Изобретение относится к технике телевидения, в частности касается телевизионных систем автоматического управления, и может быть использовано при наблюдении и слежении за объектами в условиях применения ложных оптических целей.
Цель изобретения - повышение помехоустойчивости слежения за протяженными объектами при наличии ложных объектов.
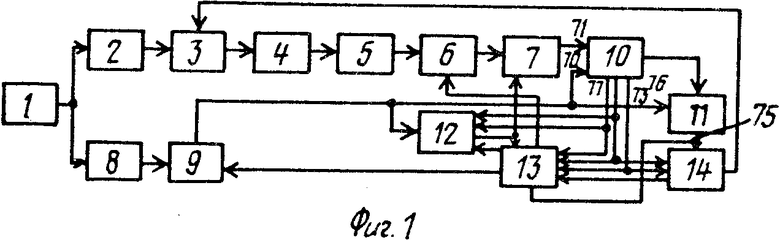
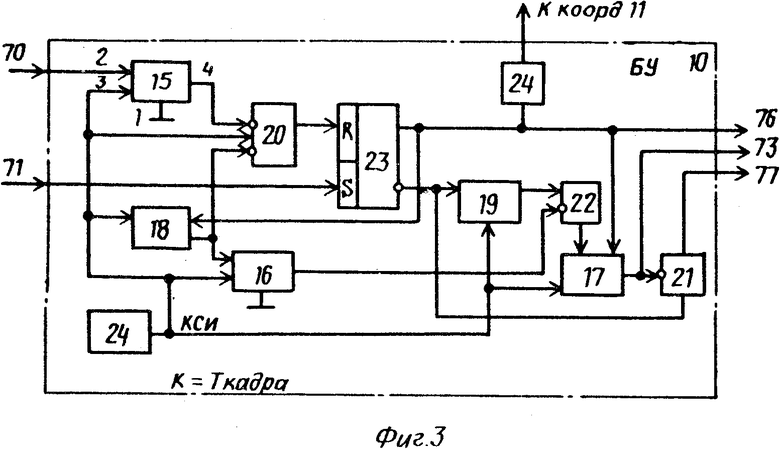
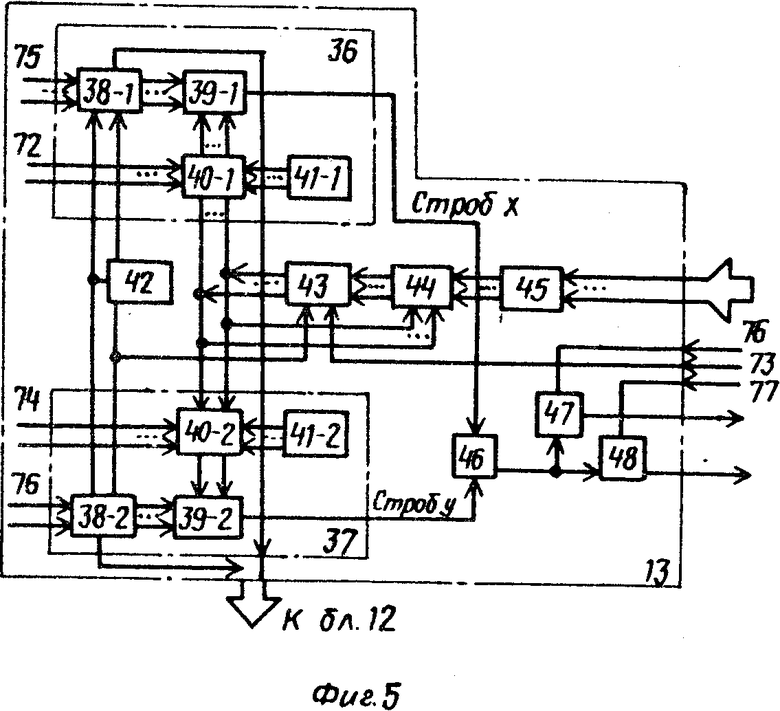
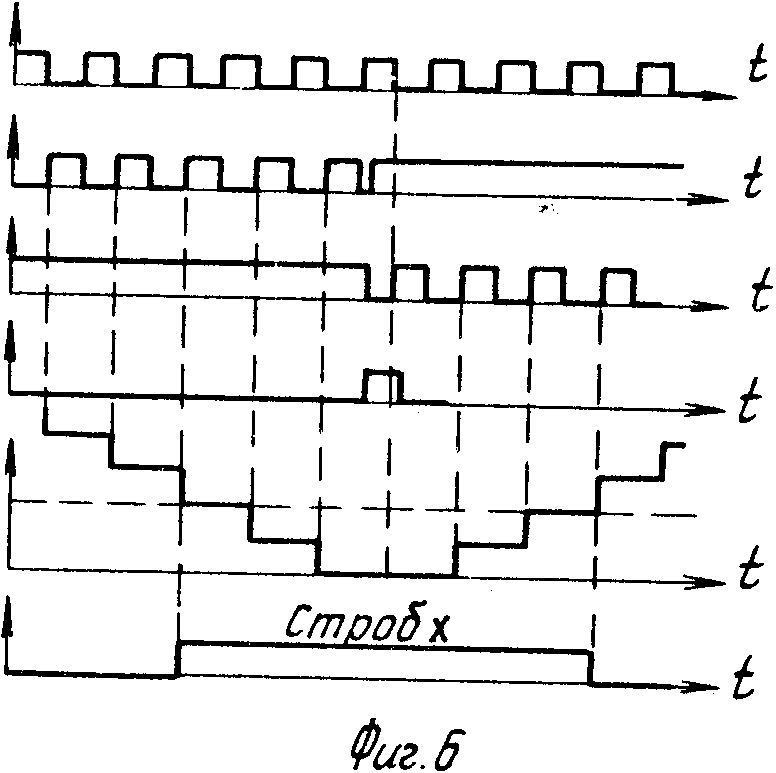
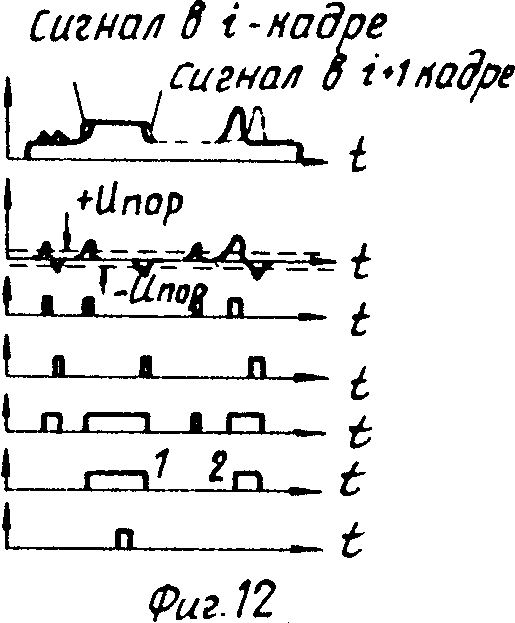
На фиг. 1 представлена структурная электрическая схема телевизионного следящего устройства. На фиг. 2 - временные диаграммы работы блока управления; на фиг. 3 - структурная электрическая схема блока управления; на фиг. 4 - структурная электрическая схема блока измерения размеров объекта; на фиг. 5 - структурная электрическая схема блока формирования строба; на фиг. 6 - временные диаграммы работы блока формирования строба; на фиг. 7 - структурная электрическая схема блока измерения скорости и направления; на фиг. 8 - структурная электрическая схема блока многоэлементной апертуры; на фиг. 9 - формирование сигнала многоэлементной апертуры; на фиг. 10 - алгоритм обработки логического блока; на фиг. 11 показан порядок нумерации сигналов многоэлементной апертуры; на фиг. 12 - формы сигналов на выходах телевизионного датчика, блока межкадровой разности, первого порогового блока, блока формирования импульсов объекта, сглаживающего фильтра и блока многоэлементной апертуры в режиме поиска.
Телевизионное следящее устройство содержит телевизоинный (ТВ) датчик 1, блок 2 межкадровой разности, первый пороговый блок 3, блок 4 формирования импульсов объектов, сглаживающий фильтр 5, второй элемент И 6, блок 7 многоэлементной апертуры, второй пороговый блок 8, первый элемент И 9, блок 10 управления, координатор 11, блок 12 измерения размеров объекта, блок 13 формирования строба, блок 14 измерения скорости и направления.
Блок 10 управления (см. фиг. 3) содержит таймеры 15-17, формирователи 18 и 19 импульсов, элемент И 20-22, триггер 23, генератор 24 тактовых импульсов (ГТИ).
Блок 12 измерения размеров объекта (см. фиг. 4) содержит элементы И 25-27, счетчики 28 и 29, регистры 30 и 31, генератор 32 тактовых импульсов (ГТИ), формирователь 33 импульсов, линию задержки 34, элемент НЕ 35.
Блок 13 формирования строба (см. фиг. 5) содержит каналы 36 и 37 формирования строба, каждый из которых состоит из реверсивного счетичка 38-1 (38-2), цифрового компаратора 39-1 (39-2), сумматора 40-1 (40-2) и переключателя 41-1 (41-2) установки начального размера строба, а также содержит генератор 42 тактовых импульсов (ГТИ), регистр 43, блок 44 суммирования, блок 45 вычисления модуля, элемент И 46, элементы ИЛИ 47, 48.
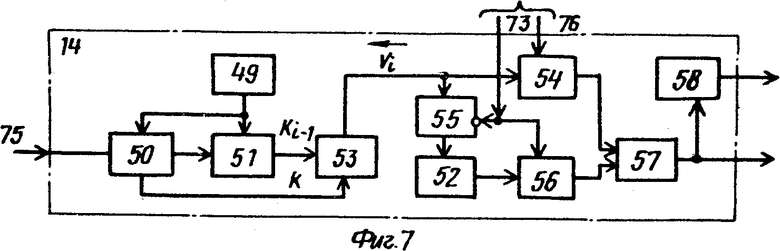
Блок 14 измерения скорости и направления (см. фиг. 7) содержит блок 49 задания интервала дискретизации, коммутатор 50, элементы 51 и 52 памяти, вычитатель 53, ключи 54-56, элемент ИЛИ 57, цифроаналоговый преобразователь (ЦАП) 58.
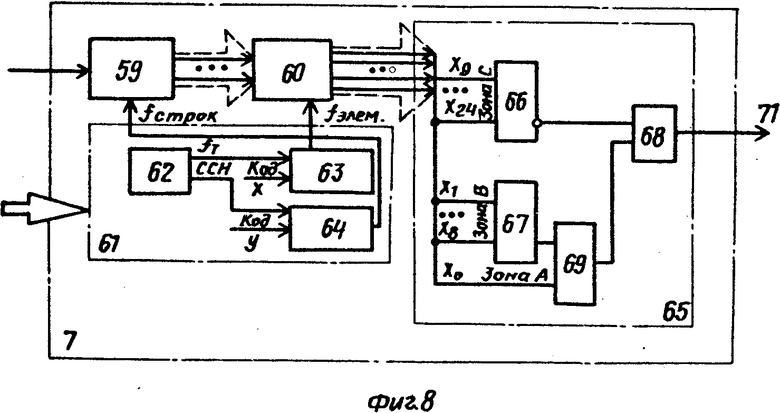
Блок 7 многоэлементной апертуры (см. фиг. 8) содержит блок 59 строчных задержек, блок 60 элементных задержек, блок 61 формирования интервала дискретизации, состоящий из генератора 62 тактовых импульсов (ГТИ) и делителей 63 и 64 частоты с переменным коэффициентом деления (ДПКД) и логический блок 65, состоящий из элементов ИЛИ 66, 67 и элементов И 68, 69.
Телевизионное следящее устройство работает в трех режимах: поиск 1, слежение и поиск 2. Режим поиска 1 - поиск объекта во всем растре. Режим поиска 2 - поиск объекта после срыва слежения на фоне ложных оптических целей, когда в устройстве уже получена информация о размере и векторе скорости объекта. На основании этой информации идет селекция, при этом режим поиска 2 осуществляется не по всему растру, а формируется строб поиска, с течением времени расширяющийся в направлении заполненного вектора скорости потерянного объекта. При необнаружении за это время объекта с искомыми параметрами устройство переходит в режим поиска 1. Режим поиска 1 происходит при больших дистанциях между ТВ датчиком 1 и объектом. Оптическая система ТВ датчика 1 оказывается неспособной различить детали формы сильно удаленного объекта. При этих условиях основное значение имеют общие размеры объекта, а детали его формы играют второстепенную роль. Таким образом, в качестве определяющих признаков при селекции в режиме поиска 1 выступают подвижность объекта и его размер, задаваемый нижним и верхним пределами по длительности видеосигнала от изображения объекта.
Режим работы устройства задается в блоке 10 управления на основании анализа сигналов, поступающих на его вход по каналам поиска и слежения.
Рассмотрим работу блока 10 управления по эпюрам входных и выходных сигналов (см. фиг. 2) и его работе (см. фиг. 3). На основании поступающих в блок 10 управления сигналов формируются три логических сигнала режима работы: поиск 1 (см. фиг. 2, в), слежение (см. фиг. 2, г), поиск 2 (см. фиг. 2, д). Эти сигналы поступают в координатор 11, блок 12, блок 13 и блок 14 и определяют их работу в различных режимах.
В начальный момент времени телевизионное следящее устройство находится в режиме поиск 1. В этом режиме в канале поиска идет обработка сигнала и при попадании объекта в поле зрения ТВ датчика 1 происходит выделение сигнала объекта на выходе блока 7 многоэлементной апертуры. При появлении сигнала объекта на первом входе 70 блока 10 управления (см. фиг. 2, а) триггер 23 переключается в противоположное состояние, при этом происходит переключение режима поиска в режим слежения (см. фиг. 2, момент t1). Момент переключения (положительный фронт сигнала фиг. 2, г) фиксируется в координаторе 11 как координата обнаруженного объекта. В результате в следующем кадре строб слежения совпадает с импульсами объектов в канале слежения. Таким образом, импульсы объекта поиска "настраивают" координатор 11 на объект через блок 10 управления, не поступая в координатор 11 непосредственно. Это возможно за счет того, что момент переключения из режима поиска 1 в режим слежения ввиду пространственно-временной структуры сигнала несет в себе информацию о координате обнаруженного в режиме поиска 1 объекта и отпадает необходимость подавать импульсы объекта поиска в координатор 11.
В момент t1 (см. фиг. 2) сигнал с прямого выхода триггера 23 поступает на формирователь 18 импульсов, на выходе которого по положительному фронту сигнала формируется импульс, не позволяющий триггеру 13 в течение одного кадра переключаться в обратное состояние (режим поиска). Это связано с необходимостью задержки формирования в координаторе 11 координаты обнаруженного объекта, подачи его в блок 13, что приведет к открытию первого элемента И 9 и появлению импульсов объектов слежения в канале слежения на втором входе 71 блока 10 управления (см. фиг. 2б) и координатора 11 только в следующем кадре. Импульсы объекта слежения поступают на вход блока 10 управления - таймер 15 (см. фиг. 2, б). Это необходимо, чтобы при случайном исчезновении импульсов объекта слежения устройство оставалось в режиме слежения и ожидало появления их в последующих кадрах. Время такого ожидания в устройстве установлено равным 5 кадрам. Если импульсов объекта слежения пропало больше, чем на 5 кадров, таймер 15 сработает - откроет элемент И 20 и переведет триггер 13 в режим поиска (момент t2, фиг. 2).
Таймер 16 необходим для анализа продолжительности режима слежения, для последующего перехода при срыве в режиме поиска 1 или поиска 2. Это необходимо, чтобы при случайном переходе в слежение после того как выяснится, что импульсы объекта слежения не появляются, система не переходила в режим расширяющегося строба в режиме поиска 2. Если слежение было длительным Δtc = t4 - t3 > 20 Т кадра и в момент t4(см. фиг. 2) произошел срыв слежения, то устройство перейдет в режим поиска 2, т. к. при слежении более 20 ТК в блоке 14 и блоке 12 будет сформирована информация о скорости и размерах объекта слежения.
Если режим слежения выполнялся больше 20 ТК, то по истечении этого времени таймер 16 откроет элемент И 22 и при срыве слежения положительным фронтом инверсного выходного сигнала триггера 23 (момент t4 фиг. 2), выделенным формирователем импульсов 19, запустится таймер 17, который включает режим поиска 2, продолжающийся Δtn2 = t6 - t4 = 100 ТК. Если по истечении этого времени объект в канале поиска не селектируется, то устройство переходит в режим поиска 1 (момент t6 фиг. 2), в противном случае устройство возвращается в режим слежения. Времена срабатывания таймеров 15-17 взяты соответственно 5 Тк, 20 ТК (1 с), 100 ТК (5 с).
Рассмотрим в начале работу устройства в режиме слежения, так как обработка в канале слежения более проста. Сигнал с выхода телевизионного датчика 1 преобразовывается в двухуровневый логический сигнал в пороговом блоке 8 и через элемент И 9, выполняющий роль логического ключа, управляемого сигналом строба слежения, и блок 10 управления поступает в координатор 11. Начальный размер строба, вырабатываемый в блоке 13 формирования строба, выбирается таким, чтобы он был больше объекта в момент обнаружения с учетом априорно известной максимальной скорости перемещения объекта. Сигнал импульсов объекта слежения с выхода блока 9 поступает в блок 12 измерения размера объекта, а сигналы координаты с выхода блока 11 поступают в блок 14 измерения скорости и направления. Блок 12 (см. фиг. 4) состоит из двух каналов измерения координат Х и Y и блоков управления.
Рассмотрим работу блока 12 на примере работы канала измерения координаты Х.
В элементе И 25 происходит модуляция (заполнение) видеосигнала от объекта, совпадающего со стробом слежения и измерительным сигналом, импульсами тактовой частоты fт = 10 МГц. Число импульсов на выходе элемента И 25 оказывается пропорционально размеру объекта и подсчитывается счетчиком 28, а затем через регистр 30 поступает на выход 72 блока 12. При переходе устройства в режим поиска 2 по команде с третьего выхода 73 блока 10 управления (см. фиг. 2, д) прекращается перезапись из счетчика 28, последнее значение кода размера объекта фиксируется в регистре 30 и поступает на выход 72 во время выполнения режима поиска 2. Измерение размера происходит заново в каждом кадре, что осуществляется сбросом счетчика 28 в "0" кадровыми синхроимпульсами через формирователь импульсов 33 и линию задержки 34. Один раз за кадр размер объекта переписывается в регистр 30 и подается на выход 72. Код размера объекта используется затем для установки необходимого размера строба и частоты дискритизации блока 7 многоэлементной апертуры. Элемент И 35 необходим, чтобы в режиме поиска 2 не происходило записи "0" в регистре 30. При сигнале "Режим" (см. фиг. 2, д), равным 1, в регистр 30 по импульсу записи переписывается информация, при сигнале "Режим", равном 0, регистр 30 обнуляется и ни на какие сигналы не реагирует. Кадровый канал выполнен аналогично и имеет выход 74. При сближении с объектом его размер будет увеличиваться. Измеренные размеры объекта в каждом кадре из блока 12 поступают в блок 13 формирования строба, сюда же поступают из координатора 11 (выход 75) измеренные координаты объекта. В блоке 13 (см. фиг. 5) формируется стробирующий сигнал, позволяющий уменьшить поле наблюдения объекта в кадре с помощью элементов И 9 и 6, вырезающих из всего видеосигнала ТВ датчика 1 ту часть сигнала, которая расположена в зоне сформированного строба. В блоке формируется два вида строба: слежения и поиска. Сигнал строба слежения формируется на основании текущих измеренных размеров и координаты объекта, за которым осуществляется слежение по команде блока 10 управления, сигнал строба поиска формируется на основании заполненных размеров и вектора скорости объекта. Эпюры сигналов показаны на фиг. 6. Блок 13 формирования строба состоит из двух аналогичных каналов 36 и 37 формирования строба.
Рассмотрим работу блока 13 на примере канала 37 формирования строба.
Основу блока 13 составляют реверсивные счетчики 38-1 и 38-2.
В реверсивный счетчик 38-1 по окончании строчного синхроимпульса записывается код координаты Х и затем происходит считывание этой координаты до нуля импульсами с ГТИ 42 (см. фиг. 6, б). В момент равенства кода реверсивного счетчика 38-1 нулю последний реверсируется и начинается прямой счет импульсов с ГТИ 42 (см. фиг. 6, в). Изменяющийся во времени код (см. фиг. 6, д) с реверсивного счетчика 38-1 поступает на вход цифрового компаратора 39-1, на второй вход которого подается код размера строба с сумматора 40-1. На выходе цифрового компаратора 39-1 (см. фиг. 6, е) формируется импульс строчного строба. Время появления середины строчного импульса строба по координате Х относительно начала строчной развертки пропорционально записанной в реверсивный счетчик 38-1 координате Х, а его длительность определяется кодом размера строба, приходящего с сумматора 40-1.
Код размера строба определяется суммой следующих кодов: кода начального размера строба, приходящего с переключателя 41-1; кода размера изображения объекта вдоль строки, приходящего с блока 12 измерения размеров объекта; кода цифрового интегратора, образованного блоком 44 и регистром 43. На вход блока 46 поступает код модуля вектора скорости, полученного в блоке 45.
Работа блока 13 в режиме поиска 2 следующая.
При потере объекта в блок 13 формирования строба должен приходить прежний код размера объекта по координате Х и код вектора скорости. В режиме слежения регистр 43 обнуляется, интегрирование кода модуля вектора скорости запрещается. При потере объекта начинается интегрирование с частотой кадровых синхроимпульсов и как следствие начинается расширение размера строба по координате Х от кадра к кадру до захвата объекта следящей системой. При сигнале "Режим", равном 1, регистр 43 обнуляется и размер строба уменьшается до размера, определяемого начальным размером строба и размером объекта.
Реверсивный счетчик 38-1 имеет информационный вход 75 (76), на который подается N-разрядный двоичный код координаты Х; вход синхронизации, на который в канале 36 подается тактовая частота fт = 10 МГц, а в канале 37 - частота строчных синхроимпульсов положительной полярности; вход предварительной записи кода координат в реверсивный счетчик 38-1, поступающего на информационный вход. В канале 36 на вход предварительной записи поступают строчные синхроимпульсы отрицательной полярности, в канале 37 на вход предварительной записи поступают кадровые синхроимпульсы отрицательной полярности, на выходе переполнения (см. фиг. 6, г) появляется импульс положительной полярности в момент времени, когда текущий код реверсивного счетчика 38-1 считывается до нуля и выход N-разрядного текущего кода реверсивного счетчика 38-1.
При поступлении на вход предварительной записи импульсов с ГТИ 42 (см. фиг. 6, а) происходит запись координат в реверсивный счетчик 38-1 или их начальная предустановка. По окончании этих импульсов начинается считывание записанного кода в канале 36 тактовой частоты 10 МГц, непрерывно поступающей на вход синхронизации, в канале 37 строчными синхроимпуль- сами положительной полярности. При считывании кода до нуля на выходе переполнения реверсивного счетчика 38-1 появится положительный импульс, который самореверсирует реверсивный счетчик 38-1 по внутренним связям, и счетчик начинает работать в режиме суммирования синхроимпульсов (fт = 10 МГц в канале 36, ССИ - в канале 37). Координаты объекта в режиме слежения поступают в блок 14 измерения скорости и направления. Блок 14 (см. фиг. 7) может быть синтезирован по математической зависимости для определения скорости объекта Vi в i-м кадре
Vi=  , где Ki - координаты объекта в i-м кадре;
, где Ki - координаты объекта в i-м кадре;
Ki-1 - координаты объекта в (i-1)-м кадре;
Δt - временной интервал между i-м и i-1-м кадром.
Вычисление вектора скорости осуществляется по алгоритму
Ki-1 > Ki = +Vi, Ki-1 < Ki = -Vi.
Вычисленное значение вектора скорости V формируется на выходе вычитателя 53. В режиме слежения через открытый сигналом (см. фиг. 2, г) блока 10 управления (выход 76) ключ 54 и элемент ИЛИ 57 код  поступает на выход блока 14. При переходе устройства в режим поиска 2 сигналом блока 10 управления (выход 73) закрывается ключ 55, в элементе 52 памяти фиксируется последнее значение кода
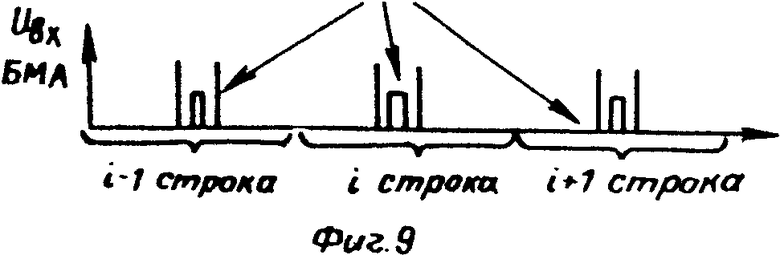
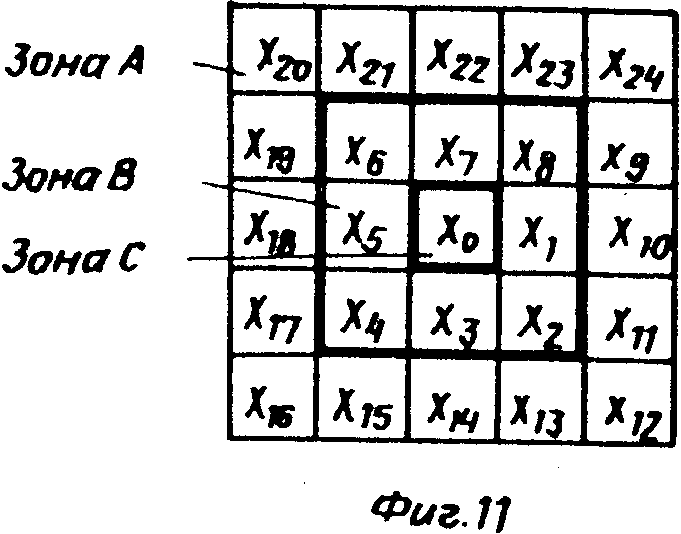
поступает на выход блока 14. При переходе устройства в режим поиска 2 сигналом блока 10 управления (выход 73) закрывается ключ 55, в элементе 52 памяти фиксируется последнее значение кода  , который через открытый ключ 56 поступает через элемент ИЛИ 57 на выход блока 14. Во время выполнения режима поиска 2 этот запомненный код используется для формирования расширяющего по мере увеличения времени строба поиска в соответствии с запомненными значениями величины скорости объекта и направления его движения. Автоматический поиск объекта ведется по отличию искомого объекта от ложного объекта по размерам с помощью блока 7 многоэлементной апертуры (см. фиг. 8). Размерная селекция осуществляется за счет учета межэлементной и межстрочной корреляции сигнала. Многоэлементная апертура формируется с помощью блока 59 строчных задержек и блока 60 элементных задержек из видеосигнала. В блок 65 логической обработки поступает одновременно 25 логических сигналов. В логическом блоке 65 происходит логическое сравнение сигналов апертуры, для удобства объединенных в зоны А, В, С. На основании этого сравнения выносится решение о размере и осуществляется селекция. На фиг. 9 показано формирование сигнала многоэлементной апертуры при попадании в ее поле зрения объекта, расположенного на трех строках в фиксированный момент времени. Для пояснения работы логического блока 65 приведен алгоритм обработки (см. фиг. 10 и 11); если А = 1, а В = 0, объект "меньше"; если А, В = 1, а С = 0, объект "наш"; если А, В, С = 1, объект "больше".
, который через открытый ключ 56 поступает через элемент ИЛИ 57 на выход блока 14. Во время выполнения режима поиска 2 этот запомненный код используется для формирования расширяющего по мере увеличения времени строба поиска в соответствии с запомненными значениями величины скорости объекта и направления его движения. Автоматический поиск объекта ведется по отличию искомого объекта от ложного объекта по размерам с помощью блока 7 многоэлементной апертуры (см. фиг. 8). Размерная селекция осуществляется за счет учета межэлементной и межстрочной корреляции сигнала. Многоэлементная апертура формируется с помощью блока 59 строчных задержек и блока 60 элементных задержек из видеосигнала. В блок 65 логической обработки поступает одновременно 25 логических сигналов. В логическом блоке 65 происходит логическое сравнение сигналов апертуры, для удобства объединенных в зоны А, В, С. На основании этого сравнения выносится решение о размере и осуществляется селекция. На фиг. 9 показано формирование сигнала многоэлементной апертуры при попадании в ее поле зрения объекта, расположенного на трех строках в фиксированный момент времени. Для пояснения работы логического блока 65 приведен алгоритм обработки (см. фиг. 10 и 11); если А = 1, а В = 0, объект "меньше"; если А, В = 1, а С = 0, объект "наш"; если А, В, С = 1, объект "больше".
С помощью данной схемы реализуется селекция по размеру объектов, размеры которых составляют 1-3 элемента дискретизации по строке и кадру.
При изменении размера объекта наблюдения из блока 12 в блок 61 поступает код размера объекта, на основании кода размера формируется интервал дискретизации, определяющий размеры зоны А, В, С.
Автоматический поиск осуществляется следующим образом: сигнал ТВ датчика 1 поступает в блок 2 межкадровой разности, в котором происходит выделение сигнала подвижных объектов. Если объект точечный, на выходе блока 2 сигнал тоже точечный, если объект протяженный, на выходе блока 2 будет происходить выделение контуров подвижных объектов, а неподвижный фон будет подавляться. С выхода блока 2 видеосигнал поступает на первый пороговый блок 3, а затем на блок 4 формирования импульсов объекта, на выходе которого формируется двухуровневый логический сигнал. Уровень порога первого порогового блока 3 устанавливается на основании учета скорости движения объекта, измеренной в блоке 4, так как сигнал блока 2 зависит от скорости движения объекта. Таким образом, управление порогом первого порогового блока 3 позволяет в режиме поиска 2 после срыва слежения учитывать дополнительный параметр - скорость, и отфильтровать сигналы ложных объектов, имеющих скорость, отличную от скорости объекта.
Кроме того, блок 10 управления имеет второй выход 77 (см. фиг. 2в).
На фиг. 12 показаны выход ТВ датчика 1 (см. фиг. 12, а), выход блока 2 (см. фиг. 12, б), выход первого порогового блока 3 (см. фиг. 12, в, г), выход блока 4 (см. фиг. 12, д), выход сглаживающего фильтра 5 (см. фиг. 12, е), выход блока 7 (см. фиг. 12, ж).
На фиг. 1 не показан блок снихронизации, который соединен со всеми блоками и обеспечивает их синхронизацию. При раскрытии отдельных блоков в их состав, там, где это требуется по описанию работы, вводятся генераторы тактовых импульсов, с помощью которых вырабатываются все необходимые для этих блоков служебные ТВ сигналы. Все ГТИ работают синхронно. (56) Авторское свидетельство СССР N 759034, кл. H 04 N 7/18, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1988 |
|
SU1574152A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1984 |
|
SU1238702A1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ИЗОБРАЖЕНИЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 1989 |
|
SU1657043A1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ КООРДИНАТ | 1984 |
|
SU1250151A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1986 |
|
SU1412577A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1985 |
|
SU1454225A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ТОЧЕЧНЫХ ОБЪЕКТОВ | 1989 |
|
SU1623537A1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1983 |
|
SU1141990A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |