Изобретение относится к информационно-измерительной технике и может быть использовано в системах автоматического контроля радиоэлектронных изделий, а также в автоматизированных системах управления технологическими процессами.
Цель изобретения - повышение производительности контроля.
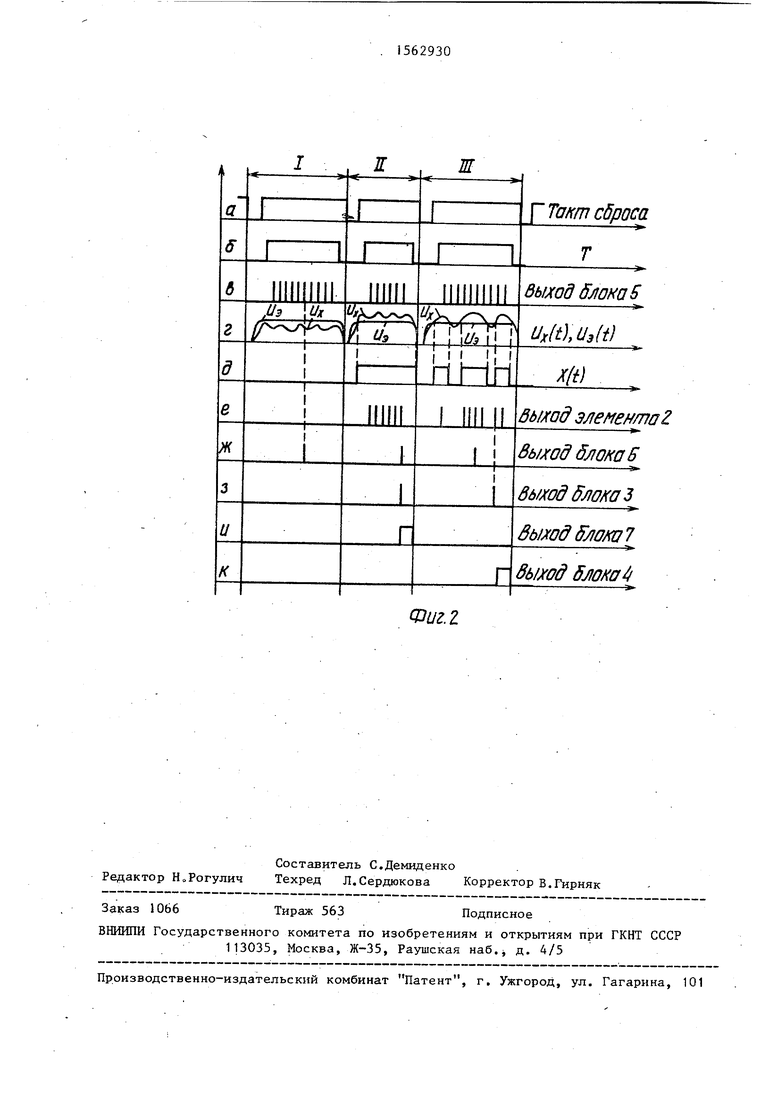
На фиг.1 приведена схема, реализующая предлагаемый способ; на фиг. 2 - диаграмма.
Схема (фиг.1) содержит блок 1 сравнения контролируемой величины с эталоном, селектор 2 высокочастотных импульсов, счетчик 3 подсчета числа селектированных импульсов, блок 4 сигнализации результатов подсчета, генератор 5 высокочастотных импульсов, счетчик 6 подсчета числа сгенерированных импульсов и блок 7 логической оценки результатов контроля.
Формируют логический сигнал x(t) результата сравнения контролируемого
напряжения Ux(t) с эталонным U3(t), который находится в состоянии логического нуля при Ux(t) Ј U9(t) и в состоянии логической 1 при Ux(t)
U3(t), а также переключается из одного состояния в другое при U x(t)«
CiU3(t), причем сравнение Ux(t) с U3(t) безгистерезисноо Для достижения заданной достоверности контроля усредняют сигнал x(t) на интервале времени О, Т. При аналоговом усреднении
ux(o,T) -±s xdt4S -uodt (1)
о t
где U (О,Т) - среднее значение сигнала x(t) за интервал времени О,
0,tJ - та часть интервала времени О,Т, когда сигнал x(t)Uo.
ft,Т - та часть интервала времени О,Т, когда сигнал x(t)U о
(/
U°,Ug - нормированные напряжения сигналов логических нуля и единицы. Из (1) следует, что
1 - Ј 1 т
(2)
При дискретном усреднении сигнала x(t) интервал усреднения О,Т задан в виде известного числа N высокочастотных импульсов периода Т0, т.е. Т х N-T0 Число М импульсов, отселек- тированных сигналов X(t) 1, приближенно соответствует части 0,t интервала усреднения, когда сигнал x(t) 1 - t М Тв.
Соотношение между интервалами времени О,Т и 0,t характеризует среднее значение сигнала x(t), т.е.
Хср(0,Т) М N
(3)
Анализируют состояние сигнала x(t) на начальном отрезке длительностью
Л Т
Т t« 2 +
интервала времени усреднения СО,т и фиксируют, например, что за время анализа сигнал x(t) 0 и не изменял своего состояния,. Тогда из (2) и (3) следует, что если даже сигнал x(t) остальное время находится в состоянии x(t) 1, то ДТ Т 2 + Т
UX(0,T)
(
ср
ДТ
N Т,
(5)
Если ДТ выбрано таким, что й Ј Т0 или изменение напряжения на величиДТ
ну -- достаточно для срабатывания регистрирующего порогового устройства, то результаты контроля, зарегистрированные по состоянию сигнала x(t) за время анализа и по результату его усреднения на всем интервале времени, идентичны. Таким образом, анализ состояния сигнала x(t) на начальном отТ
резке длительностью + 4 Т интервала времени усреднения СО,ТЦ обеспечивает повышение производительности контроля.7
Способ осуществляют следующим образом.
В исходном состоянии тактовый сигнал Т - 0, генератор 5 заперт, и уровнем логического О с его выхода за
10
15
20
)
25
30
)
35
0
, 40
45
перт сепектирующий элемент 2. В счетчиках 3 и b в исходном состоянии записано число 0. Исходный уровень с С-выхода счетчика 3 устанавливается в зависимости от заданного критерия годности контролируемого параметра Ux(t). Если параметр годен при Ux(t) U3(t), в исходном состоянии сигнал С 0 и переключается в состояние С 1 после поступления на счетчик 3 заданного числа К импульсов. Если параметр годен при Ux(t) U3(t), то сигнал С 1 и переключается в состояние С 0 при поступлении на счетчик 3 хотя бы одного импульса.
Критерий годности U(t) U3(t).
Контроль параметра начинается с подачи контролируемого Ux(t) и допустимо предельного U3(t) сигналов. Логический сигнал x(t) результата их сравнения устанавливается в состояние x(t) 0 при UK(t) U3(t) и в состояние x(t) 1 при U x(t) U3(t), a также случайно переключается из одного состояния в другое при Ux(t) U3(t) из-за флуктуации сравниваемых сигналов на интервале времени (фиг.2).
Усреднение значения сигнала x(t) на интервале времени начинается после подачи на генератор 5 тактового сигнала , при этом формируется пачка из N импульсовs поступающих на селектор 2 и на счетчик 6.
Число М импульсов, отселектирован- ных сигналов x(t)l, подсчитывается и характеризует распределение состояний сигнала x(t) на интервале времени усреднения t N Т 0, где Т 0 - период следования селектируемых имN
пульсов. При М ;j на интервале времени t преобладает состояние x(t)l
vr ; N
при М т
преобладает состояние
x(t) 0. Если разность уровней напряжений Ux(t) и U3(t) превышает максимальную амплитуду их флуктуации, то М 0 при U x(t) U 3(t) и М
- N при Ux(t) Ug(t), т.е. состояние сигнала x(t) неизменно на всем интервале времени как это изображено на диаграмме И(фиг.2г).
После подсчета в счетчике b (фиг.1)
заданного числа К импульсов на блок 1 логической оценки поступает команда окончания состояния сигнала x(t). Прекращается дальнейший подсчет импульсов . На блок 7 подается также
сигнал С 1 , формируемый счетчиком 3 после подсчета К импульсов. Если сигнал x(t) 1 и не изменен, входные уровни блока 7 совпадут во времени и он переключится в состояние В 1 (фиг.2и, диаграмма II). Сигнал - результат контроля Годен, так как x(t) 1 и Ux(t)- L 3(t) и одновременно, командой на переход к контролю следующего параметра. Если же сигнал x(t) 0, то импульсы на счетчик 3 не проходят, сигнал С сохраняет состояние С 0 и В 0. По окончании пачки селектируемых им- пульсов, т.е окончании интервала времени усреднения, результат контроля регистрируется в блоке 4, соответствующий числу М импульсов. При x(t) 0 на всем интервале усреднения не поступит ни одного импульса. , (при ) соответствует результату контроля Меньше, т.е. Ux(t) U 3(t) |(фиг„2г, диаграмма I),
Если сигнал x(t) переключается на (интервал времени из одного состояния :в другое, как показано на фиг.2г, ди- |аграмма III, то логическая оценка В также неизменна, блок 4 зарегистрирует результат, соответствующий числу М отселектированных импульсов. При поступлении на вход счетчика 3 числа импульсов большего, чем заданное число F, выдается сигнал переключения блока 4. При М . F логический код соответствует результату Меньше по среднему, т.е. Ux(t) U3(t).
Так как результат Меньше тождественен результату Негоден, а изделий с негодными параметрами в се- рийном производстве должно быть очень мало, то данный результат проверяется с усреднением на всем интервале времени.
При М F блок 4 переключается в состояние и логический код , соответствует результату контроля Годен по среднему, т.е. Ux(t) U3(t) (фиг.2г, диаграмма III).
При критерии годности Ux(t) U9(t) в исходном состоянии сигнал и если x(t) 0, то элемент 2 закрыт, счетчик 3 не изменяет своего выход-, ного сигнала, а импульс с выхода счетчика 6 переключает выходной сигнал В в состояние . Сигнал является результатом контроля Годен и одновременно сигналом перехода к контролю следующего параметра о При поступлении на счетчик 3 хотя бы одного импульса сигнал С переключается в состояние и запрещает переключение блока 7. Результат контроля регистрируется блоком 4 аналогично описанному.
Для контроля параметра с двухсторонним допуском используются два устройства: одно с критерием годности Ux(t) U3(t) и второе с критерием годности Ux(t) Up(t). При этом счетчик Ь и блок 7 логической оценки являются общими для обоих устройств.
Период Т0 селектируемых импульсов должен быть не больше 0,01 длительности требуемого интервала усреднения и в 1,5-2 раза больше времени переключения сигнала x(t) блока 1 сравнения из одного состояния в другое .
Достоверность сохраняется равной исходной. Опытно установленоf что достаточно К (0,1 + 0,2). При этом даже если и имеют место кратковременные переключения сигнала x(t) на оставшейся части интервала усреднения под воздействием случайных помех болшой амплитуды, то все равно результа по среднему значению соответствует годности параметра,
Число F отселектированных импульсов, после поступления которых счетчик 3 изменяет сигнал А, выбирается из конкретных условий в интервале
N значений +т, где т
1,2,3,.... Так как имеется ошибка дискретного усреднения, то значение
N
F г не соответствует точному равенству времени нахождения сигнала x(t) в состояниях x(t)l и x(t)0.
N N
При - - m ; М j + т имеет место приближенное равенство сравниваемых напряжений, т.во Ux(t) cs U3(t). СоотNветственно при F + m (для нижней
границы допуска), к негодным параметрам отнесены и те, которые равны границе допуска. Это оправдано при необходимости ужесточенного контроля или при восстанавливаемом браке и
N
т.д. При F - т, параметры, значения которых приближено равны нижнему допуску, классифицируются как годные.
F т m, а другой при + m,
Используя в устройстве для регистрации результата контроля два блока 4, один из которых переключается при
N„ N
2
можно выделять контролируемые параметры по признаку Равно границе допуска.
Отбраковка параметров, значение которых Меньше, Равно нижней,Равно большей и Больше верхней границы допуска с усреднением на всем интервале времени не может существенно сни ;зить положительный эффект, достигав- мый использованием способа, так как в серийном производстве теоретически только 2% контролируемых изделий имеют параметры, близкие к границе допуска (для нормального закона распреде- ления)о
Формула изобретения
Способ автоматического контроля параметров технологического процесса, состоящий в том, что сравнивают контролируемую величину с ее эталоном, в зависимости от результата сравнения по принципу Больше, Меньше или Равно формируют первую высказыва- тельную функцию - положительный исход сравнения и вторую - отрицательный исход сравнения, при возникновении ненулевого значения первой высказывательной функции формиру-
ют сигнал логической единицы, усредняют его на временном интервале, равном периоду контроля, сравнивают усредненное значение с его эталоном, в случае результата сравнения Больше принимают параметр годным, и негодным в противном случае, отличающийся тем, что, с целью „повышения производительности контроля, формируют последовательность селектируемых высокочастотных импульсов, начало которой совпадает с передним фронтом сигнала логической единицы, а конец - с его задним фронтом, устанавливают начальный интервал времени усреднения, равный полупериоду контроля, увеличенному на временной промежуток, больший длительности одного высокочастотного импульса, упомянутой последовательности, в течение начального интервала времени фиксируют наличие либо отсутствие и негодным - при его отсутствии, в случае зафиксированных изменений на начальном интервале времени усреднения сигнала логической единицы результат контроля определяют путем усреднения за весь период контроля, для чего подсчитывают число высокочастотных селектируемых импульсов, а по окончании всего периода контроля по соотношению между числом селектированных импульсов и длительностью контроля определяют его результат.



| название | год | авторы | номер документа |
|---|---|---|---|
| АНАЛИЗАТОР НАПРЯЖЕНИЯ | 1990 |
|
RU2024880C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КВАДРАТУРНОГО СДВИГА ФАЗ ГАРМОНИЧЕСКИХ СИГНАЛОВ | 1994 |
|
RU2091804C1 |
| Устройство для контроля параметров | 1985 |
|
SU1291930A1 |
| Устройство для измерения нестабильности частоты | 1980 |
|
SU940080A1 |
| Устройство для определения медианы случайного процесса | 1986 |
|
SU1352502A2 |
| Устройство для электромагнитного контроля движущихся ферромагнитных изделий | 1990 |
|
SU1739273A2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТРАФИКА В СИСТЕМЕ СВЯЗИ | 1996 |
|
RU2174742C2 |
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ В ЦИФРОВОЙ КОД | 1971 |
|
SU436438A1 |
| Устройство для контроля параметров | 1975 |
|
SU568949A1 |
| Устройство сравнения | 1981 |
|
SU1004959A1 |
Изобретение относится к информационно-измерительной технике и может быть использовано в системах автоматического контроля радиоэлектронных изделий, а также в АСУ ТП. Цель изобретения - повышение производительности контроля. Суть изобретения состоит в выделении на интервале контроля параметра начального интервала времени усреднения, на котором фиксируют поведение контролируемой величины относительно ее эталона. Если параметр не пересекает границу эталонного значения, длительность контроля, согласно изобретению, сокращается. 2 ил.
им
Фиг,1
Фиг. I
| Устройство для контроля напряжений | 1974 |
|
SU528700A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
