Изобретение относится к военно-морской технике, в частности к электромагнитному моделированию ГДП боевого пловца, осуществляющего поиск донных мин с неконтактным взрывателем (НВ). Оно может быть использовано для изучения и оценки воздействия ГДП боевого пловца на гидродинамический НВ.
Известно устройство, позволяющее определить ГДП путем использования магнитогидродинамической аналогии. Устройство представляет собой цилиндрический каркас, в пазы которого уложены проводники. При пропускании по ним тока вокруг цилиндра возникает магнитное поле, которое моделирует ГДП вращающегося цилиндра.
Известное устройство не позволяет моделировать ГДП движущегося в воде тела.
Известно устройство для моделирования аэродинамических характеристик летательных аппаратов, содержащее источник электрического напряжения, измерительную аппаратуру, исследуемый объект, снабженный системой обмоток, моделирующих аэродинамическое поле.
Недостатком данного устройства является невозможность использования его для моделирования гидродинамического поля.
Целью изобретения является расширение функциональных возможностей за счет моделирования ГДП частей тела и ласт боевого пловца.
Поставленная цель достигается тем, что в устройстве для электромагнитного моделирования гидродинамического поля подводного тела, преимущественно боевого пловца, содержащем последовательно соединенные источник электрического напряжения и модель исследуемого объекта, снабженную системой обмоток и измерительную аппаратуру, модель исследуемого объекта выполнена в виде диэлектрических каркасов с нанесенными на них обмотками соленоидов, имитирующих части тела боевого пловца, и имитатора ласт, состоящего из кинематически соединенных между собой прямоугольных диэлектрических пластин, установленных с возможностью вращения одна относительно другой в горизонтальной плоскости, размещенных на пластинах плоских прямоугольных катушек и указателей углов поворота пластин, причем указатели кинематически связаны с соседними прямоугольными пластинами, а плоские прямоугольные катушки включены между собой и в цепь источника электрического напряжения последовательно, при этом диэлектрические каркасы расположены на ползунах вертикальных стоек, установленных на металлическом листе, имитирующем дно водоема.
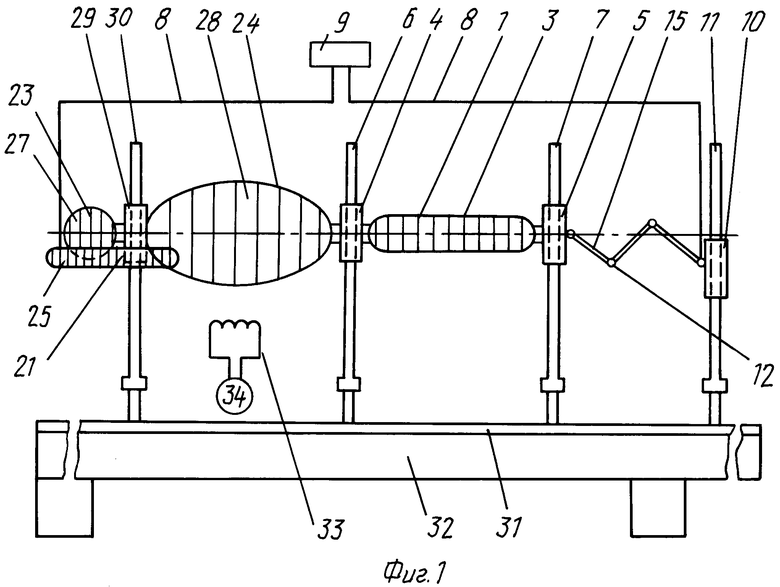
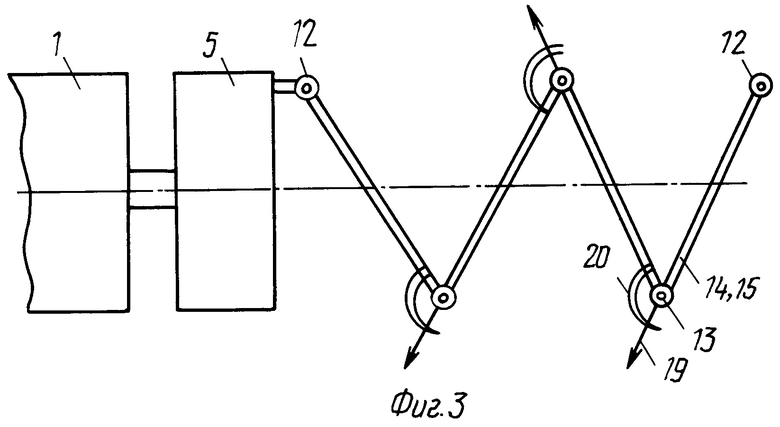
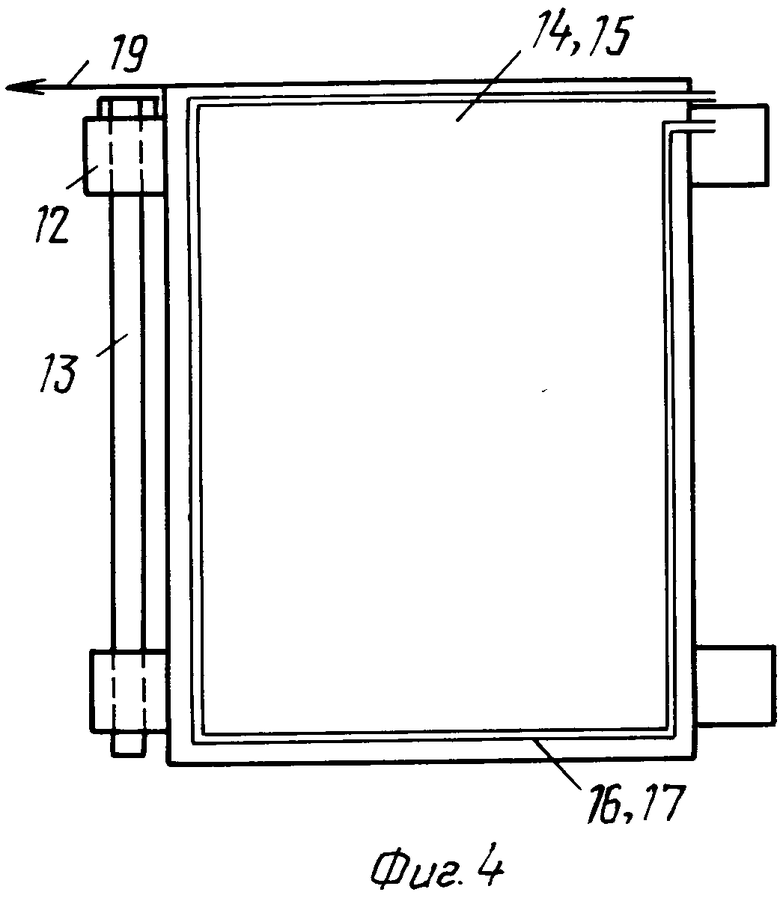
На фиг.1 и 2 показана структурная схема устройства, вид сбоку и сверху; на фиг.3 - схематичное расположение узлов устройства, вид сбоку; на фиг.4 - диэлектрическая прямоугольная пластина.
Устройство содержит каркасы 1 и 2, выполненные из диэлектрика (например, дерева). На каждом из них уложены обмотки соленоидов 3. Каркасы 1 и 2 при помощи ползунов 4 и 5 на стойках 6 и 7 размещены рядом друг с другом в горизонтальной плоскости и проводниками 8 подключены к источнику тока 9. К ползунам 5 и 10 стоек 7 и 11 при помощи соединительных элементов, например петель 12 и штырей 13, присоединен набор пластин 14 и 15. На каждой пластине 14 и 15 на ее плоской стороне расположены (например, приклеены) прямоугольные катушки 16 и 17, которые при помощи проводов 18 соединены между собой и с обмотками 3 последовательно. На одной из сторон каждой пластины 14 и 15 установлен указатель углов, состоящий из стрелки 19 и дуги 20 с градусной шкалой. В модель также входят обмотки 21, 22, 23 и 24, нанесенные на диэлектрические каркасы 25-28, расположенные на ползунах 4 и 29 стоек 6 и 30. Стойки 5, 6, 11, 30 установлены на металлическом листе 31, установленном на основании 32. Лист 31 изготовлен из немагнитного материала (например, из дюраллюминия), имеет размеры в длину и ширину около 3-х длин модели боевого пловца и имитирует дно водоема.
Измерительная аппаратура в устройстве состоит из индукционной катушки 33, подключенной к ламповому вольтметру 34. Обмотки 21 и 22 имитируют левую и правую руки, обмотка 23 - голову, а 24 - туловище с аквалангами на спине боевого пловца. Обмотка 3, нанесенная на каркас 1, имитирует левую, а на каркас 2 - правую ноги пловца. Катушки 16 и 17, нанесенные на пластины 14 и 15, присоединенные к ползуну 5, имитируют соответственно правую и левую ласты. Каждое поперечное сечение каркасов с учетом линейного масштаба моделирования совпадает с соответствующим сечением моделируемого тела пловца.
Работа с моделью осуществляется следующим образом.
Исходя из размеров тела подводного пловца, аквалангов и ласт вытачивают в выбранном линейном масштабе диэлектрические каркасы 1, 2, 25, 26, 27, 28 и пластины 14 и 15 (например, из дерева). На каркасы 1, 2, 25, 26, 27 и 28 наносят обмотки 3, 2, 1, 22, 23 и 24. На пластины 14 и 15 наносят (например, приклеивают) прямоугольные катушки 16 и 17 так, чтобы токи в находящихся на соприкасающихся боковых сторонах соседних пластин катушек, были одного направления. Пластины 14 и 15 соединяют между собой при помощи петель 12 и штырей 13 и устанавливают их на ползунах 5 и 10 стоек 7 и 11. Каркасы 1, 2, 25, 26, 27 и 28 располагают на ползунах 4, 5, 29, 10 стоек 6, 7, 30, 11. Обмотки 3, 21, 22, 24 катушек 16 и 17 при помощи проводников 8 и 18 соединяют между собой последовательно и подключают на выход источника переменного тока 9 (например, генератора звуковой частоты).
При прохождении по обмоткам 3, 21, 22, 23, 24 катушек 16 и 17 переменного тока звуковой частоты (при проведенных опытах 800 Гц) в окружающем модель пространстве возникает переменное магнитное поле, которое в соответствии с МАГА имитирует суммарное гидродинамическое поле вызванных скоростей движущегося пловца и следа, возникающего от движения ласт, т.к. в данном случае обмотки 3, 21, 22, 23 и 24 имитируют гидродинамическое поле ласт, а остальные катушки 16 и 17 имитируют гидродинамическое поле следа, возникающего от колебаний ласт. Соединение пластин 14 и 15 при помощи петель 12 и штырей 13 позволяет установить по стрелке 19 и дуге 20 любой угол между пластинами, т.е. симмитировать амплитуду колебаний ласт. Так как согласно аналогии напряженность Н магнитного поля является аналогом вызванной скорости ω то измерив значение Н в окружающем модель пространстве, получают картину гидродинамического поля вызванных скоростей ω. Измерение Н осуществляется датчиком скорости (например, индукционным датчиком 33), подключенным к регистратору (например, к ламповому вольтметру 34).
Введение в устройство обмоток 21-24 катушек 16 и 17 позволяет моделировать гидродинамическое поле вызванных скоростей тела пловца с ластами и его следа, что по сравнению с известным техническим решением расширяет функциональные возможности устройства. Одновременно получение общего ГДП позволяет провести оценку влияния его на НВ мин.
Изобретение может быть использовано в учебных целях, в качестве технического средства обучения для демонстрации изоляций гидродинамического поля боевого пловца.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования обтекания водой самоходного плавсредства | 1989 |
|
SU1735874A2 |
| Модель рыболовного орудия | 1989 |
|
SU1720073A1 |
| Устройство для моделирования обтекания водой самоходного плавсредства | 1988 |
|
SU1562943A1 |
| Модель тралового мешка | 1989 |
|
SU1711760A2 |
| МОДЕЛЬ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1993 |
|
RU2049360C1 |
| Устройство для изучения гидродинамического поля деталей орудия лова | 1990 |
|
SU1808279A1 |
| Модель рыболовного орудия в соответствии с магнитогидродинамической аналогией | 1988 |
|
SU1539822A1 |
| Модель движущегося объекта | 1988 |
|
SU1517061A2 |
| Модель деталей орудий лова | 1985 |
|
SU1324611A1 |
| Модель плоского профильного тела | 1990 |
|
SU1824135A1 |
Изобретение относится к военно-морской технике, в частности, к электромагнитному моделированию гидродинамического поля боевого пловца, осуществляющего поиск донных мин с неконтактным взрывателем (НВ). Цель изобретения - расширение функциональных возможностей за счет моделирования гидродинамического поля частей тела боевого пловца. Устройство содержит каркасы 1 и 2, выполненные из диэлектрика, на которых уложены обмотки 3 соленоидов. Каркасы 1 и 2 при помощи ползунов 4 и 5 на стойках 6 и 7 размещены рядом друг с другом в горизонтальной плоскости, проводниками 8 подключены к источнику тока 9. К ползунам 5 и 10 стоек 7 и 11 присоединен набор пластин 14 и 15, на плоских сторонах которых расположены прямоугольные катушки 16 и 17, соединенные проводами 18 и обмотками 3 последовательно. На одной из сторон каждой пластины 14 и 15 установлен указатель углов. В модель также входят обмотки 21, нанесенные на диэлектрические каркасы 25 - 28, расположенные на ползунах 4 и 29 стоек 6 и 30. Обмотки 21 и 22 имитируют левую и правую руки, обмотка 23 - голову, а обмотка 24 - туловище с аквалангами на спине боевого пловца. Обмотка 3, нанесенная на каркас 1, имитирует левую, а обмотка 2 - правую ногу пловца. Катушки 16 и 17, нанесенные на пластины 14 и 15, присоединенные к ползуну 5, имитируют соответственно правую и левую ласты. Каждое поперечное сечение каркасов с учетом линейного масштаба моделирования совпадает с соответствующим сечением моделируемого тела пловца. 4 ил.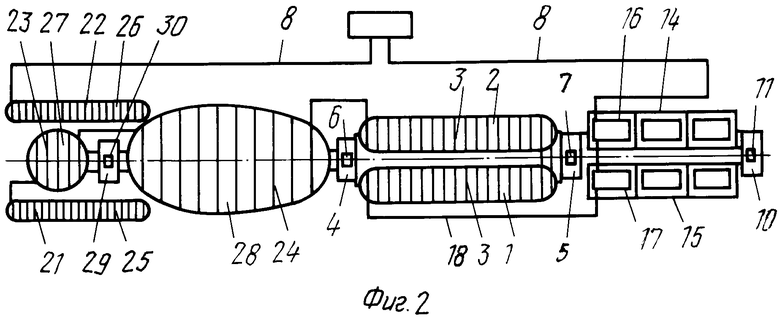
УСТРОЙСТВО ДЛЯ ЭЛЕКТРОМАГНИТНОГО МОДЕЛИРОВАНИЯ ГИДРОДИНАМИЧЕСКОГО ПОЛЯ ПОДВОДНОГО ТЕЛА, преимущественно боевого пловца, содержащее последовательно соединенные источник электрического напряжения и модель исследуемого объекта, снабженную системой обмоток, и измерительную аппаратуру, отличающееся тем, что, с целью расширения функциональных возможностей за счет моделирования гидродинамического поля частей тела боевого пловца, модель исследуемого объекта выполнена в виде диэлектрических каркасов с нанесенными на них обмотками соленоидов, имитирующих части тела боевого пловца, и имитатора ласт, состоящего из кинематически соединенных между собой прямоугольных диэлектрических пластин, установленных с возможностью вращения одна относительно другой в горизонтальной плоскости, размещенных на пластинах плоских прямоугольных катушек и указателей углов поворота пластин, причем указатели кинематически связаны с соседними прямоугольными пластинами, а плоские прямоугольные катушки включены между собой и в цепь источника электрического напряжения последовательно, при этом диэлектрические каркасы расположены на ползунах вертикальных стоек, установленных на металлическом листе, имитирующем дно водоема.
| Устройство для моделирования аэродинамических характеристик летательных аппаратов | 1980 |
|
SU896641A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
