Изобретение относится к области транспорта, в частности к устройствам для автоматического регулирования скорости движения тягового подвижного состава (ТПС).
Известно устройство для регулирования скорости электровозов ВЛ85 и ВЛ65, состоящее из задатчика скорости, задатчика тока или силы тяги (торможения), элемента сравнения, регулятора скорости, элемента ИЛИ-min, задатчика интенсивности, автоматизированного тягового электропривода (объекта регулирования) и чувствительного элемента. Недостатками известного устройства являются резкое спадание тока двигателей при переходе от режима разгона (торможения) к режиму стабилизации скорости, вызывающее значительные продольные динамические силы. Кроме того, выявлено, что во время работы регулятора скорости в режиме стабилизации отклонение величины фактической скорости движения от величины заданной скорости должно достигнуть 10 км/ч, после чего обратная связь по скорости начинает воздействовать на восстановление заданного значения скорости.
Известно устройство для регулирования скорости локомотива, содержащее контроллер машиниста с задатчиками скорости и параметров поезда, функциональный преобразователь, два элемента сравнения, релейный элемент, дифференциатор, интегратор, регулятор скорости, чувствительный элемент, объект регулирования (SU, авторское свидетельство 1558725, кл. В 60 L 15/20, 1988).
Недостатком этого устройства является то, что при его использовании не выполняется ограничение по плавности хода в переходных режимах и нельзя изменять заданное ускорение (замедление).
Сущность заявляемого объекта состоит в том, что типовое устройство дополнительно снабжено задатчиком интенсивности, реализующим передаточную функцию апериодического звена второго порядка, и блоком задания ускорения, причем первый выход задатчика интенсивности соединен с одним из выходов элемента сравнения, а второй выход подключен к регулятору скорости и входы - к датчику скорости, задатчику скорости, блоку задания ускорения, реверсивно-режимной рукоятке контроллера машиниста и регулятору скорости.
Техническим результатом является повышение качества регулирования скорости для обеспечения заданного уровня ускорения aз в режиме тяги или замедления в режиме торможения для выбранного типа тягового подвижного состава (локомотив, электропоезд, вагон метро, трамвай и т.п.) с выполнением ограничения по плавности хода в переходном режиме по критерию
При ухудшении условий сцепления колес с рельсами (дождь, гололед и т.п.) можно уменьшить заданную величину ускорения вручную с помощью ЗУ или автоматически по сигналам от датчиков защиты от боксования (юза) или датчиков загрузки вагонов пассажирами, обеспечивая реализацию возможных сил тяги (торможения) при этих условиях,
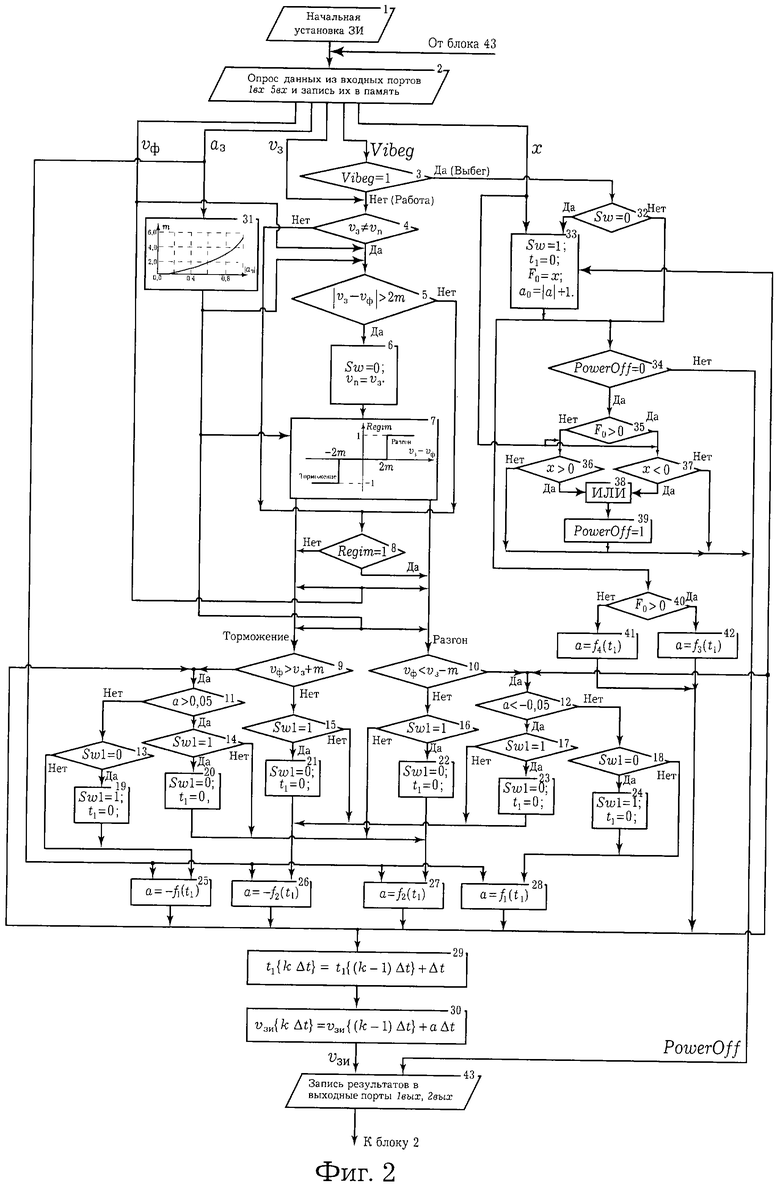
На фиг. 1 представлена блок-схема предлагаемого устройства; на фиг.2 - блок-схема алгоритма работы задатчика интенсивности; на фиг.3 - блок-схема алгоритма работы регулятора скорости; на фиг.4 - графики, поясняющие работу задатчика интенсивности.
Устройство (см. фиг.1) содержит регулятор скорости (РС) движения 6 ТПС 8, первый вход которого подключен к выходу элемента сравнения 5, а второй вход - к первому выходу задатчика интенсивности (ЗИ) 1вых. На этот вход с ЗИ поступает сигнал PowerOff, выключающий регулятор скорости при переходе системы в режим выбега.
С выходов регулятора скорости 6 на входы исполнительного элемента 7 подаются три сигнала: с выхода 1вых на вход 1вх - заданное значение силы тяги х, с выхода 2вых на вход 2вх - команда для исполнительного элемента на переключение в режим тяги Т, с выхода 3вых на вход 3вх - команда для исполнительного элемента на переключение в режим торможения В. Исполнительный элемент 7 преобразует заданное значение силы тяги х с выхода 1вых регулятора скорости в силу, воздействующую на ТПС 8. Кроме того, величина х поступает на вход 1вх ЗИ.
Выход датчика скорости 9 подключен ко второму входу 2вх задатчика интенсивности 4 и одному из входов элемента сравнения 5. Другой вход элемента сравнения 5 подключен ко второму выходу 2вых задатчика интенсивности 4. Третий вход 3вх задатчика интенсивности подключен к выходу задатчика скорости 2 KM, четвертый вход 4вх - к выходу блока изменения заданного ускорения 10, один вход которого подключен к выходу задатчика ускорения 1, а другой вход - к датчикам боксования (юза) и к датчикам загрузки вагонов, пятый вход 5вх - к реверсивно-режимной рукоятке 3.
Задатчик интенсивности (фиг.2) работает следующим образом.
В момент времени, следующий непосредственно за включением системы, в блоке 1 происходит присвоение исходных параметров: vз=0 (заданное значение скорости), аз= 0, Vibeg= 1 (признак включения режима выбега), Regim=1 (режимная переменная разгон-торможение), vn=0 (контрольная переменная, необходимая для контроля за изменением величины заданной скорости), Sw=0 (контрольная переменная, необходима для контроля за переходом системы в режим выбега), Sw1= 0 (контрольная переменная, необходима для контроля за изменением ускорения (набор-сброс)), t1=0 (внутреннее время ЗИ).
Машинист с помощью реверсивно-режимной рукоятки 3 устанавливает режим движения Vibeg - выбег или работа, с помощью задатчика ускорения (ЗУ) - величину ускорение aкм, с помощью задатчика скорости (ЗС) - величину заданной скорости vз. Величина заданного ускорения аз образуется путем корректировки в блоке 10 (см. фиг.1) величины с выхода задатчика ускорения 1 KM акм сигналом асоr от датчиков боксования (юза) и датчиков загрузки вагонов. Опрос сигналов vф, аз, vз, Vibeg, х со входных портов и запись в память ЗИ происходят в блоке 2.
В зависимости от значения величины Vibeg, поступающей на вход блока 3, осуществляется выбор режима движения локомотива - разгон (торможение) или выбег. В случае невыполнения условия блока 3 управление передается блоку 4, в котором осуществляется контроль за изменениями величины заданной скорости vз. При ее изменении (удовлетворении условия блока 4) в блоке 5 проверяется соотношение величин заданной vз и фактической vф скоростей, а также величины m, определяемой в блоке 31 и зависящей от величины заданного ускорения aз. В случае неудовлетворения условий блоков 4 и 5 изменения режима движения (разгон - торможение) не происходит и управление передается блоку 8, из которого управление передается блокам 9 и 10 в зависимости от текущего режима движения (разгон - торможение).
Если условие блока 5 выполнено, то управление передается блоку 6, в котором происходит переприсвоение величин vn=vз и Sw=0. Таким образом, после каждого изменения величины заданной скорости vз выполнение операций блока 6 осуществляется только один раз, что обеспечивается внутренней переменной vn ЗИ.
Затем в работу включается блок 7, представляющий собой двухпозиционный элемент с зоной нечувствительности, осуществляющий выбор режима движения (разгон - торможение). Далее, в зависимости от выбранного режима движения (разгон - торможение) управление передается блокам 10 и 9 соответственно, в которых осуществляется проверка соотношения величин vф, vз и m. В случае выполнения условий блоков 9 и 10 управление передается блокам 11 и 12, в случае невыполнения - блокам 15 и 16. Проверка условий блоков 11 (торможение) и 12 (разгон) необходима в случаях, если произошло увеличение (уменьшение) величины заданной скорости в процессе торможения (разгона), причем величина фактической скорости при этом оказалась больше (меньше) нового значения заданной скорости.
Ветвь, состоящая из блоков 18, 24, 28, обеспечивает набор ускорения в режиме разгона, ветвь из блоков 17, 23, 26 обеспечивает уменьшение замедления при переходе из режима торможения в режим разгона, ветвь из блоков 16, 22, 27 обеспечивает уменьшение ускорения при приближении величины vф фактической скорости к величине vз заданной скорости при разгоне. Ветвь, состоящая из блоков 13, 19, 25, обеспечивает увеличение замедления в режиме торможения, ветвь из блоков 14, 20, 27 обеспечивает уменьшение ускорения при переходе от разгона к торможению, ветвь из блоков 15, 21, 26 обеспечивает уменьшение замедления при приближении величины vф фактической скорости к величине vз заданной скорости при торможении. В блоках 25, 26, 27, 28 происходит вычисление промежуточной величины заданного ускорения движения локомотива а. При этом функции f1(t1) и f2(t1) соответствуют переходной функции апериодического звена II-го порядка, f1(t1) - увеличению ускорения, f2(t1) - уменьшению ускорения.
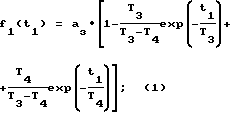
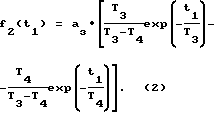
Постоянные времени T3 и Т4 выбираются из условия обеспечения требуемой плавности хода и составляют, например, для электропоездов: Т3=аз•0,8; T4= aз•0,7, и функции f1(t1) и f2(t1) принимают вид:

Номограмма m(|aз|), занесенная в память блока 31, определена следующим образом. Вначале рассчитаны графики изменения aз *(t1)=f1(t1) или aз *(t1)= f2(t1) при различных величинах aз, соответствующих позициям ЗУ - блок 1 (см. фиг.1), например, для 0,5аз, 0,6аз, 0,7аз, 0,8аз, 0,9аз и aз. По этим кривым определено время регулирования tp, как время, в течение которого aз *(t1) достигает значения 0,995аз *(∞). Далее вычислены величины m как
Полученные величины m для различных a3 в соответствии с позициями ЗУ занесены в память блока 31.
В случае выполнения условия блока 3 система переходит в режим выбега и управление передается блоку 32. При выполнении условия блока 32 в работу вступает блок 33, в котором происходит обнуление внутреннего счетчика времени ЗИ, переприсвоение величин Sw=1 и F0=x (x - величина с выхода регулятора скорости (см. фиг.1)), а также определение величины а0, необходимой для работы блоков 41 и 42 (см. ниже). В дальнейшем значение F0 используется для выбора способа изменения силы тяги (торможения) при переходе в режим выбега.
С блоков 32 и 33 управление передается блокам 34 и 40.
В блоке 34 проверяется, был ли выработан ранее управляющий сигнал PowerOff= 1, выключающий регулятор скорости 3 (см. фиг.1). В случае выполнения условия блока 34 проверяется условие блока 35. В зависимости от результата работы блока 35 управление передается блоку 36 или 37. Блок 38 реализует функцию логического сложения, обеспечивая на своем выходе результат "Да", если хотя бы один из входных сигналов (с выходов блоков 36 и 37) также имеет значение "Да". Таким образом, при выполнении условий блока 36 или 37 вырабатывается управляющий сигнал PowerOff=1, который записывается в выходной порт 2вых ЗИ (блок 43).
В зависимости от результатов проверки условия блока 40 в работу вступают блоки 41 или 42, в которых происходит вычисление промежуточной величины заданного ускорения движения локомотива а. При этом функции f3(t1) и f4(t1), также соответствующие переходной функции апериодического звена II-го порядка, определяют f3(t1) - изменение ускорения при переходе на выбег, если сила тяги (торможения) была больше нуля, а f4(t1) - то же, если сила тяги (торможения) была меньше нуля.


или для принятых Т3=а3•0,8; Т4=а3•0,7

В блоке 29 осуществляется счет внутреннего времени задатчика интенсивности. В блоке 30 задатчика интенсивности происходит интегрирование величины а, поступающей с выходов блоков 25, 26, 27, 28, 41, 42. Результатом этого интегрирования является величина vзи, которая записывается в выходной порт 1вых.
С выхода задатчика интенсивности (см. фиг.1) величина vзи поступает на один из входов элемента сравнения 5, который вычисляет рассогласование Δv между величиной vзи и величиной vф, поступающей на второй вход элемента сравнения 5 с выхода датчика скорости 9. Величина Δv с выхода элемента сравнения поступает на вход регулятора скорости 6, который формирует управляющее воздействие x на исполнительный элемент 7, направленное на ликвидацию рассогласования Δv. В качестве регулятора скорости принят пропорционально-интегрирующий регулятор с законом
Регулятор скорости (фиг.3) работает следующим образом. В блоке 1 происходит опрос сигналов Δv и PowerOff и запись их в память PC. В блоке 2 проверяется условие перехода системы в режим выбега. В случае выполнения условия блока 2 (система находится в режиме тяги или торможения) управление передается блоку 3, в котором реализуются пропорциональная (x1) и интегрирующая (x2) части регулятора. В случае перехода в режим выбега (выполнения условия блока 2) управление передается блоку 4, в котором происходит обнуление величин x1 и x2. С блоков 3 или 4 управление передается блоку 5. При выполнении условия блока 5 (система находится в режиме тяги) управление передается блоку 6, в котором происходит вычисление управляющего воздействия на исполнительный элемент x, а также формируются сигналы Т=1 и В=0 (совокупность команд, определяющих режим работы исполнительного элемента - тяга). Если условие блока 5 не выполняется (система находится в режиме торможения) управление передается блоку 7, в котором также происходит вычисление управляющего воздействия х и формируются сигналы Т=0 и В=1 (совокупность команд, определяющих режим работы исполнительного элемента - торможение). В блоке 8 происходит запись сигналов x, Т, В в выходные порты PC.
При этом параметры регулятора kpeг=51138,23 и Трег=0,1605 с выбраны так, чтобы обеспечить его максимальное быстродействие. Исполнительный элемент (статический тиристорный преобразователь для режима тяги или пневматический тормоз для режима торможения) преобразует управляющее воздействие с выхода регулятора скорости в силу тяги (торможения) F, воздействующую на ТПС 8.
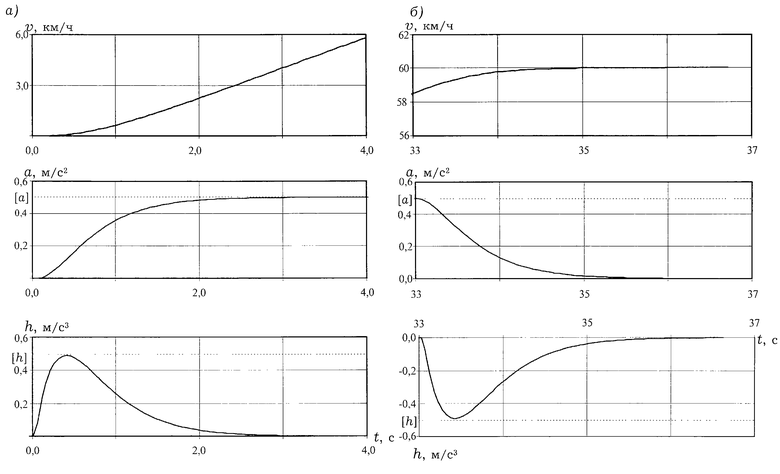
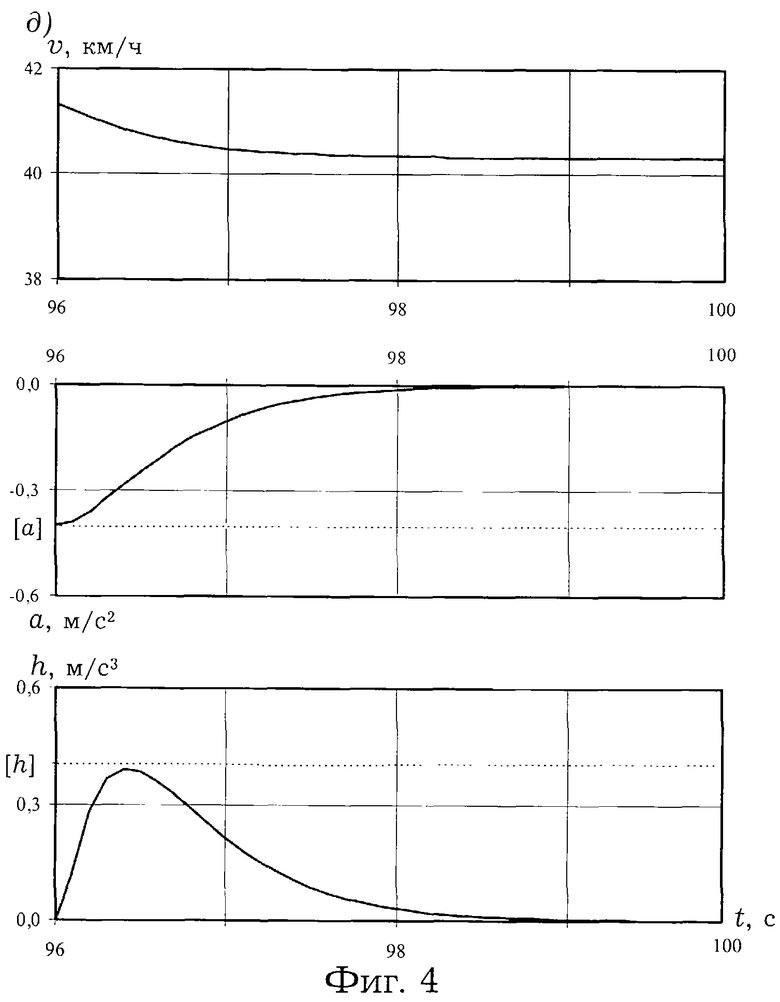
На фиг. 4 (а, б, в, г, д) представлены результаты моделирования работы устройства для автоматического регулирования скорости электропоезда с заданными плавностью хода [h]=±0,5 м/с3 и ускорением а=0,5 м/с3 для режима тяги и а=-0, 4 м/с2 для режима торможения.
На фиг.4а представлены графики скорости v(t), ускорения d(t) и плавности хода h(t) для режима трогания с места, на фиг.4б представлены графики v(t), a(t) и h(t) для режима сброса тяги после разгона и стабилизации скорости, на фиг. 4в представлены графики v(t), a(t) и h(t) для режима набора тяги после стабилизации скорости, на фиг.4г представлены графики v(t), a(t) и h(t) для режима набора тормозной силы после стабилизации скорости, на фиг.4д представлены графики v(t), d(t) и h(t) для режима сброса тормозной силы и стабилизации скорости.
Как видно из представленных графиков, величины ускорения (замедления) и плавности хода не превышают заданных значений.
Описанное устройство представляет собой систему автоматической стабилизации скорости, обеспечивающую качество регулирования вне зависимости от веса поезда и условий движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2399515C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ДЛИННОСОСТАВНОГО ГРУЗОВОГО ПОЕЗДА | 2022 |
|
RU2789231C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОВОЗОМ ОДНОФАЗНО-ПОСТОЯННОГО ТОКА С ТРАНЗИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ ВОЗБУЖДЕНИЯ | 2023 |
|
RU2824412C1 |
| Устройство для управления многодвигательным электроприводом транспортного средства | 1984 |
|
SU1411175A1 |
| Способ автоматического управления током тяговых электродвигателей подвижного состава | 2022 |
|
RU2787135C1 |
| Следящая система с ограниченным углом поворота выходного вала | 1986 |
|
SU1339488A1 |
| Устройство для управления режимами приработки и диагностирования дизеля | 1988 |
|
SU1562727A1 |
| Электропривод с подчиненным регулированием параметров | 1987 |
|
SU1450062A1 |
| Устройство для управления скоростью подвижного состава | 1983 |
|
SU1106698A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ТЕПЛОВОЗА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ | 2016 |
|
RU2616111C1 |


Изобретение относится к области транспорта, в частности к устройствам для автоматического регулирования скорости движения тягового подвижного состава. Устройство содержит воздействующий на локомотив исполнительный элемент, подключенный своим входом к регулятору скорости, первый вход которого подключен к выходу элемента сравнения. Один из входов последнего связан с датчиком скорости. Устройство снабжено задатчиком интенсивности. Первый выход его подключен ко второму входу регулятора скорости, второй выход - к другому входу элемента сравнения. Входы задатчика интенсивности подключены к датчику скорости, задатчику скорости, задатчику ускорения через блок изменения заданного ускорения, реверсивно-режимной рукоятке контроллера машиниста и регулятору скорости. Технический результат - повышение качества регулирования скорости. 4 ил.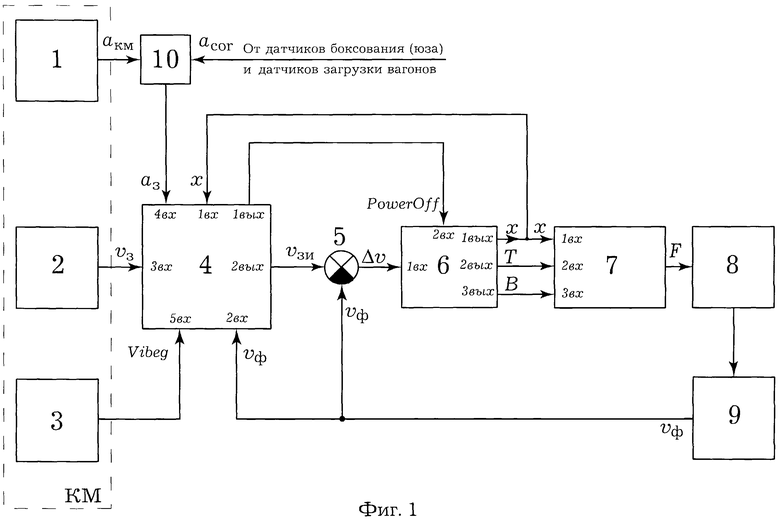
Устройство для автоматического регулирования скорости тягового подвижного состава, содержащее воздействующий на локомотив исполнительный элемент, подключенный своим входом к регулятору скорости, первый вход которого подключен к выходу элемента сравнения, один из входов которого связан с датчиком скорости, отличающееся тем, что оно снабжено задатчиком интенсивности, первый выход которого подключен к второму входу регулятора скорости, второй выход - к другому входу элемента сравнения, входы - к датчику скорости, задатчику скорости, задатчику ускорения через блок изменения заданного ускорения, реверсивно-режимной рукоятке контроллера машиниста и регулятору скорости.
| Устройство для автоматического регулирования скорости локомотива | 1988 |
|
SU1558725A1 |
| US 5117163 A, 26.05.1992 | |||
| ЭЛЕКТРОПРИВОД ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ | 1989 |
|
RU2030827C1 |
| DE 4333281 A1, 30.05.1995 | |||
| JP 6064538 A1, 08.03.1994 | |||
| JP 55077304 A1, 11.06.1980 | |||
| JP 5076107 A1, 26.03.1993 | |||
| US 4401035 A, 30.08.1983. | |||

