Изобретение относится к области радиоэлектроники, а именно к технике проводной связи, и может быть использовано для организации связи с глубокопогруженными подводными объектами.
Известна Система связи с глубокопогруженными подводными лодками. Патент РФ №2295832 20.03.2007 г. Система состоит из береговой приемопередающей аппаратуры оптического диапазона, соединенной с оптическим канализатором, проложенным по дну водоема. Для выхода на связь с береговым оконечным пунктом ПЛ подходит к входному оптическому окну канализатора, чтобы оказаться в зоне действия оптического канала связи и, не всплывая, передает информацию с помощью своей приемопередающей аппаратуры. Недостатком данной системы является то, что система обеспечивает работу только на небольшой территории, вблизи от берега на стационарно оборудованных пунктах.
Прототипом заявляемой системы является Система подводной кабельной глубоководной связи с подводными лодками. Патент РФ №2260249 от 10.09.2005 г. Система подводной кабельной глубоководной связи с подводным лодками содержит береговые пункты с установленными приемопередающими станциями оптического диапазона, которые соединены подводным оптическим кабелем с ретрансляторами. Дополнительно с ретрансляторами установлены плавающие на глубине подводные гидроакустические станции для выхода на связь с береговым оконечным пунктом подводной лодки, которая подходит к плавающей ГАС на радиус действия гидроакустической аппаратуры и, не всплывая, передает информацию через свою гидроакустическую станцию.
Недостатком прототипа является то, что он имеет узкую полосу пропускания, низкую скорость передачи и малый объем передаваемой информации.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют в известных источниках информации, что указывает на соответствие заявленного устройства условию патентоспособности «новизна».
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного объекта, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность разделения во времени лучевой структуры акустического поля с последующим энергетическим суммированием всех пришедших в точку приема лучей, предусматриваемых существенными признаками заявленного изобретения на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень»
Целью изобретения является повышение помехоустойчивости связи, увеличение скорости и объема передаваемой информации.
Поставленная цель достигается тем, что система подводной кабельной глубоководной связи с подводным лодками содержит береговые пункты с установленными приемопередающими станциями оптического диапазона, которые соединены подводным оптическим кабелем с ретрансляторами, дополнительно с ретрансляторами установлены плавающие на глубине подводные гидроакустические станции для выхода на связь с береговым оконечным пунктом подводной лодки, которая подходит к плавающей ГАС на радиус действия гидроакустической аппаратуры и, не всплывая, передает информацию через свою гидроакустическую станцию, при этом в систему передачи информации включен кодер-передатчик режима излучения, кодер-передатчик обращения и приемник-декодер, причем кодер-передатчик режима излучения состоит из двух генераторов квазиортогональных М-последовательностй и мультиплексора, выход одного из двух генераторов коммутируется на вход модулятора, результирующий бинарный сигнал модулируется и передается в канал связи, кодер-передатчик обращения времени осуществляет прием излученных последовательностей, обращение принятого сигнала во времени и переизлучение обращенного сигнала, он состоит из блока обращения времени, соединенного с блоком кодирования, а приемник-кодер обеспечивает сравнение уровней корреляции по каналам за интервалы времени, равные длительности последовательности, при превышении одного уровня над другим в течение этого интервала времени принимается решение о переданной последовательности и на выходе устанавливается соответствующий логический уровень, он состоит из двух идентичных каналов корреляционной обработки квазиортогональных М-последовательностей одинаковой длины и содержит корреляторы «0» и «1», соединенные с каналом связи и блоками усреднения, которые в свою очередь соединены с компаратором через детекторы максимума и пиковыми детекторами, причем пиковые детекторы соединены с пороговым умножителями, которые соединены с детекторами максимума.
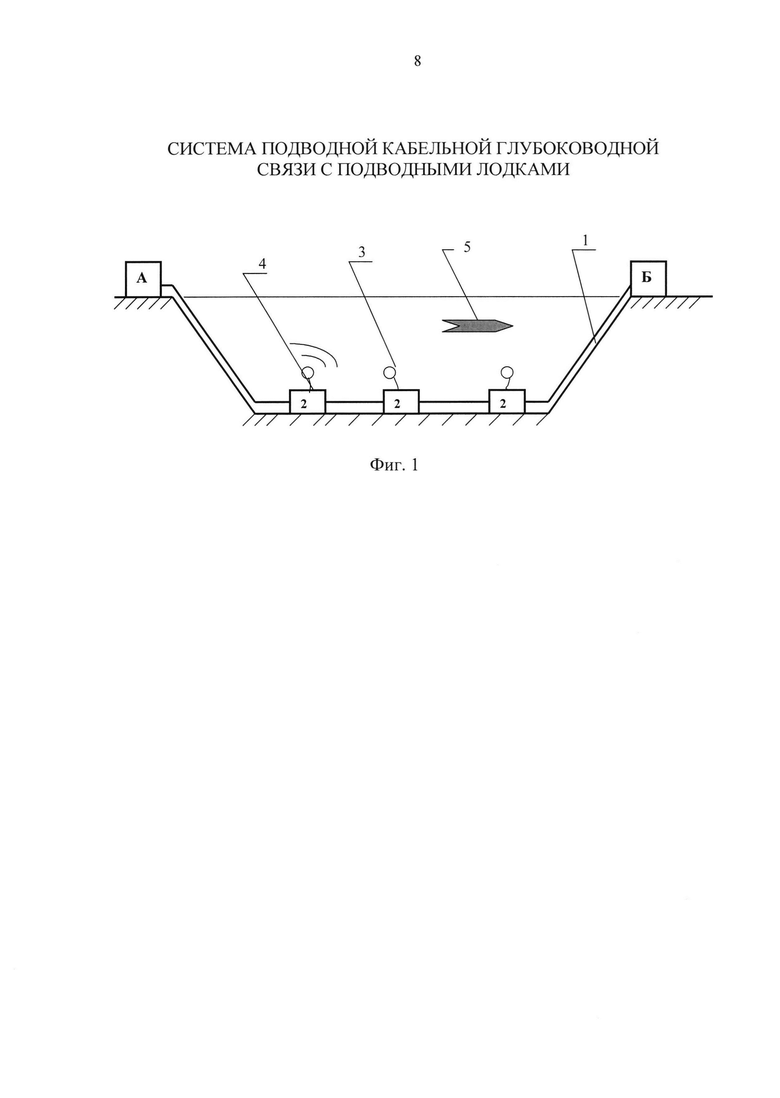
На Фиг. 1. показана блок схема системы, где:
1 - подводный оптический кабель; 2 - подводные оптические ретрансляторы; 3 - подводные гидроакустические станции; 4 - соединительные кабели; 5 - подводная лодка.
На Фиг. 2. показана блок-схема прохождения информационных сигналов от ПЛ на приемопередающие станции, установленные на береговых оконечных пунктах А и Б, и обратно, где:
6 - генератор М - последовательности «0»;
7 - генератор М - последовательности «1»;
8 - коммутационное устройство;
9 - модулятор;
10 - блок обращение времени;
11 - блок кодирования;
12 - блок усреднение;
13 - коррелятор канала «0»;
14 - пиковый детектор;
15 - пороговый умножитель;
16 - детектор максимума;
17 - компаратор.
Система работает следующим образом. Информационные сигналы, сформированные на приемопередающих станциях А и Б по линии, состоящей из подводного оптического кабеля 1 и ПОР 2, передаются в направлении противоположного берегового оконечного пункта, на приемопередающих станциях производятся взаимные преобразования. В состав береговых оконечных пунктов входят приемопередающие станции, аппаратура электропитания оконечных пунктов, телеконтроля, телемеханики, служебной связи и дистанционного питания подводных усилителей.
Для выхода на связь с береговым оконечным пунктом ПЛ 5 подходит к подводной ГАС 3 так, чтобы попасть в радиус действия гидроакустической аппаратуры и, не всплывая, передает информацию, например, с помощью телетайпа и своей ГАС 3. Гидроакустическая антенна 3а подводной ГАС 3 (не показана) принимает этот информационный сигнал, который по соединительному кабелю 4 проходит на кодер-передатчик подводной лодки 5, который состоит из генераторов квазиортогональных М-последовательностей и мультиплексора. В зависимости от заданного режима излучения выход одного из двух генераторов коммутируется коммутатором 8 на вход модулятора 9. Результирующий бинарный сигнал модулируется и передается в канал связи. Биты информационной посылки поступают через интервалы, равные времени генерации последовательности. Собственно генераторы представляют собой микропрограммную реализацию линейных регистров сдвига с заданными обратными связями. В рассматриваемом варианте системы передачи информации на ПЛ 5 были реализованы программы генерации двух 255-символьных М-последовательностей для передачи битов «0» и «1».
Приемник-декодер состоит из двух идентичных каналов корреляционной обработки квазиортогональных М-последовательностей одинаковой длины. Алгоритм демодуляции сводится к сравнению уровней корреляции по каналам за интервалы времени, равные длительности последовательности. При превышении одного уровня над другим в течение этого интервала времени принимается решение о переданной последовательности и на выходе устанавливается соответствующий логический уровень.
Основной проблемой реализации данного алгоритма обработки сигнала является определение принятой последовательности по наличию корреляционного пика. Эта проблема связана с заранее неизвестными уровнями максимума и боковых выбросов корреляционной функции, известно лишь максимально возможное отношение уровней, определяемое числом L символов в последовательности. Для применяемой в алгоритме апериодической функции корреляции эта величина порядка  . Влияние мультипликативных и аддитивных помех на распространение сигналов в гидроакустическом канале приводит к искажению структуры сигнала и к уменьшению уровня основного пика корреляционной функции по отношению к боковым выбросам на неопределенную величину, что усложняет идентификацию основного пика. Поэтому для решения данной проблемы используем метод взаимного сравнения уровней корреляций в ортогональных каналах. Пара последовательностей в каналах подбирается с таким условием, чтобы функция взаимной корреляции между ними не превышала величину
. Влияние мультипликативных и аддитивных помех на распространение сигналов в гидроакустическом канале приводит к искажению структуры сигнала и к уменьшению уровня основного пика корреляционной функции по отношению к боковым выбросам на неопределенную величину, что усложняет идентификацию основного пика. Поэтому для решения данной проблемы используем метод взаимного сравнения уровней корреляций в ортогональных каналах. Пара последовательностей в каналах подбирается с таким условием, чтобы функция взаимной корреляции между ними не превышала величину  .
.
Числовое значение порога для каждого канала, выше которого принимается решение о наличии корреляционного пика, определяется как удвоенное значение уровня корреляции в соответствующем ему ортогональном канале. Все значения, меньше порога, обнуляются. Таким образом, осуществляется фильтрация корреляционных максимумов от боковых выбросов для последующего сравнения между каналами.
Передача М-последовательностей друг за другом приводит к появлению основных пиков в каналах в различные моменты времени. То есть при появлении корреляционного максимума в одном из каналов в другом будут регистрироваться боковые выбросы. Это дает возможность непосредственного сравнения уровней в каждый момент времени с помощью компаратора в постоянно изменяющихся условиях приема.
Важным элементом схемы приемника-декодера являются блоки усреднения и пиковые детекторы. Алгоритм усреднения функционирует, последовательно осуществляя вычисление абсолютных значений корреляционной функции, пиковое детектирование по длине символа М-последовательности и свертку с треугольными временными окнами (окном Бартлета):  , n=0,1,2,…N-1,
, n=0,1,2,…N-1,
где a=(N-1)/2, N - число отсчетов, в нашем случае равное 9.
Собственно окно Бартлета схемотехнически реализовано в виде двух прямоугольных окон (окно Дирихле) на базе двух 4-разрядных регистров сдвига. Еще одни, основные, пиковые детекторы (детекторы максимумов), показанные на блок-схеме, работают по всей длине последовательности.
Для обеспечения более высокой достоверности передачи информации на подводной лодке 5 в состав системы включен кодер-передатчик обращения времени. Это особенно важно в условиях многолучевости, характерной для мелкого моря, горизонтальной рефракции - при размещении корреспондирующих точек вблизи береговой черты, мультипликативных помех как результата влияния морских течений и движения подводных лодок. Кодер-передатчик обращения времени осуществляет прием излученных последовательностей, обращение принятого сигнала во времени и переизлучение обращенного сигнала. Этот элемент системы может быть как в составе одного или двух осуществляющих связь ПЛ, так и в виде отдельного ретранслятора, принимающего сигнал и переизлучающего его после обращения.
Рассмотрим более подробно работу кодера-передатчика обращения времени. Пробный источник излучает сигнал s(t). Сигнал ri(t), прошедший через морскую среду с импульсной характеристикой hi(t), принимается i-м элементом вертикальной приемоизлучающей антенны. Элементами этой антенны сигнал переизлучается путем обращения во времени и принимается в точке расположения пробного источника пассивной вертикальной антенной, которая регистрирует сигнал s*(t). Последовательность этапов классического обращения представляется с помощью оператора свертки (*) следующим образом: s(t); ri (t)=s(t)*hi(t); ri(-t);
 .
.
Фактор g(t)=h(-t)*h(t), характеризующий основную идею метода обращения времени, далее будем называть g(t)- функцией. Из предположения, что импульсная характеристика как парциальная hi(t), так и в целом h(t) (функция отклика канала) не меняется в течение сеанса связи, следует наличие в g(t)-функции одного максимума, равного сумме квадратов всех приходов акустической энергии в точку размещения пробного источника. В основе этого предположения лежит представление о функции временной когерентности:
 ,
,
где R0 и Rn - результат свертки опорного зондирующего сигнала с принятыми в нулевой и n-й момент времени сигналами соответственно; σ0 и σn - стандартные отклонения R0 и Rn соответственно; Т - время усреднения, равное длительности сигнала в точке приема. Далее находим максимальные значения огибающей функции ψ(τ) для последовательных моментов приходов сигналов.
Если интервал стабильности отклика канала определить как время, за которое пиковое значение функции временной когерентности уменьшается в е раз, то стабильность канала при распространении сложных фазоманипулированных сигналов в шельфовой зоне и из шельфа в глубокое море лежит в пределах 10-180 минут. [Акуличев В.А. и др. Применение сложных акустических сигналов в системах связи и управления подводными объектами // Доклады АН. 2009. Т. 426, №6. С. 821-823]. Приведенные величины стабильности канала существенно зависят от длины стационарной трассы, несущей частоты, но вполне достаточны для обеспечения функционирования систем, предполагающих, что функция отклика канала не меняется в течение сеанса связи.
Классическая схема обращения времени модифицируется следующим образом. Излучение сигнала s(t). Прием сигнала r(t)=s(t)*h(t). Обращение во времени r(-t)=s(-t)*h(-t). Прием сигнала s*(t)=r(-t)*h(t)=s(-t)*h(-t)*h(t)=s(-t)*g(t).
Таким образом, принцип работы заявляемой системы связи основан на разделении во времени лучевой структуры акустического поля с последующим энергетическим суммированием всех пришедших в точку приема лучей. Технические средства обеспечивают генерацию, излучение, прием и обработку широкополосных псевдослучайных гидроакустических сигналов в диапазоне частот 250-12000 Гц. Эффективность функционирования предлагаемой системы обеспечивается схемой двухканальной корреляционной обработки сложных фазоманипулированных сигналов и специальным кодером обращения времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОДВОДНОЙ КАБЕЛЬНОЙ ГЛУБОКОВОДНОЙ СВЯЗИ С ПОДВОДНЫМИ ЛОДКАМИ | 2003 |
|
RU2260249C2 |
| Система подводной кабельной глубоководной связи с подводными объектами | 2019 |
|
RU2742043C1 |
| СИСТЕМА СВЯЗИ С ГЛУБОКОПОГРУЖЕННЫМИ ПОДВОДНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2295832C1 |
| ПОДВОДНАЯ КАБЕЛЬНАЯ ЦИФРОВАЯ ВОЛОКОННО-ОПТИЧЕСКАЯ СИСТЕМА СВЯЗИ | 2010 |
|
RU2445733C2 |
| СПОСОБ СВЯЗИ С ПОДВОДНЫМИ ОБЪЕКТАМИ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2772238C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| СИСТЕМА ДЛЯ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538440C2 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |

Изобретение относится к области радиоэлектроники, а именно к технике проводной связи, и может быть использовано для организации связи с глубокопогруженными подводными объектами. Техническим результатом является повышение помехоустойчивости, увеличение скорости и объема передаваемой информации по гидроакустическим каналам связи. Для этого
принцип работы системы подводной кабельной гидроакустической связи с ПЛ основан на разделении во времени лучевой структуры акустического поля с последующим энергетическим суммированием всех пришедших в точку приема лучей. 2 ил.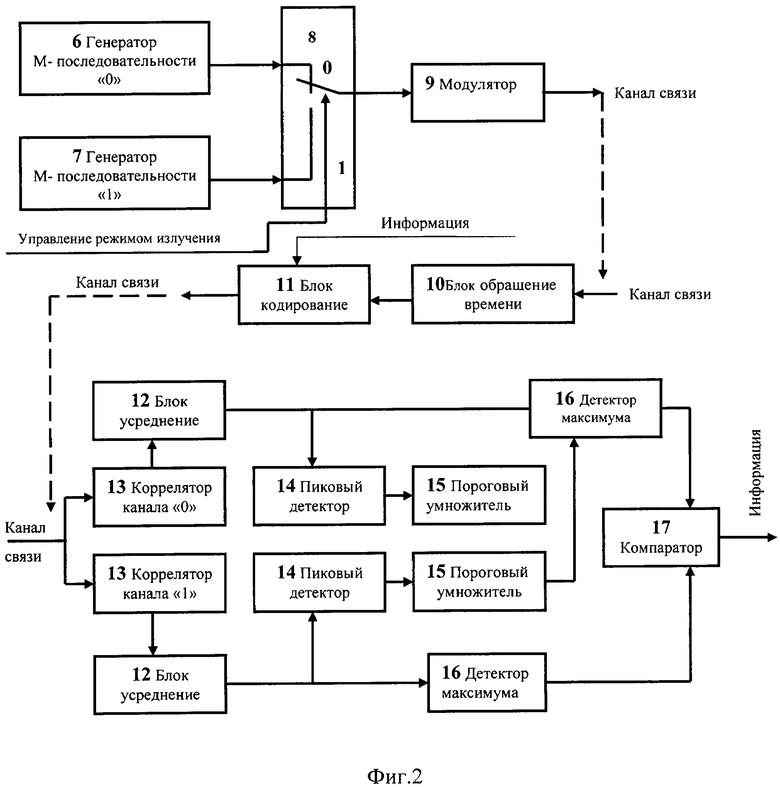
Система подводной кабельной глубоководной связи с подводным лодками, содержащая береговые пункты с установленными приемопередающими станциями оптического диапазона, которые соединены подводным оптическим кабелем с ретрансляторами, при этом дополнительно с ретрансляторами установлены плавающие на глубине подводные гидроакустические станции для выхода на связь с береговым оконечным пунктом подводной лодки, которая подходит к плавающей ГАС на радиус действия гидроакустической аппаратуры и, не всплывая, передает информацию через свою гидроакустическую станцию, отличающаяся тем, что в систему включен кодер-передатчик режима излучения, блок обращения времени и приемник-декодер, причем кодер-передатчик режима излучения состоит из двух генераторов квазиортогональных М-последовательностй и мультиплексора, выход одного из двух генераторов коммутируется на вход модулятора, результирующий бинарный сигнал модулируется и передается в канал связи, блок обращения времени осуществляет прием излученных последовательностей, обращение принятого сигнала во времени и переизлучение обращенного сигнала, он соединен с блоком кодирования, а приемник-кодер обеспечивает сравнение уровней корреляции по каналам за интервалы времени, равные длительности последовательности, при превышении одного уровня над другим в течение этого интервала времени принимается решение о переданной последовательности и на выходе устанавливается соответствующий логический уровень, он состоит из двух идентичных каналов корреляционной обработки квазиортогональных М-последовательностей одинаковой длины и содержит корреляторы «0» и «1», соединенные с каналом связи и блоками усреднения, которые в свою очередь соединены с компаратором через детекторы максимума и пиковыми детекторами, причем пиковые детекторы соединены с пороговыми умножителями, которые соединены с детекторами максимума.
| СИСТЕМА СВЯЗИ С ГЛУБОКОПОГРУЖЕННЫМИ ПОДВОДНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2295832C1 |
| СИСТЕМА ПОДВОДНОЙ КАБЕЛЬНОЙ ГЛУБОКОВОДНОЙ СВЯЗИ С ПОДВОДНЫМИ ЛОДКАМИ | 2003 |
|
RU2260249C2 |
| СПОСОБ ДВУСТОРОННЕЙ СВЯЗИ С ПОДВОДНЫМ ОБЪЕКТОМ | 1998 |
|
RU2134023C1 |
| КОНЦЕНТРАТ РАСТИТЕЛЬНЫЙ "РАЗУМНЫЙ-2" | 2004 |
|
RU2279836C2 |

