i т ,
1
/
и,
Ж
5


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения линейного размера объекта | 1989 |
|
SU1670402A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2139640C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1987 |
|
RU1612956C |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2143182C1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1985 |
|
SU1286089A1 |
| Устройство для измерения линейных размеров проката | 1984 |
|
SU1196690A1 |
| Способ измерения положения объекта и устройство для его осуществления | 1988 |
|
SU1539525A1 |
| Устройство для контроля фокусного расстояния и линейного увеличения оптических и оптико-электронных систем | 1984 |
|
SU1383126A1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2170437C1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2010 |
|
RU2426265C1 |
Изобретение относится к измерительной технике и может быть использовано для измерения перемещений и координат объектов. Цель изобретения - повышение точности измерения путем исключения влияний изменений яркости изображения, значительных низкочастотных помех, дрейфа параметров фотопреобразователя и паразитных засветок фотопреобразователя. На фотопреобразователь 4 на ПЗС проецируют изображение диафрагмы 2 таким образом, чтобы ширина изображения была бы больше периода расположения фоточувствительных ячеек фотопреобразователя 4 на ПЗС. Преобразовывают изображение в видеосигнал. Полученный видеосигнал сравнивают с 2к1, где К1≥1, целое, опорными уровнями в блоке 6 сравнения. При каждом совпадении сигнала с опорным уровнем формируется временной интервал, длительность которого измеряется подсчетом импульсов счетчиком 10. Блок 11 цифровой обработки осуществляет суммирование длительностей всех сформированных интервалов за К2, где К2≥1, целое, периодов видеосигнала. Блок 7 обнаружения ошибки фиксирует превышение верхнего опорного уровня в каждом периоде видеосигнала. По коду суммы длительностей временных интервалов судят о положении объекта. 10 ил.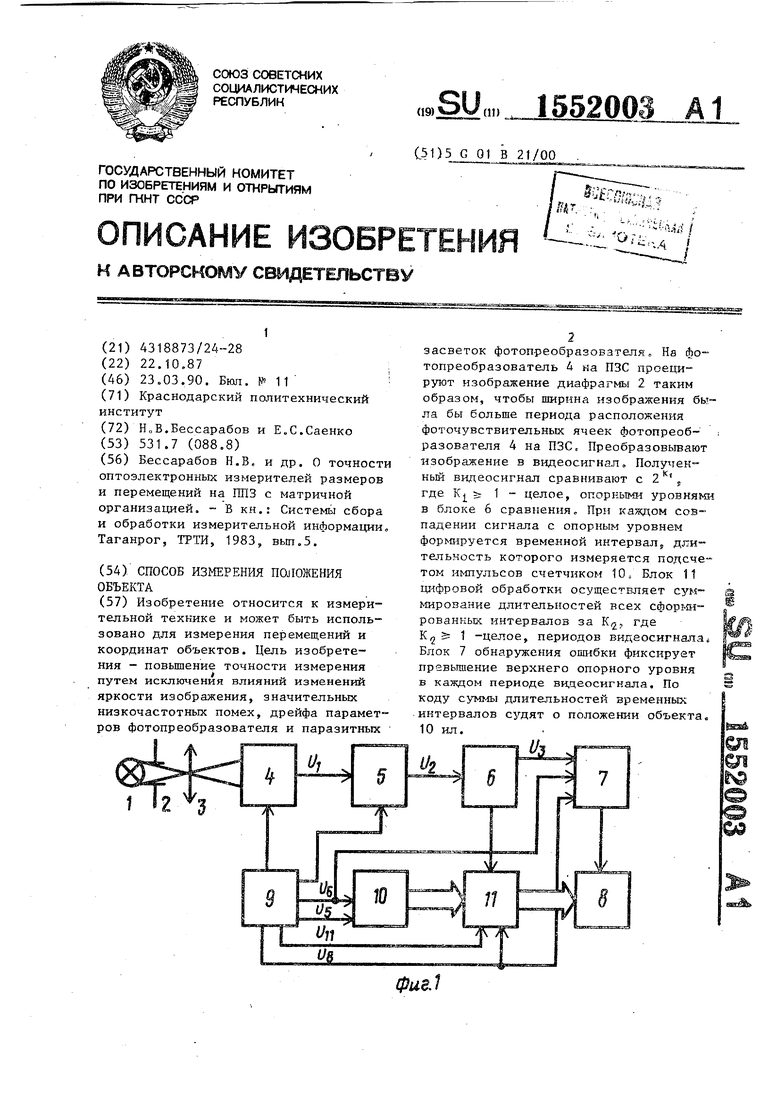
ад
Us
vn
i/g
70
11
фиё.1
Изобретение относится к измерительной технике и может быть использовано для измерения перемещений и координат объектов.
Цель изобретения - повышение точности измерения путем исключения влияний изменений яркости изображения, значительных низкочастотных помех, дрейфа параметров фотопреобра- 10 зователя и тракта аналоговой обработки видеосигнала и паразитных засветок регистра сдвига фотопреобразовате- ля, имеющих значительные низкочастотные составляющие пространственного 15 спектра.
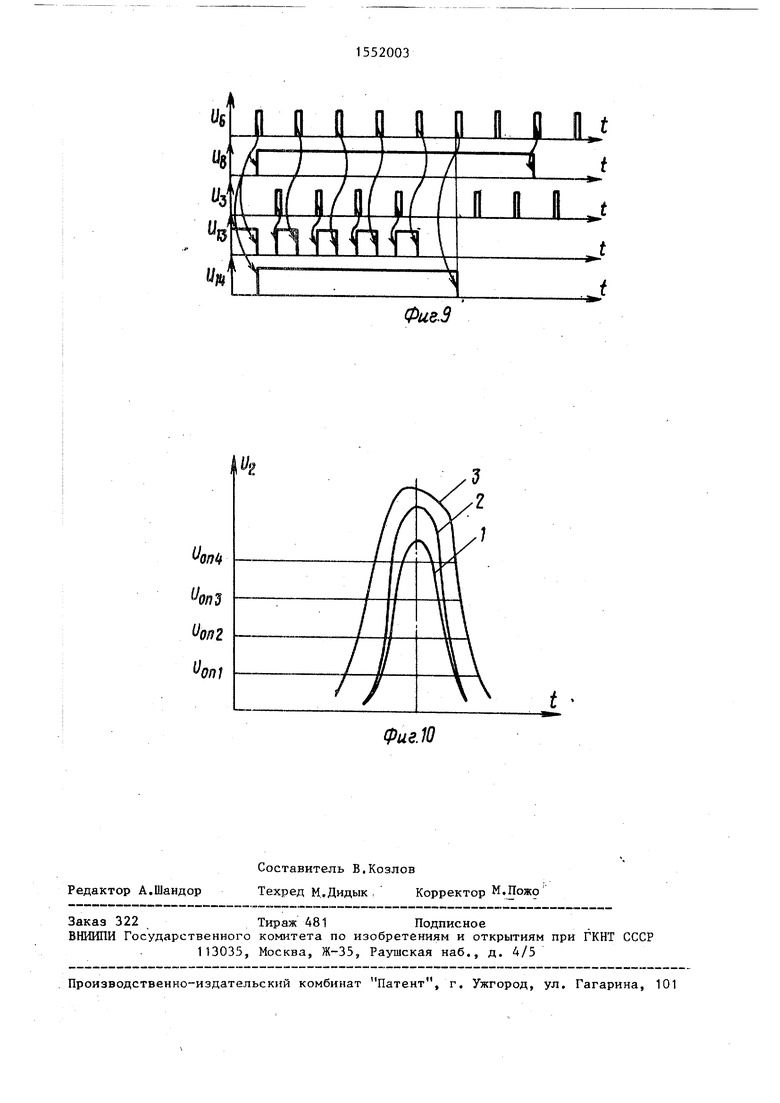
На фиг.1 дана функциональная схе- Ма устройства для осуществления способа измерений; на фиг.2 - схема бло- |ка управления; на фиг.З - схема блока 20 цифровой обработки; на фиг.4 - схема блока управления записью; на фиг.5 - схема блока обнаружения ошибки; на фиг.6 - вариант исполнения формирователя стробов записи; на фиг.7 - диа- .25 граммы напряжений, поясняющие работу блока сравненияЈ на фиг.8 - диаграммы напряжений, поясняющие работу блока управления записью; на фиг.9 - диаграммы напряжений, поясняющие ра- 30 боту блока обнаружения ошибки; на фиг.10 - эскиз формы видеоимпульса при различных освещенностях.
Устройство, реализующее способ измерения положения объекта, содержит оптически связанные источник 1 света, диафрагму 2, объектив 3 и фотопреобразователь 4 на приборе с зарядовой связью (ПЗС), последовательно соединенные блок 5 выборки, блок 6 срав- п йения, блок 7 обнаружения ошибки и регистратор 8, последовательно соединенные блок 9 управления, счетчик 10, блок 11 цифровой обработки. Вход блока 5 выборки подключен к выходу фото- 45 преобразователя 4 на ПЗС, к управляющему входу которого подключен второй выход блока 9 управления, третий выход которого подключен к объединенным второму входу счетчика 10 и второму входу блока 7 обнаружения ошибки, третий вход которого объединен с вторым входом блока 11 цифровой обработки и подключен к четвертому вы- tходу блока 9 управления, пятый выход которого подключен к третьему входу блока 11 цифровой обработки. Шестой выход блока 9 управления подключен к второму входу блока 5 выборки. Вто50
55
п 5
0
5
рой выход блока 6 сравнения подключен к четвертому входу блока 11 цифровой обработки, информационные выходы которого подключены к информационным входам регистратора 8.
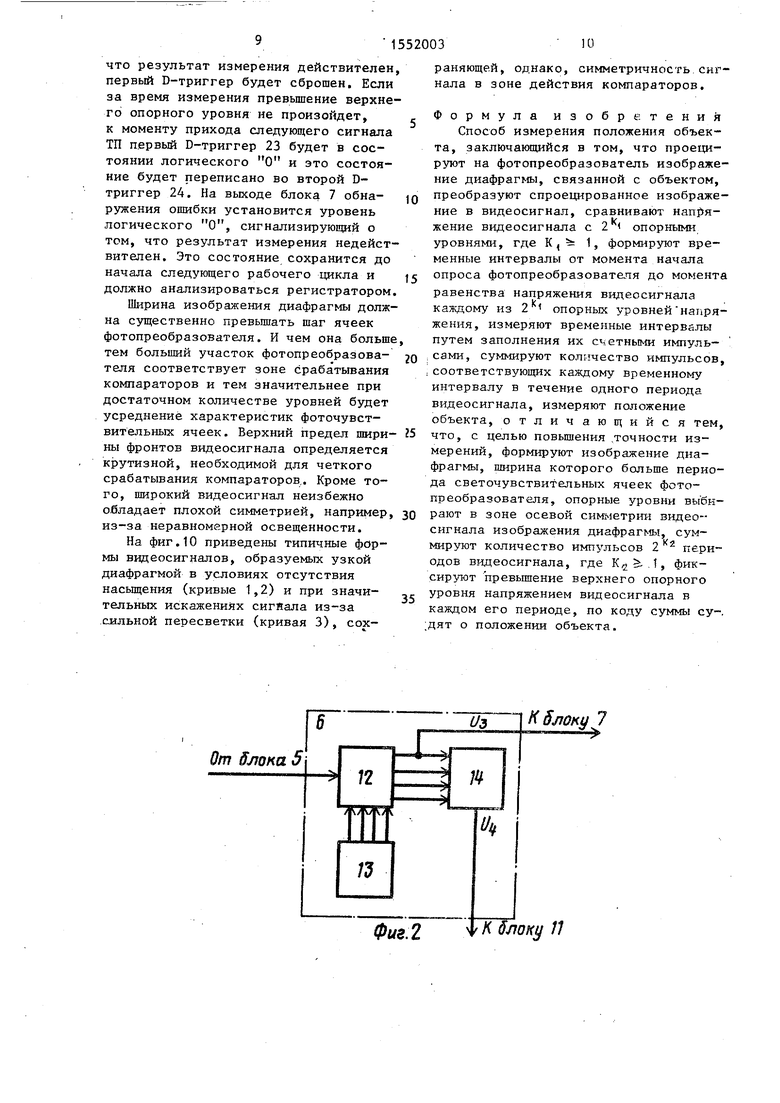
Блок 6 сравнения (фиг.2) может содержать блок 12 компараторов, содержащий 2К( , где К, i. 1, целое, компараторов, источник 13 опорных напряжений и формирователь 14 стробов записи. Источник 13 опорных напряжений подключен своими выходами к управляющим входам блока 12 компараторов, первый вход которого является входом блока 6 сравнения.
Выходы блока 12 компараторов подключены к входу формирователя 14
стробов записи. Выход верхнего oriop- i
ного уровня блока 12 компараторов является первым выходом блока 6 сравнения, вторым выходом которого является выход формирователя 14 стробов записи.
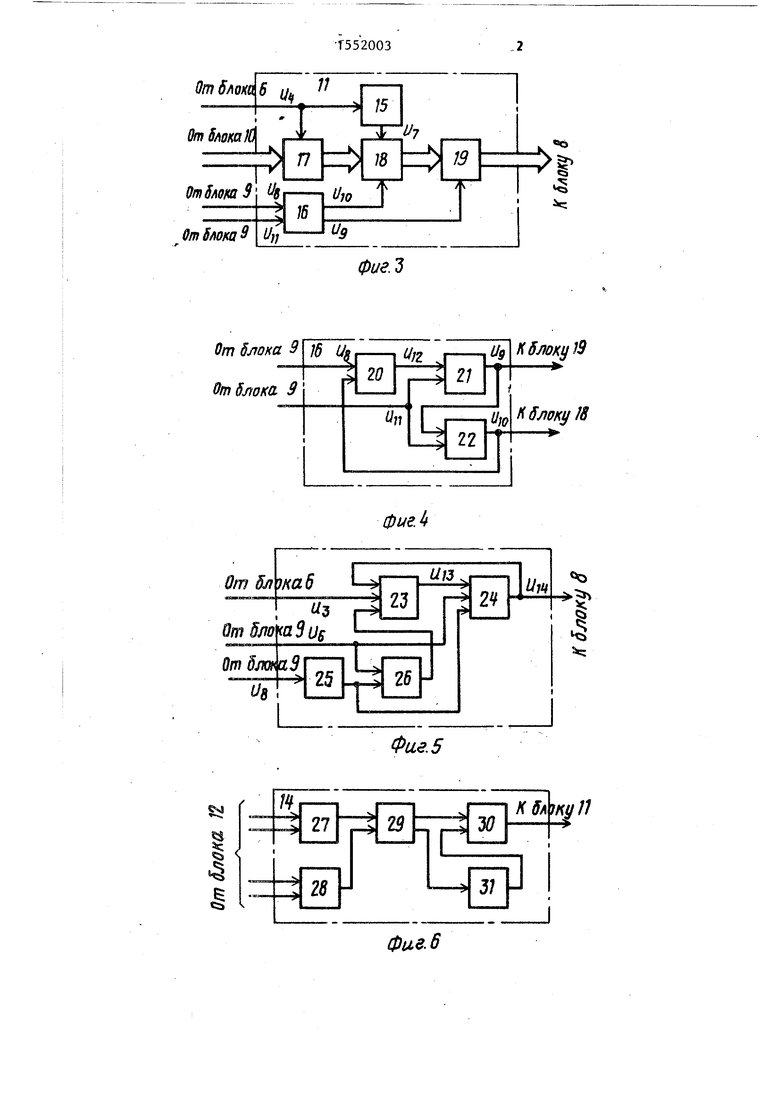
Блок 11 цифровой обработки (фиг.З) может содержать блок 15 задержки, блок 16 управления записью результата и последовательно включенные регистр 17 номера импульса заполнения, входы которого являются первыми входами блока 11 цифровой обработки, накапливающего сумматора 18 и регистра 19 результата, причем вход блока 15 задержки и вход записи регистра 17 номера импульса заполнения объединены и являются четвертым входом блока 11 цифровой обработки, выход блока 15 задержки подключен к входу записи накапливающего сумматора 18, выходы регистра 19 являются информационными выходами блока 11 цифровой обработки. Вход установки и вход регистровой частоты блока 16 управления записью результата являются соответственно вторым и третьим входами блока 11 цифровой обработки. Выходы сигналов сброса и записи блока 16 управления записью результата подключены, соответственно, к входу сброса накапливающего сумматора 18 и входу записи регистра 19 результата.
Блок 16 управления записью результата (фиг.4) содержит RS-триггер 20, вход установки которого является входом установки блока 16, первьй 21 и второй 22 В-триг.геры, причем информационный вход первого D-триггера 21 объединены с прямым выходом RS- триггера 20, прямой выход - с информационным входом второго D-триггера 22 и является выходом записи блока 16 управления записью результата. Прямой выход триггера 22 подключен к входу сброса RS-триггера 20 и является выходом сброса блока 16 управления записью результата. Входы синхронизации первого 21 и второго 22 D-триггероЁ объединены и являются входом регистровой частоты блока 16 управления записью результата.
Блок 7 обнаружения ошибки (фиг.5) содержит первый D-триггер 23, вход синхронизации которого является первым входом блока 7 обнаружения -ошибки, второй D-триггер 24, информационным входом подключен к прямому выход первого D-триггера 23, а прямым выходом - к информационному входу первого D-триггера 23 и к выходу блока 7 обнаружения ошибки, формирователь 25 сигнала сброса, входом подключенный к третьему входу блока 7 обнаружения ошибки, логический элемент ИЛИ 26, первый вход которого является вторым входом блока 7 обнаружения ошибки и подключен к входу синхронизации второго D-триггера 24. Второй вход логического элемента ИЛИ 26 подключен к выходу формирователя 25 и входу установки второго D-триггера 24, а выход - к входу сброса первого D-триггера 23„
Формирователь 14 стробов записи (фиг.6) содержит первый 27, второй 28, третий 29 и четвертый 30 логические элементы ИСКЛЮЧАЮЩЕЕ ИЛИ и элемент 31 задержки. Входы первого 27 и второго логических элементов ИСКЛЮЧАЮЩЕЕ ИЛИ являются входами формирователя 14 стробов записи. Выходы первого 27 и второго 28 логических элементов ИСКЛЮЧАЮЩЕЕ ИЛИ подключены соответственно к входам тре- тьего логического элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 29,первый выход которого подключен к первому входу четвертого логического элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 30, к второму входу которого подключен выход элемента 31 задержки, вход которого подключен к второму входу третьего логического элемента ИСКЛЮ- ЧАЩЕЕ ИЛИ 29. Выход четвертого логического элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 30 является выходом формирователя 14 стробоз записи.
Способ осуществляется устройством следующим образом.
5
0
Источник 1 света освецает днафряг- му 2, связанную с объектом. Изображение формируется объективом 3 на поверхности фотопреобразователя 4. При изменении положения объекта происходит перемещение изображения связанной с ним диафрагмы 2 по поверхности фотопреобразователя 4. Под управлением
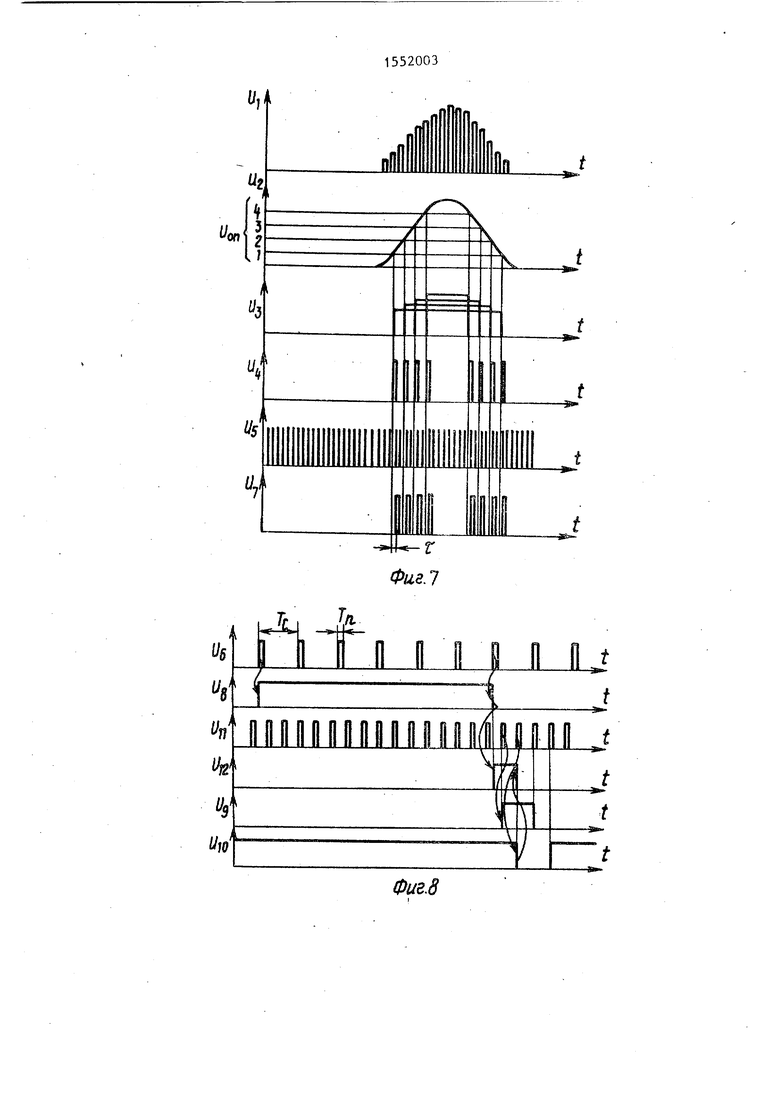
Q блока 9 управления на выходе фотопреобразователя 4 на ПЗС формируется последовательность видеоимпульсов и (фиг,7), амплитуды которых про- порционапьны распределению освещен- ностей в изображении диафрагмы 2. С выхода фотопреобразователя 4 на ПЗС видеоимпульсы V (фкг.1) поступают на вход блока 5 выборки, где из них с помощью двойкой коррелированной выборки с последующей фильтрацией фильтром нижних частот «ыделлется огибающая U пачки видео- импульсов. Управление двойной коррелированной выборкой осуществляется
5 с помэщью сигнала, подаваемого с блока 9 управления. Сигнал U2 с выхода блока 5 выборки поступает на первые
if
входы 2 компараторов блока 12 ком- тар эторов, на вторые входы которых 0 поданы опорные уровни Uon s. .. ,11опг от источника 13 опорных напряжений. Сигналы U (фиг.2), образующиеся в
результате компарирования, поступают с выходов компаратора на входы фор5 мирсвателя 14 стробов записи, вырабатывающего на выходе последовательность стробов 1Тф записи по положительным и отрицательным фронтам им- пульсов U. В рассматриваемом примере
0 реализации устройства К(2, следовательно 5 на фиг.7-9 использовано четыре компаратора и на выходе формирователя 14 вырабатывается 8 стробов записи, С выхода импульсов заполне-
5 ния блока 9 управления на счетный вход счетчика 10 импульсов частоты заполнения поступают импульсы Us частоты заполнения. С выхода импульсов времени сдвига блока 9 управления на
0 вход сброса счетчика 10 импульсов
частоты заполнения поступают импульсы
Ug длительностью Тп (время переписи зарядовых пакетов из секции накопления в регистр сдвига фотопреобразова- 5 теля 4 на ПЗС) и с периодом Тс (время сдвига зарядовых пакетов в регистре фотопреобразователя 4 на ПЗС). На счетный вход счетчика 10 поступают импульсы U$ частоты заполнения. По
положительному уровню импульсов U6 счетчик 10 сбрасывается и находится в сброшенном состоянии в течение времени переписи Тп.
По положительному фронту каждого строба 1ц записи, поступающему на вход записи регистра 17 номера импульса заполнения, записывается код содержимого счетчика 10, подсчиты- вающего импульсы частоты заполнения, а по положительному фронту каждого импульса, задержанного блоком 15 задержки строба записи, код, хранящийся в регистре 17 номера импульса за- полнения, складывается в накапливающем сумматоре 18 с накопленной в нем суммой.
По положительному фронту импульсо Ug в блоке 9 управления формируется сигнал Ug Рабочий цикл. Например, по положительному фронту первого импульса U6 на выходе сигнала рабочего цикла блока 9 управления появляет ся перепад напряжения Ug, являющийся началом сигнала Рабочий цикл, а по
V t |
положительному фронту 2 г импульса где 1 - целое, U, - отрицательный фронт сигнала Ug, определяющий конец сигнала Рабочий цикл (фиг.8) Сформированный сигнал Рабочий цикл подается на вход установки S RS-триг гера 20. С шестого выхода блока 9 управления на входы синхронизации первого 21 и второго 22 D-триггеров подаются импульсы UH регистровой частоты. По отрицательному фронту импульса Ue RS-триггер 20 устанавливается и напряжение логической 1 с его прямого выхода передается на информационный вход первого D-три гера 21. С приходом на вход синхронизации первого D-триггера 21 положи- .тельного фронта очередного импульса
U,, регистровой частоты, он устанавливается в состояние логической 1, на его прямом выходе формируется положительный фронт сигнала U) записи результата, по которому результат измерения переписывается из накапливающего сумматора 18 в регистр 19 результата, причем на информационные входы регистра 19 результата подается код суммы начиная с (К +К2+1)/2-го младшего разряда и кончая старшим разрядом. Такое подключение эквивалентно сдвигу кода суммы на ( +1)/2 разрядов вправо, т.е. делению
на 2(к + +). , где К,, К
1
суммы ..« «.,
целые, К 1, К г ь 1 .
Выбор количества учитываемых в результате разрядов основан на следующих соображениях. Пусть - число эталонных уровней в блоке 6 сравнения. Результат измерения получают путем суммирования результатов одиночных измерений. Случайные погрешности измерения при этом уменьшаются в первом приближении в -fn раз, где п 2 а, а - общее число суммирований за рабочий цикл. Если суммируемые коды имеют Р разрядов, то для представления результата и суммирований требуется п P+1+K/)+Ki разрядов. Если бы погрешность результата не зависела от количества измерений, для представления результата было бы достаточно Р старших разрядов суммы. Для отображения дополнительной информации, обеспечивающей уменьшение погрешности в раз, необходимо дополнительно
logt-Jn --- logl (K,+K2 + 1)
двоичных разрядов. Тогда в результа- те требуется сохранить ( ) двоичных разрядов, т.е. можно
не учитывать Р4 -Р -г- (К,,+К2+1) младших разрядов суммы. Результат измерения, записанный в регистре 19, далее поступает на регистратор 8, в котором производится масштабирование и дальнейшая обработка. В качестве регистратора в рассматриваемом варианте использована микроЭВМ.
Блок 7 обнаружения ошибки работает следующим образом. С приходом положительного фронта сигнала Ug Рабочий цикл формирователь 25 импульса сброса вырабатывает короткий импульс, / устанавливающий первый 0-триггер 23 в состояние логического О, а второй - в состояние логической 1. Если за время измерения произошло превышение верхнего опорного уровня, состояние логической 1 будет переписано из второго D-триггера 24 в первый и с приходом очередного сигнала ТП состояние логической 1 будет вновь записано во второй D-триг- гер, т.е. его состояние не изменится и на выходе блока обнаружения ошибки состояние логической 1, означающее
что результат измерения действителен, первый D-триггер будет сброшен. Если за время измерения превышение верхнего опорного уровня не произойдет, к моменту прихода следующего сигнала ТП первый D-триггер 23 будет в состоянии логического О и это состояние будет переписано во второй D- триггер 24. На выходе блока 7 обнаружения ошибки установится уровень логического О, сигнализирующий о том, что результат измерения недействителен. Это состояние сохранится до начала следующего рабочего цикла и должно анализироваться регистратором.
Ширина изображения диафрагмы должна существенно превышать шаг ячеек фотопреобразователя. И чем она больше тем больший участок фотопреобразователя соответствует зоне срабатывания компараторов и тем значительнее при достаточном количестве уровней будет усреднение характеристик фоточувствительных ячеек. Верхний предел шири- ны фронтов видеосигнала определяется крутизной, необходимой для четкого срабатывания компараторов. Кроме того, широкий видеосигнал неизбежно обладает плохой симметрией, например, из-за неравномерной освещенности.
На фиг.10 приведены типичные формы видеосигналов, образуемых узкой диафрагмой в условиях отсутствия насыщения (кривые 1,2) и при значительных искажениях сигнала из-за сильной пересветки (кривая 3), сох
5
5 о
0
5
раняющей, однако, симметричность сигнала в зоне действия компараторов.
Формула изобретения Способ измерения положения объекта, заключающийся в том, что проецируют на фотопреобразователь изображение диафрагмы, связанной с объектом, преобразуют спроецированное изображение в видеосигнал, сравнивают напряжение видеосигнала с 2 опорными уровнями, где К, 1, формируют временные интервалы от момента начала опроса фотопреобразователя до момента
равенства напряжения видеосигнала каждому из 2 опорных уровней напряжения, измеряют временные интервалы путем заполнения их счетными импульсами, суммируют количество импульсов, соответствующих каждому временному интервалу в течение одного периода видеосигнала, измеряют положение объекта, отличающийся тем, что, с целью повышения точности измерений, формируют изображение диафрагмы, ширина которого больше периода светочувствительных ячеек фотопреобразователя, опорные уровни выбирают в зоне осевой симметрии видеосигнала изображения диафрагмы, суммируют количество импульсов 2 2 периодов видеосигнала, где Kg - t, фиксируют превышение верхнего опорного уровня напряжением видеосигнала в каждом его периоде, по коду суммы су-, .дят о положении объекта.
От блока 9
1 Ј
I
фиг.Ъ
фиеЛ
Фае. 5
Фиё.6
и
ML JL
11Ш1ШШ
ML JLJULJL
Фие.8
6
u
Фие.З
Фие.Ю
| Бессарабов Н.В, и др | |||
| О точности оптоэлектронных измерителей размеров и перемещений на ППЗ с матричной организацией | |||
| - В кн.: Системы сбора и обработки измерительной информации, Таганрог, ТРТИ, 1983, вып.5. |
