Изобретение относится к неразру- шакщему контролю и может быть иСполь- зовано для обнаружения дефектов в тонкостенных изделиях.
Целью изобретения является расширение технологических возможностей и повышение точности определения местоположения дефекта за счет обеспечения возможности контроля как продольной, так и поперечной координаты дефекта.
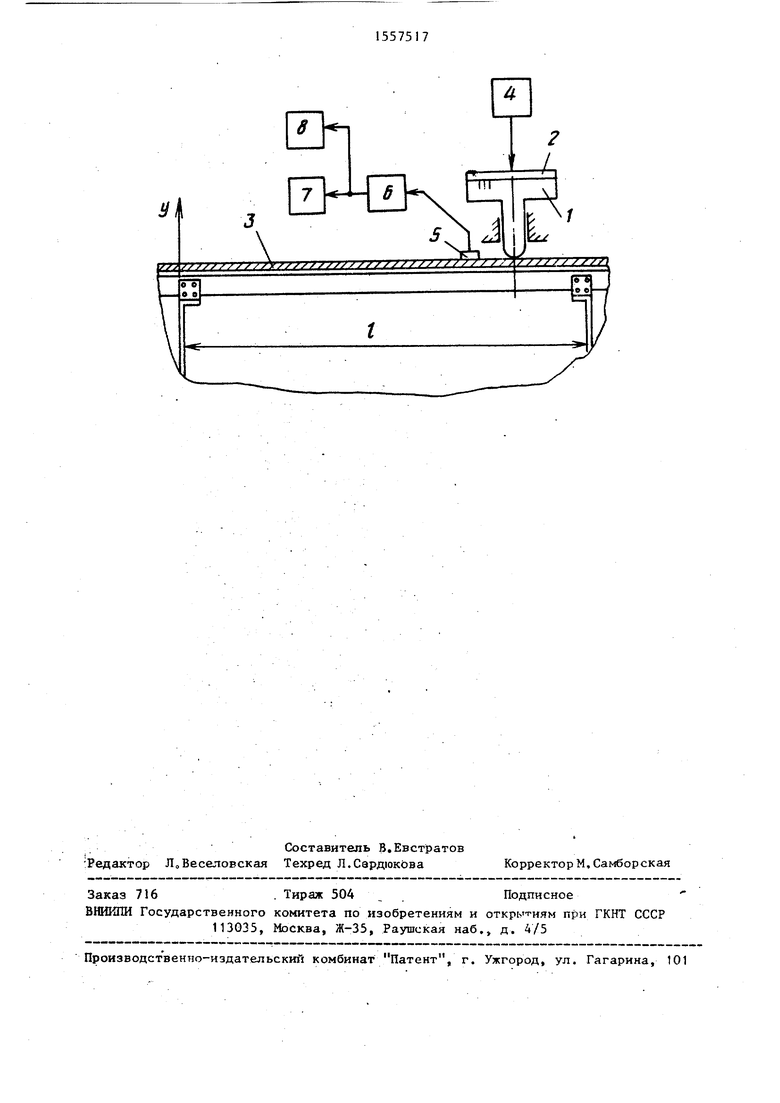
На чертехе представлена схема устройства, реализующего способ виброакустического контроля тонкостенных изделий.
Устройство состоит из присоединенной массы i со встроенным вибровозбудителем 2, устанавливаемых на контролируемом изделии 3. Вибровозбудитель 2 подключен к блоку 4 управления. Измерительный преобразователь 5 подключен к усилителю 6, выход которого подключен к входам частотомера 7 и блоку 8 измерения шума и вибраций.
Способ виброакустического контроля тонкостенных изделий реализуется следующим образом,
Локальные зоны контролируемого изделия 3 последовательно нагружают путем размещения на их. поверхности понсоадиненной массы 1 и фиксируют координату х/1 ее приложения. С помощью блока 4 управления последовательно устанавливают два значения Р, и Р2 амплитуды внешнего гармонического воздействия, генерируемого вибровозбудителем 2,При каждом положении массы возбуждают вынужденные колебания нагруженной зоны из- делит (сначала при Р - Р4 , затем при
«
ЈП
Р F,), Величину } при этом выбирают несколько меньшей (или равной), а величину Р, наоборот, несколько большей порогового значения РО. Такой выбор амплитуд вынуждающего воздействия обеспечивает линейный режим движения присоединенной массы при Р Р, и гарантирует nepexefa к существенно нелинейным колебаниям при Р Р„ . Единственным фактором, ограничивающим выбор минимального значения Р, , является требование превышения (хотя бы на порядок) амплитудой полезных резонансных колебаний при- соединенной массы уровня естественных помех, всегда имеющихся в реальной системе. Максимальное же значение Р4 в принципе может совпадать с пороговым возбуждением РО. Нижнее предельное значение выбирается из . условия обеспечения максимальной чувствительности контроля, а максимально « допустимое значение Р2 ограничивается лишь условиями динамической прочности конструкции.
Значения амплитуд воздействующих
ил Р, и Р. выбирают из соотношений:
Р, (3-8) j lV
P2 ()-icf4-- -- .
Затем принимают колебания нагруженной зоны изделия с помощью измерительного преобразователя 5, сигнал с которого через усилитель 6 поступает на частотомер 7 и блок 8 измерения шума и вибрацийо
Регулируя частоту СО внешнего гармонического воздействия (с помощью блока 4 управления), настраивают систему на первый основной резонанс (сначала при Р Р,, затем при Р PJ) и определяют два значения резонансных частот СОр, и Qp2. При
этом о факте настройки системы на резонанс судят по резкому увеличению. виброускорений, замеряемых блоком 8 измерений шума и вибраций; резонансные же значения частот СОр, и О}р2 регистрируют частотомером 6.
По экстремуму разности резонансных частот &GD. С0рг -Up, от местоположения нагруженной зоны определяют дефектное сечение изделия, а по виду этого экстремума (максимум или минимум) - расположение повреждения в дефектном сечении (снизу или сверху).
Формула изобретения
0 5 0 5
0
5
до
Способ виброакустического контроля тонкостенных изделий, заключающийся в том, что последовательно нагружают локальные зоны контролируемого участка изделия присоединенной массой, возбуждают гармонической силой упругие колебания в нагруженных зонах, измеряют параметры упругих колебаний при каждом расположении присоединенной массы и по зависимости параметров упругих колебаний от расположения присоединенной массы судят о наличии дефекта и его местоположении, отличающийся тем, что, с целью расширения технологических возможностей контроля и повышения точности определения местоположения дефекта, гармоническое воздействие осуществляют при двух фиксированных значениях амплитуд Р, и Р2, измеряют значения резонансных частот СОр, и сЈрг при этих значения амплитуд, по разности ДСОл GJp - -Up, от местоположения присоединенной массы определяют местоположение дефекта, а значение амплитуд выбирают из условий
(3-8) - 0 4Е1т/1гтс
и Pfi - (19-40) МО Е1т/12тс,
где EI, 1, т - соответственно из- гибная жесткость, длина и масса контролируемого участка изделия;
т.
- присоединенная масса.
Hi
ТП

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ виброакустического контроля изделий | 1988 |
|
SU1569698A1 |
| Способ виброакустического контроля тонкостенных конструкций | 1986 |
|
SU1330547A1 |
| Способ виброакустического контроля конструкций | 1988 |
|
SU1534390A1 |
| СПОСОБ ВИБРОАКУСТИЧЕСКОГО КОНТРОЛЯ ОДНООСНЫХ КОНСТРУКЦИЙ | 1999 |
|
RU2170426C2 |
| Способ вибродиагностики элементов конструкций | 1987 |
|
SU1732256A1 |
| Способ виброакустического контроля тонкостенных конструкций | 1984 |
|
SU1226303A1 |
| Способ акустического контроля тонкостенных изделий | 1982 |
|
SU1024829A1 |
| СПОСОБ АКУСТИЧЕСКОГО КОНТРОЛЯ ТОНКОСТЕННЫХ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2117940C1 |
| Способ виброакустического контроля конструкций | 1986 |
|
SU1396047A1 |
| УСТРОЙСТВО ДЛЯ ВИБРОАКУСТИЧЕСКОГО КОНТРОЛЯ ОДНООСНЫХ КОНСТРУКЦИЙ | 2003 |
|
RU2248567C1 |
Изобретение относится к неразрушающему контролю и может быть использовано для обнаружения дефектов в тонкостенных изделиях. Целью изобретения является расширение технологических возможностей и повышение точности определения местоположения дефекта за счет обеспечения возможности контроля как продольной, так и поперечной координаты дефекта. При контроле измеряют резонансные частоты колебательной системы при двух значениях амплитуды возбуждающей гармонической силы и по зависимости разности измеренных значений определяют как продольную, так и поперечную координату дефекта. 1 ил.
| Способ виброакустического контроля тонкостенных конструкций | 1984 |
|
SU1226303A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
