5Л
QI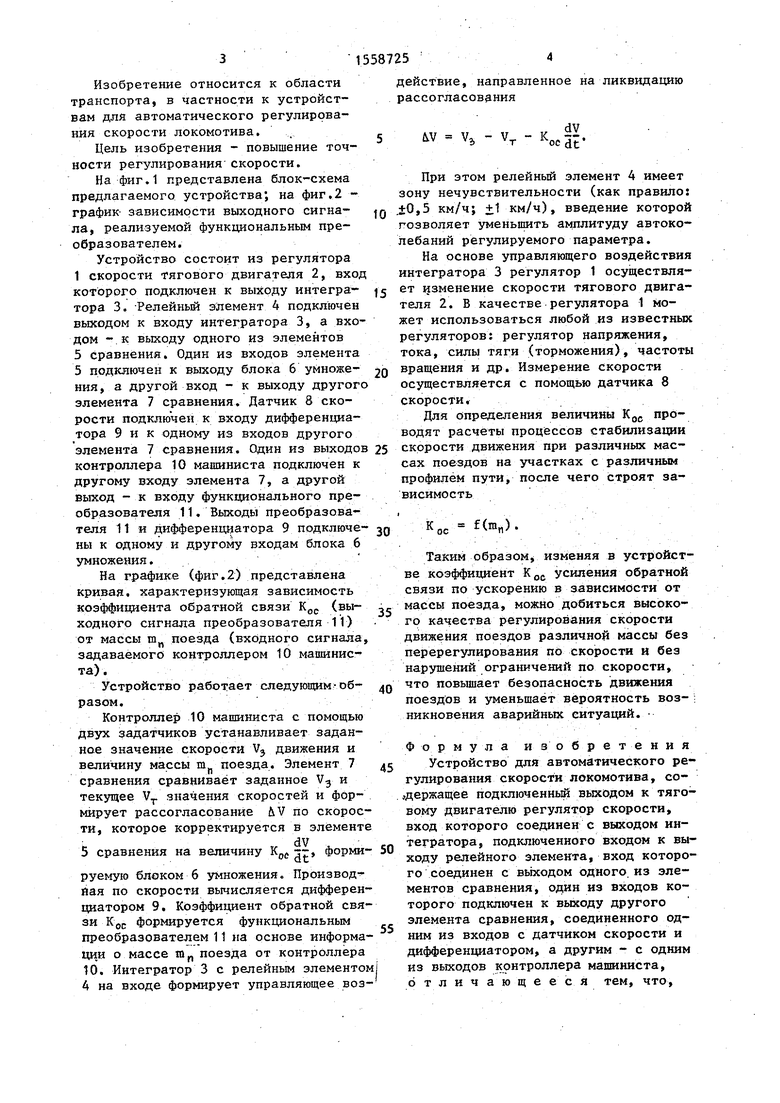
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РЕКУПЕРАТИВНОГО ТОРМОЗА ЭЛЕКТРОВОЗА ПОСТОЯННОГО ТОКА | 2012 |
|
RU2514961C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЯГОВОГО ПОДВИЖНОГО СОСТАВА | 2000 |
|
RU2202481C2 |
| Способ регулирования электрической передачи тепловоза | 2020 |
|
RU2729865C1 |
| УСТРОЙСТВО НЕПРЕРЫВНОГО ТЕМПЕРАТУРНОГО КОНТРОЛЯ И АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАГРУЗКИ СИЛОВОГО ЭЛЕКТРООБОРУДОВАНИЯ ЭЛЕКТРОВОЗА | 2011 |
|
RU2478046C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗОВ | 2000 |
|
RU2174919C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2010 |
|
RU2423251C1 |
| Устройство для регулирования тягового генератора тепловоза | 1988 |
|
SU1558724A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2016 |
|
RU2616111C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2015 |
|
RU2588400C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 1998 |
|
RU2130389C1 |
Изобретение относится к транспорту, в частности к устройствам для автоматического регулирования скорости локомотива и направлено на повышение точности регулирования скорости. Контроллером 10 машиниста задается заданная скорость движения. Регулятор 1 скорости поддерживает заданную скорость тягового электродвигателя 2 по результату сравнения в элементе 7 сравнения заданной скорости и фактической скорости, измеряемой датчиком 8. Повышение точности достигается использованием дополнительного элемента сравнения 5, который корректирует сигнал с элемента 7 от блока 6 умножения на величину, пропорциональную ускорению от дифференциатора 9 и коэффициента, зависящего от массы поезда. Величина массы поезда задается с контроллера 10 машиниста и преобразовывается функциональным преобразователем 11 в коэффициент, зависимость которого от массы получена расчетным путем. 2 ил.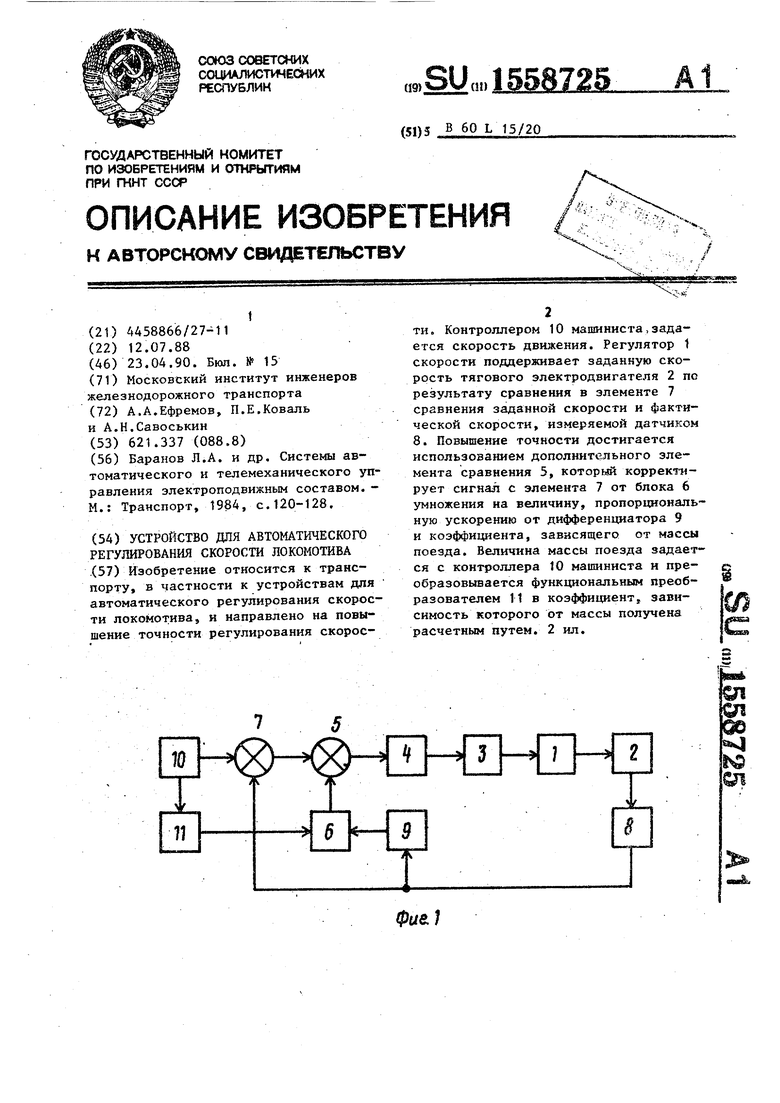
10
11
3
2
Ю
8
I
Фие.1
Изобретение относится к области транспорта, в частности к устройствам для автоматического регулирования скорости локомотива.
Цель изобретения - повышение точности регулирования скорости.
На фиг.1 представлена блок-схема предлагаемого устройства; на фиг.2 - график зависимости выходного сигна- ла, реализуемой функциональным преобразователем.
Устройство состоит из регулятора 1 скорости тягового двигателя 2, вход которого подключен к выходу интегра- тора 3. Релейный элемент 4 подключен выходом к входу интегратора 3, а входом - к выходу одного из элементов 5 сравнения. Один из входов элемента 5 подключен к выходу блока 6 умноже- ния, а другой вход - к выходу другого элемента 7 сравнения. Датчик 8 скорости подключен к входу дифференциатора 9 и к одному из входов другого элемента 7 сравнения. Один из выходов контроллера 10 машиниста подключен к другому входу элемента 7, а другой выход - к входу функционального преобразователя 11. Выходы преобразователя 11 и дифференциатора 9 подключе- ны к одному и другому входам блока 6 умножения.
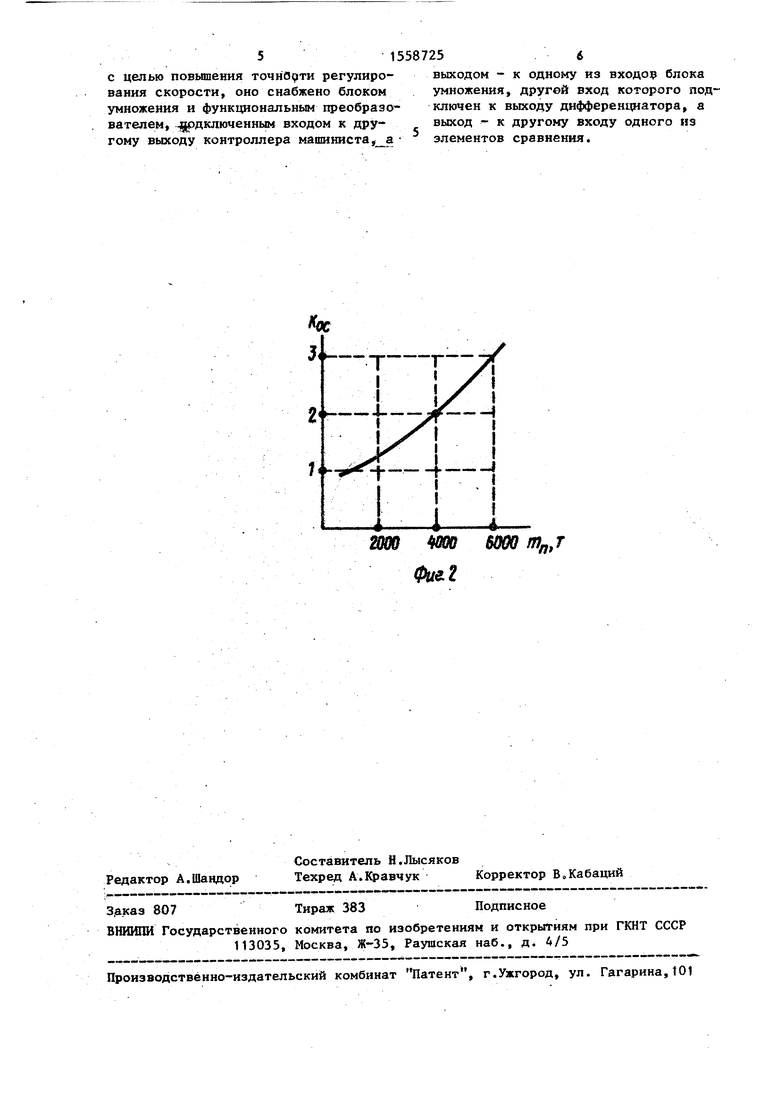
йа графике (фиг.2) представлена кривая, характеризующая зависимость коэффициента обратной связи Кос (вы- ходного сигнала преобразователя 11) от массы mn поезда (входного сигнала, задаваемого контроллером 10 машиниста).
Устройство работает следующимоб- разом.
Контроллер 10 машиниста с помощью двух задатчиков устанавливает заданное значение скорости Vj движения и величину массы mn поезда. Элемент 7 сравнения сравнивает заданное Vj и текущее VT значения скоростей и формирует рассогласование &V по скорости, которое корректируется в элементе
5 сравнения на величину Кос т-, форми-
руемую блоком 6 умножения. Производная по скорости вычисляется дифференциатором 9, Коэффициент обратной связи Кос формируется функциональным преобразователем 11 на основе информации о массе tnn поезда от контроллера 10. Интегратор 3 с релейным элементом 4 на входе формирует управляющее воз
действие, направленное на ликвидацию рассогласования
ю - vs - VT - кос.
При этом релейный элемент 4 имеет зону нечувствительности (как правило: .±0,5 км/ч; +1 км/ч), введение которой позволяет уменьшить амплитуду автоколебаний регулируемого параметра.
На основе управляющего воздействия интегратора 3 регулятор 1 осуществляет изменение скорости тягового двигателя 2. В качестве регулятора 1 может использоваться любой из известных регуляторов; регулятор напряжения, тока, силы тяги (торможения), частоты вращения и др. Измерение скорости осуществляется с помощью датчика 8 скорости.
Для определения величины Кос проводят расчеты процессов стабилизации скорости движения при различных массах поездов на участках с различным профилем пути, после чего строят зависимость
К
ос
f Ю.
Таким образом, изменяя в устройстве коэффициент Кос усиления обратной связи по ускорению в зависимости от массы поезда, можно добиться высокого качества регулирования скорости движения поездов различной массы без перерегулирования по скорости и без нарушений ограничений по скорости, что повышает безопасность движения поездов и уменьшает вероятность возникновения аварийных ситуаций.
Формула изобретения Устройство для автоматического регулирования скорости локомотива, содержащее подключенный выходом к тяговому двигателю регулятор скорости, вход которого соединен с выходом интегратора, подключенного входом к выходу релейного элемента, вход которого соединен с выходом одного из элементов сравнения, один из входов которого подключен к выходу другого элемента сравнения, соединенного одним из входов с датчиком скорости и дифференциатором, а другим - с одним из выходов контроллера машиниста, отличающееся тем, что,
с целью повышения точнбрти регулирования скорости, оно снабжено блоком умножения и функциональным преобразователем, подключенным входом к другому выходу контроллера машиниста, а
выходом - к одному из входов блока умножения, другой вход которого подключен к выходу дифференциатора, а выход - к другому входу одного из элементов сравнения.
«
Фи&2
6000 т„,т
| Баранов Л.А | |||
| и др | |||
| Системы автоматического и телемеханического управления электроподвижным составом | |||
| - М.: Транспорт, 1984, с.120-128. |
