,б
0 40 гДе К, - коэффициент пропорциональности;
угол регистрации рассеянного светового излучения относительно направления светового 45 зондирования,
находят величину первого максимума F(8m) этой угловой зависимости, соответствующего минимальному углу вт регистрации рассеянного светового 50 излучения, определяют величину
F(29rn) рассеянного светового излуче- ния, соответствующего углу регистрации, равному 29,у,. находят отношение &F F(9m)/F(29m) , при этом значение « наиболее вероятного модального радиуса гv частиц и относительной полуширины ov функции распределения объемного содержания частиц по размерам определяют из соотношений
18Г, . -al8 ««sb t „
где
Ig&y Clg
til d
IgfrF
+ f,
J.
Фиг. 2
8
длина волны зондирующего светового излучения; показатель преломления дисперсионной среды;
- калибровочные коэффициенты.
| Способ определения микроструктуры атмосферных дымок | 1978 |
|
SU711835A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ван де Хюлст Г | |||
| Рассеяние света малыми частицами | |||
| М.: Иностр | |||
| литература, 1961, с | |||
| Реверсивный дисковый культиватор для тросовой тяги | 1923 |
|
SU130A1 |
