Изобретение относится к сельскому хозяйству и может быть использовано для автоматизации контроля и управления водо- распределением и поливом на мелиоративных системах.
Цель изобретения - повышение надежности и оперативности контроля и расширение функциональных возможностей системы.
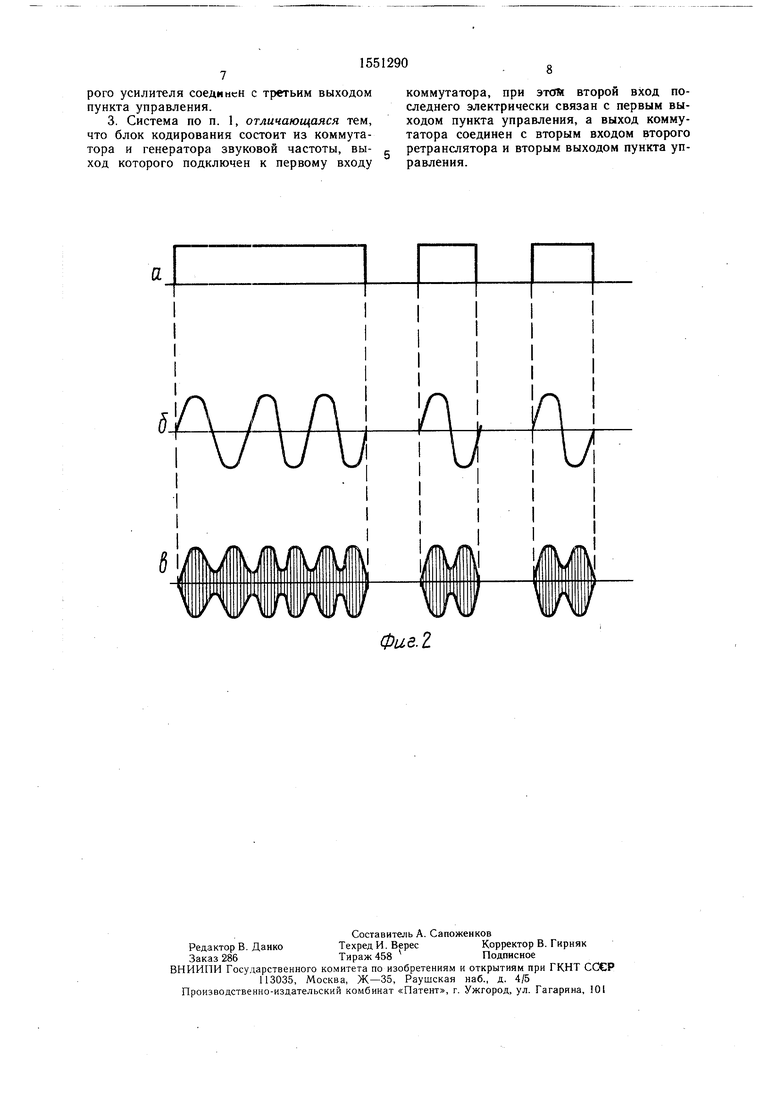
На фиг. 1 представлен фрагмент автоматизированной оросительной системы; на фиг. 2 - временные диаграммы работы пункта управления а - сигнал на выходе кодера пункта управления, б - сигнал на выходе коммутатора блока кодирования, в - сигнал на выходе приемопередающего устройства
Автоматизированная оросительная система содержит водоводы 1, зодовыпуски 2, пункты 3 управления, гидроакустические приемопередатчики 4, первый 5 и второй 6 ретрансляторы и блок 7 кодирования. Пункт 3 управления состоит из блока 8 управления, кодера 9, декодера 10, исполнительного устройства 11 и блока 12 телесигнализации и телеизмерения.
Гидроакустический приемопередатчик 4 включает в себя гидроакустический преобразователь 13 и приемопередающее устройство 14. Первый 5 и второй 6 ретрансляторы содержат акустический преобразователь 15, первый 16 усилитель и второй 17 усилители, модулятор 18 и демодулятор 19. В блок 7 кодирования входят генератор 20 звуковой частоты и коммутатор 21.
Вход и выход первого ретранслятора 5 соединены соответственно с выходом и входом гидроакустического приемопередатчика 4, расположенного в нижнем бьефе водовы- пуска 2
Первый вход и первый выход второго ретранслятора 6 соединены соответственно с выходом и входом второго гидроакустического приемопередатчика 4, расположенного в верхнем бьефе водовыпуска 2.
Второй вход второго ретранслятора 6 связан с выходом блока 7 кодирования, вход которого соединен с первым выходом пункта 3 управления. Второй и третий выходы пункта 3 управления соединены соответственно с вторым и третьим входами второго ретранслятора 6, второй выход которого подключен, к входу пункта 3 управления. Акустические преобразователи 15 ретрансляторов 5 и 6 соединены соответственно с входами первых и выходами вторых усилителей 16 и 17.
В первом ретрансляторе 5 выход первого усилителя 16 связан с входом модулятора 18, выход которого соединен с входом гидроакустического приемопередатчика 4.
Второй усилитель 17 своим входом подключен к выходу демодулятора 19, вход которого связан с выходом гидроакустического приемопередатчика 4.
Во втором ретрансляторе 6 выход первого усилителя 16 подключен к выходу демодулятора 19 и входу пункта 3 управления. Демодулятор 19 своим входом связан с выходом гидроакустического приемопередатчика 4.
Вход модулятора 18 соединен с выходом
блока 7 кодирования и вторым выходом пункта 3 управления. Своим выходом модулятор 18 связан с входом гидроакустического приемопередатчика 4.
Вход второго усилителя соединен с треть0 им выходом пункта 3 управления.
В блоке 7 кодирования выххад генератора 20 подключен к первому входу ком- .мутатора, второй вход которого электрически связан с первым выходом пункта 3 управления.
Автоматизированная система работает следующим образом.
С одного из пунктов управления, являющегося диспетчерским пунктом, осуществляется контроль за протеканием процесса
0 водораспределения в соответствии с заданным регламентом и управление водовы- пусками, а также контроль за работой оборудования на системе. При отсутствии сигналов сообщений гидроакустические приемопередатчики 4 и ретрансляторы 5 и 6 всех
5 пунктов 3 управления (контролируемых пунктов) находятся в режиме приема. Для вызова какого-либо пункта управления, являющегося контролируемым пунктом, и передачи команды с блока 8 управления на кодер
„ 9 поступает вызывной сигнал, соответствующий номеру требуемого контролируемого пункта и соответствующей команде, который преобразуется кодером 9 в последовательность импульсов, управляющих коммутатором 21 блока 7 кодирования (фиг. 2а).
При включенном генераторе 20 звуковой частоты на выходе коммутатора 21 будет сформирована кодовая посылка с частотой генератора 20 (фиг. 26), которая через модулятор 18 возбудит передатчик приемопередающего устройства 14, работающего на ульт0 развуковой частоте (15-40 кГц). Электрический дважды промодулированный сигнал с выхода приемопередающего устройства 14 (фиг. 2е) подается на гидроакустический преобразователь 13 и в виде акустических колебаний передается по воде водовода 1 5 в направлении пункта 3 управления (контролируемого пункта), расположенного в том же бьефе (верхнем на фиг. 1), что и гидроакустический преобразователь 13 (приемопередатчик 4).
Если вызываемый контролируемый пункт располагается с другой стороны водовыпуска 2, управляемого с диспетчерского пункта, кодовая посылка с коммутатора 21 блока 7 кодирования через блок 8 управления будет 5 подана на второй усилитель 17 второго ретранслятора 6. После усиления им и преобразования в акустические колебания с помощью громкоговорителя (акустического преобразователя 15) вызывной сигнал в виде
звуковой посылки будет передан в направлении акустического преобразователя 15 (громкоговорителя в режиме микрофона) первого ретранслятора 5. После преобразования звукового сигнала в электрический и усиле- ния первым усилителем 16 через модулятор 18 будет возбужден гидроакустический приемопередатчик 4 в другом бьефе (нижнем на фиг. 1) и вызывной сигнал в виде гидроакустических колебаний будет передан в направлении нижнего бьефа.
При поступлении гидроакустического сигнала на гидроакустический преобразователь 13 он будет преобразован им в электрический и после усиления приемником приемопередающего устройства 4 поступит на демодулятор 19 ретранслятора. Если это первый ретранслятор 5, то после демодуляции и усиления усилителем 17 сигнал в виде кодовой посылки (фиг. 26) поступит на громкоговоритель 15 и будет излучен им в направлении второго ретранслятора 6 в ви- де звуковой посылки. Принятый и преобразованный с помощью акустического преобразователя 15 второго ретранслятора в электрический сигнал сигнал вызова после усиления первым усилителем 16 поступит на де- кодер 10 и далее на блок управления.
Если код вызова совпал с кодом данного пункта 3 управления, выполняется та команда, которая была передана (например, телеуправление). В противном случае кодовая посылка с выхода блока 8 управления поступает на модулятор 18, возбуждает передатчик приемопередающего устройства 4 и с помощью гидроакустического преобразователя 13 в виде гидроакустических колебаний передается в направлении следующего контролируемого пункта. Если принятый и усиленный вызывной сигнал поступил с выхода гидроакустического преобразователя на второй ретранслятор 6, он после демодуляции демодулятором 19 второго ретранслятора 6 также поступит на декодер 10 и далее в блок 8 управления.
Если пришла команда на проведение телеизмерения или опрос телесигнализации, работа системы осуществляется следующим образом. На вызванном контролируемом пункте блок 8 управления включает соот- ветствующие датчики блока 12 телесигнализации и телеизмерения. Сигналы с них через блок 8 управления поступают на кодер 9 и после преобразований, аналогичных тем, что происходили на диспетчерском пункте управления при формировании вызывного сигнала, передаются в направлении диспетчерского пункта.
При включении датчиков аварийной телесигнализации передача сигналов инициируется самим пунктом 3 управления, а именно блоком 8 управления, который формирует кодовую посылку с номером данного контролируемого пункта, которая передается с интервалом в 5-10 мин. Параметры сиг
налов кода выбираются таким обра SON. ч ч бы без особого труда можно было идентифицировать сигнал при его прослушивани: во время ретрансляции на пунктлх ления (контролируемых пунктах; riant-i- мер, один короткий сигнал означает -ч , сиг нал длительностью в 3-5 рез больше -- «5, самый длинный (в 8-10 раз больше короткого сигнала) - «10. Таким образом, номер контролируемого пункта (17) будет передан одним длинным, одним средним и двумя короткими сигналами. Выбором частоты заполнения импульсов можно также передавать дополнительную информацию,например вид телесигнализации.
0 5
0 5
5 0
5
0
Формула изобретения
1.Автоматизированная оросительная система, содержащая водоводы с управляемыми водовыпусками, связанными с пунктами управления, которые оснащены гидроакустическими приемопередатчиками, соединенными линией связи, отличающаяся тем, что, с целью повышения надежности и оперативности контроля и расширения функциональных возможностей системы, она снабжена первым и вторым ретрансляторами, акустически связанными между собой, и блоком кодирования, при этом вход и выход первого ретранслятора соединены соответственно с выходом и входом гидроакустического приемопередатчика в нижнем бьефе водовы- пуска, а первый вход и первый выход второго ретранслятора связаны соответственно с выходом и входом гидроакустического приемопередатчика в верхнем бьефе водовыпус- ка, причем второй вход второго ретранслятора подключен к выходу блока кодирования, вход которого соединен с первым выходом пункта управления, а второй и третий выходы последнего соединены соответственно с вторым и третьим входами второго ретранслятора, второй выход которого подключен к входу пункта управления.
2.Система по п. 1, отличающаяся тем, что каждый из ретрансляторов состоит из акустического преобразователя, первого и второго усилителей, модулятора и демодулятора, а акустический преобразователь соединен с входом первого усилителя и выходом второго усилителя, при этом вход и выход гидроакустического приемопередатчика связаны соответственно с выходом модулятора и входом демодулятора, причем в первом ретрансляторе выход первого усилителя соединен с входом модулятора, а выход демодулятора связан с входом второго усилителя, при этом во втором ретрансляторе выход первого усилителя подключен к выходу демодулятора и к входу пункта управления, а вход модулятора соединен с выходом блока кодирования и вторым выходом пункта управления, кроме того, вход второго усилителя соединен с третьим выходом пункта управления.
3. Система по п. 1, отличающаяся тем, что блок кодирования состоит из коммутатора и генератора звуковой частоты, вы- ход которого подключен к первому входу
коммутатора, при этол второй вход последнего электрически связан с первым выходом пункта управления, а выход коммутатора соединен с вторым входом второго ретранслятора и вторым выходом пункта управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПУТНИКОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2297716C2 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОЙ ТЕЛЕФОННОЙ СВЯЗИ ВОДОЛАЗОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2738385C2 |
| Способ гидроакустической телефонной связи водолазов и устройство для его осуществления (варианты) | 2017 |
|
RU2658477C1 |
| СПУТНИКОВАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2332794C2 |
| Устройство для сбора и передачииНфОРМАции | 1977 |
|
SU678974A1 |
| ПОДВОДНЫЙ БЕСПРОВОДНОЙ АКУСТИЧЕСКИЙ ПРИЕМОПЕРЕДАТЧИК | 2023 |
|
RU2826224C1 |
| Устройство телемеханики контролируемого пункта | 1986 |
|
SU1536421A1 |
| СИСТЕМА ПОДВОДНОЙ КАБЕЛЬНОЙ ГЛУБОКОВОДНОЙ СВЯЗИ С ПОДВОДНЫМИ ЛОДКАМИ | 2016 |
|
RU2620253C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ИНКАССАТОРСКИМИ МАШИНАМИ | 2011 |
|
RU2463665C1 |
| ОДНОЧАСТОТНАЯ СИСТЕМА РАДИОСВЯЗИ С РЕТРАНСЛЯТОРОМ | 2010 |
|
RU2440676C1 |
Изобретение относится к сельскому хозяйству и может быть использовано для автоматизации контроля и управления водораспределением и поливом на мелиоративных системах. Цель изобретения - повышение надежности и оперативности контроля и расширение функциональных возможностей. Автоматизированная оросительная система содержит водоводы 1, водовыпуски 2, пункты 3 управления, гидроакустические приемопередатчики 4, первый ретранслятор 5, второй ретранслятор 6 и блок 7 кодирования. Пункт 3 управления состоит из блока 8 управления, кодера 9, декодера 10, исполнительного устройства 11, блока 12 телесигнализации и телеизмерения. Гидроакустический приемопередатчик 4 имеет гидроакустический преобразователь 13 и приемопередающее устройство 14. При проведении телеизмерения сигналы с датчиков блока телесигнализации и телеизмерения 12 поступает на кодер 9 и после преобразований, аналогичных тем, что происходит на диспетчерском пункте управления при формировании вызывного сигнала, передаются в направлении вызывного сигнала диспетчерского пункта. 2 з.п.ф-лы, 2 ил.
S.
Фие.2
| Автоматизированная открытая оросительная система | 1983 |
|
SU1144663A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
