(21)4256
(22)23.04.87
(46) 23,03.90. Бюл. Г 11
(71)Московски ; автомобильно- дорожный институт
(72)8.11 .Дмитриев, Н. А. Кулешова и М.А.Куманцев
(53)620.165.29 (088,8)
(56)Абрамов И.А. н др, и .змы тневмоав i оматпкп. - 1ч.: Высшая и -ола, 1984, рис,5,23
(54)СТРУЙНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЯ ,
(57)Изобретение относится к опрете линию перемещения тел и почволяе повысить точность путем обеспечения линейной зависимости обратной связи во всем диапазоне измерения. Датчик содерчап корпус 1 , соосно установленные питающее 13 и 5 сопла. Последнее закреплено на плоской пружине 6 и имеет две пластины 7, установленные жестко снаружи сопла 5 под углом к его продольной оси с раскрытием угла к отверстию сопла 5, Пружина 6 имеет продольный паз 12, в котором установлен элемент крепления сопла 5 к корпусу 1. При перемещении штока 2 сопло 13 приближается к соплу 5. При этом на пластинах 7 возникает подъемная сила, пружина 6 изгибается, сопло 5 выходит в зону меньших скоростей струи. Одновременно несколько уменьшается его мидель. Значение выходного давления снижается. Сравнивая входное и выходное давления, определяют перемещение штока 2 и контролируемого тела. 1 з.п. ф-лы, 2 ил.
§
V)
с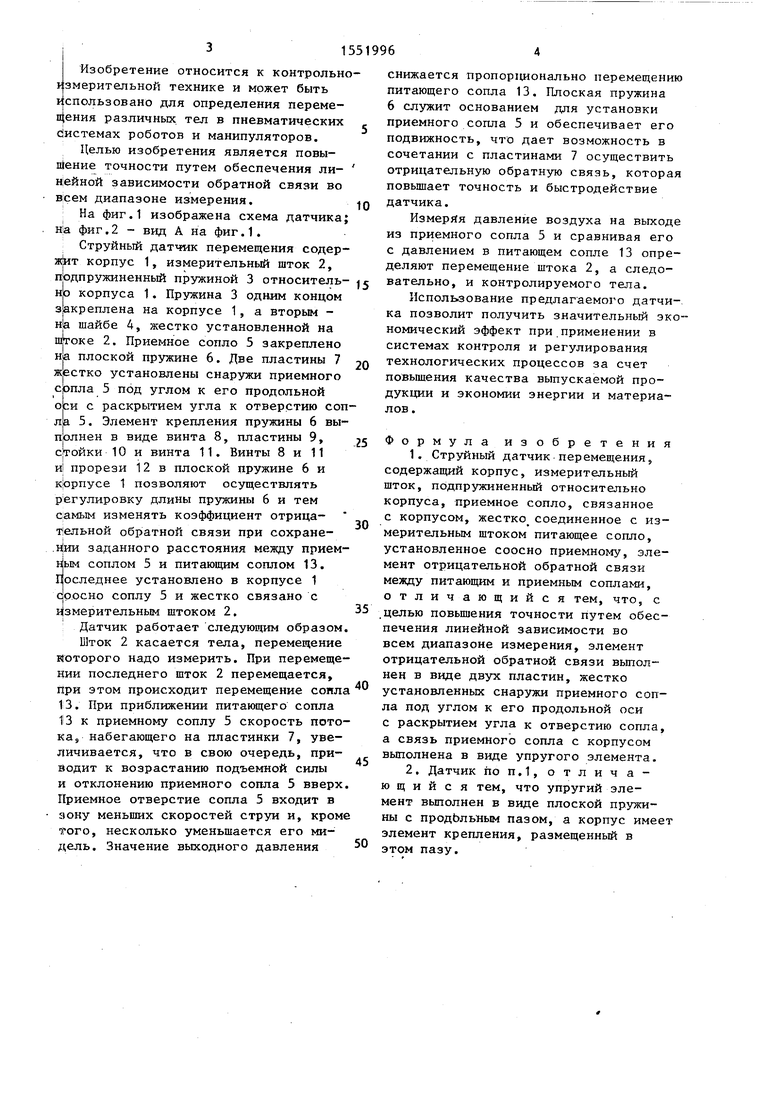
| название | год | авторы | номер документа |
|---|---|---|---|
| Струйный усилитель | 1990 |
|
SU1701997A1 |
| Пневматический струйный датчик перемещения | 1987 |
|
SU1439393A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД ДЛЯ ЗАПОРНО-РЕГУЛИРУЮЩЕЙ АРМАТУРЫ, ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО, СТРУЙНЫЙ ДВИГАТЕЛЬ, УСТРОЙСТВО ОБРАТНОЙ СВЯЗИ, БЛОК ПЕРЕКЛЮЧАТЕЛЕЙ | 2005 |
|
RU2288376C1 |
| Устройство для автоматического регулирования уровня коллодия в фильере отливочной машины | 1980 |
|
SU970328A2 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ НАПРЯЖЁННО-ДЕФОРМИРОВАННОГО СОСТОЯНИЯ ГОРНОГО МАССИВА | 2021 |
|
RU2763565C1 |
| Датчик отношения давлений | 1979 |
|
SU857765A1 |
| ДАТЧИК КОЛИЧЕСТВА ВОЗДУХА | 1970 |
|
SU268684A1 |
| Регулятор давления | 1981 |
|
SU962879A1 |
| Способ бесконтактного определения направления вращения и измерения скорости вращения объекта | 2024 |
|
RU2831667C1 |
| ТАМПОНАЖНОЕ УСТРОЙСТВО | 1992 |
|
RU2066732C1 |
Изобретение относится к определению перемещения тел и позволяет повысить точность путем обеспечения линейной зависимости обратной связи во всем диапазоне измерения. Датчик содержит корпус 1, соосно установленные питающее 13 и приемное 5 сопла. Последнее закреплено на плоской пружине 6 и имеет две пластины 7, установленные жестко снаружи сопла 5 под углом к его продольной оси с раскрытием угла к отверстию сопла 5. Пружина 6 имеет продольный паз 12, в котором установлен элемент крепления сопла 5 к корпусу 1. При перемещении штока 2 сопло 13 приближается к соплу 5. При этом на пластинах 7 возникает подъемная сила, пружина 6 изгибается, сопло 5 выходит в зону меньших скоростей струи. Одновременно несколько уменьшается его мидель. Значение выходного давления снижается. Сравнивая входное и выходное давления, определяют перемещение штока 2 и контролируемого тела. 1 з.п. ф-лы, 2 ил.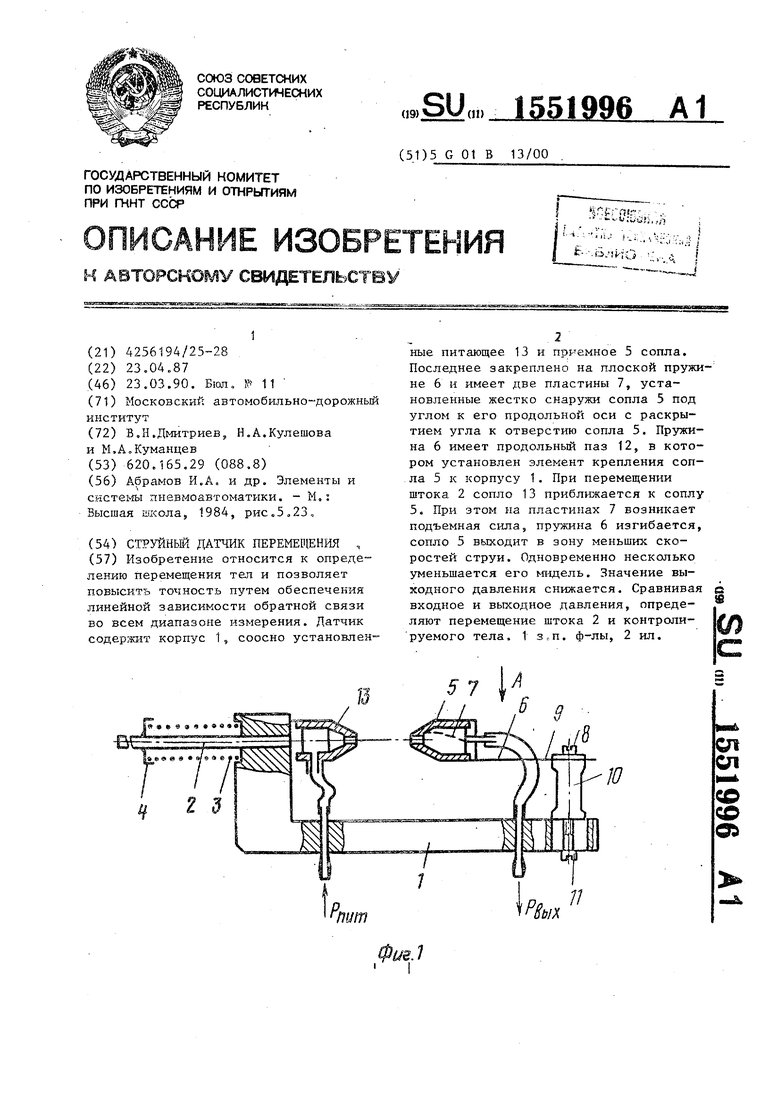
t у .
пчт
ел
СП
СО
со
Од
Р8ых
11
фиг.1
Изобретение относится к контрольно- измерительной технике и может быть использовано для определения перемещения различных тел в пневматических системах роботов и манипуляторов.
Целью изобретения является повышение точности путем обеспечения ли- нейной зависимости обратной связи во всем диапазоне измерения.
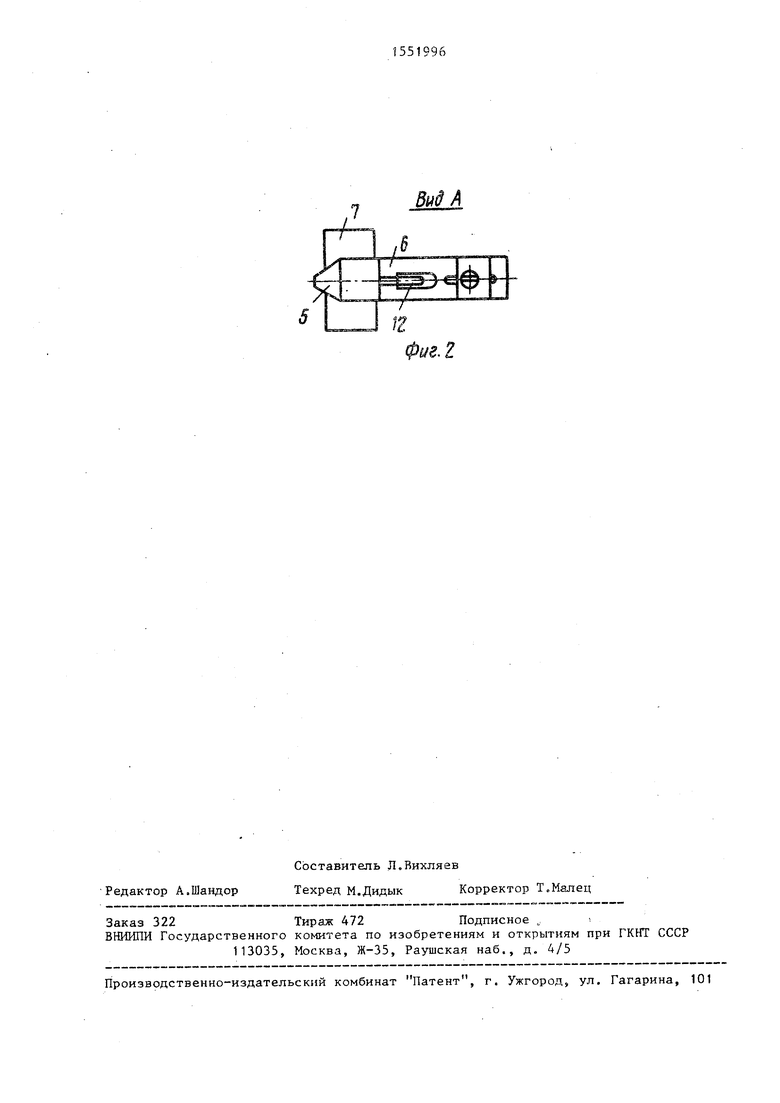
На фиг.1 изображена схема датчика; на фиг.2 - вид А на фиг.1.
Струйный датчик перемещения содержит корпус 1, измерительный шток 2, подпружиненный пружиной 3 относитель- но корпуса 1. Пружина 3 одним концом закреплена на корпусе 1, а вторым - на шайбе 4, жестко установленной на штоке 2. Приемное сопло 5 закреплено на плоской пружине 6. Две пластины 7 жестко установлены снаружи приемного сопла 5 под углом к его продольной оси с раскрытием угла к отверстию сопла 5. Элемент крепления пружины 6 выполнен в виде винта 8, пластины 9, стойки 10 и винта 11. Винты 8 и 11 и прорези 12 в плоской пружине 6 и корпусе 1 позволяют осуществлять регулировку длины пружины 6 и тем самым изменять коэффициент отрицательной обратной связи при сохранении заданного расстояния между приемным соплом 5 и питающим соплом 13. Последнее установлено в корпусе 1 соосно соплу 5 и жестко связано с измерительным штоком 2.
Датчик работает следующим образом. Шток 2 касается тела, перемещение которого надо измерить. При перемещении последнего шток 2 перемещается, при этом происходит перемещение сопла 13. При приближении питающего сопла 13 к приемному соплу 5 скорость потока, набегающего на пластинки 7, увеличивается, что в свою очередь, при- водит к возрастанию подъемной силы и отклонению приемного сопла 5 вверх. Приемное отверстие сопла 5 входит в зону меньших скоростей струи и, кроме того, несколько уменьшается его ми
дель. Значение выходного давления
0 5
0
5
0
0
снижается пропорционально перемещению питающего сопла 13. Плоская пружина 6 служит основанием для установки приемного сопла 5 и обеспечивает его подвижность, что дает возможность в сочетании с пластинами 7 осуществить отрицательную обратную связь, которая повышает точность и быстродействие датчика.
Измеряя давление воздуха на выходе из приемного сопла 5 и сравнивая его с давлением в питающем сопле 13 определяют перемещение штока 2, а следовательно, и контролируемого тела.
Использование предлагаемого датчика позволит получить значительный экономический эффект при применении в системах контроля и регулирования технологических процессов за счет повышения качества выпускаемой продукции и экономии энергии и материалов .
Формула изобретения
с корпусом, жестко соединенное с измерительным штоком питающее сопло, установленное соосно приемному, элемент отрицательной обратной связи между питающим и приемным соплами, отличающийся тем, что, с целью повышения точности путем обеспечения линейной зависимости во всем диапазоне измерения, элемент отрицательной обратной связи выполнен в виде двух пластин, жестко установленных снаружи приемного сопла под углом к его продольной оси с раскрытием угла к отверстию сопла, а связь приемного сопла с корпусом выполнена в виде упругого элемента.
%
Вид А
12
фиг. 1
