Изобретение относится к области автоматики и вычислительной технике и может быть использовано в системах упр авл ения ро б о тами.
Целью изобретения является упрощение способа.
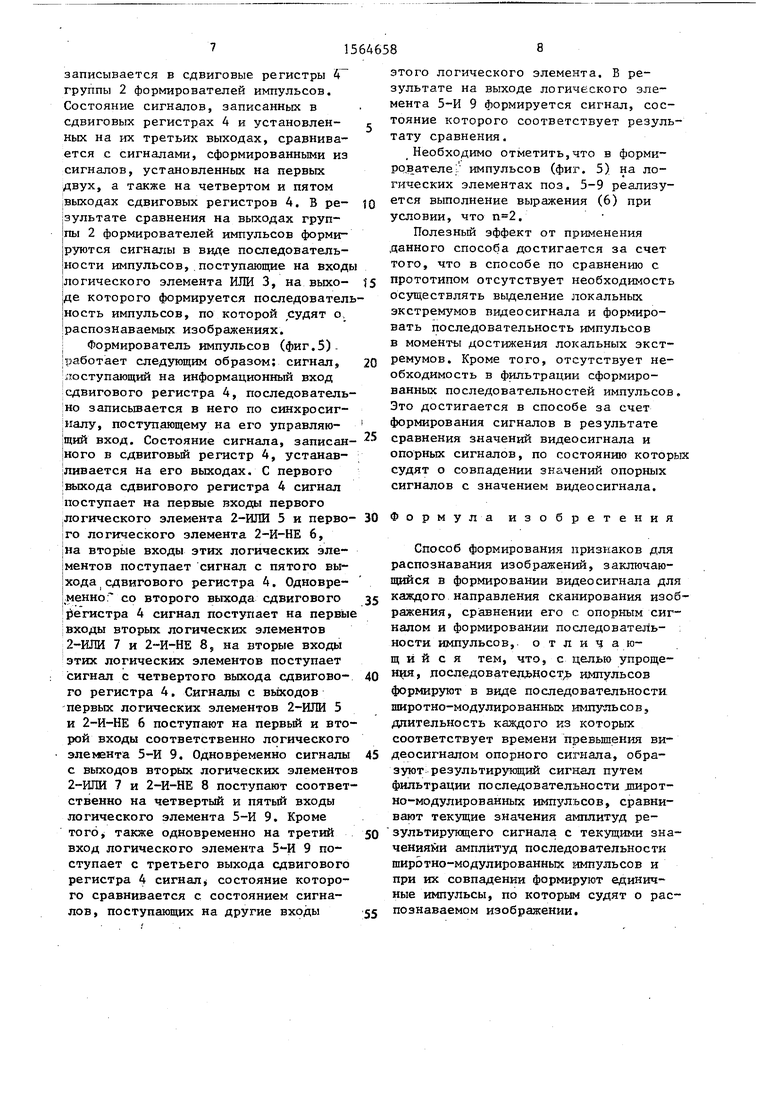
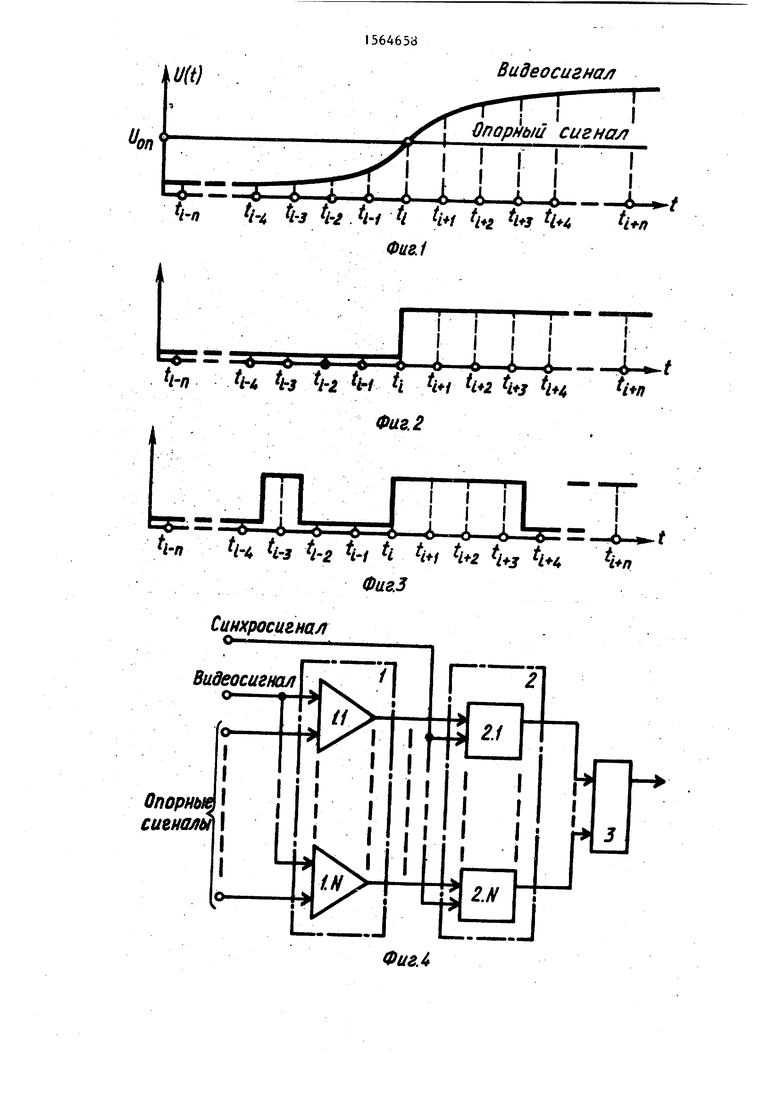
На фиг. 1 дана схема состояния видеосигнала, значение которого совпадает со значением опорного сигнала в некоторой точке; на фиг. 2 - схема сигнала, полученного в результате сравнения значений видеосигнала и опорного сигнала; на фиг. 3 - схема сигнала, полученного в результате сравнения значений опорного сигнала и видеосигнала, содержащего шумовую помеху; на фиг. 4 - функциональная схема варианта устройства, реализующего предлагаемый способ; на фиг.5 функциональная схема формирователя импульсов.
Вариант устройства (фиг. 4)содержит группу 1 элементов сравнения, группу 2 формирователей импульсов, логический элемент ИЛИ 3.
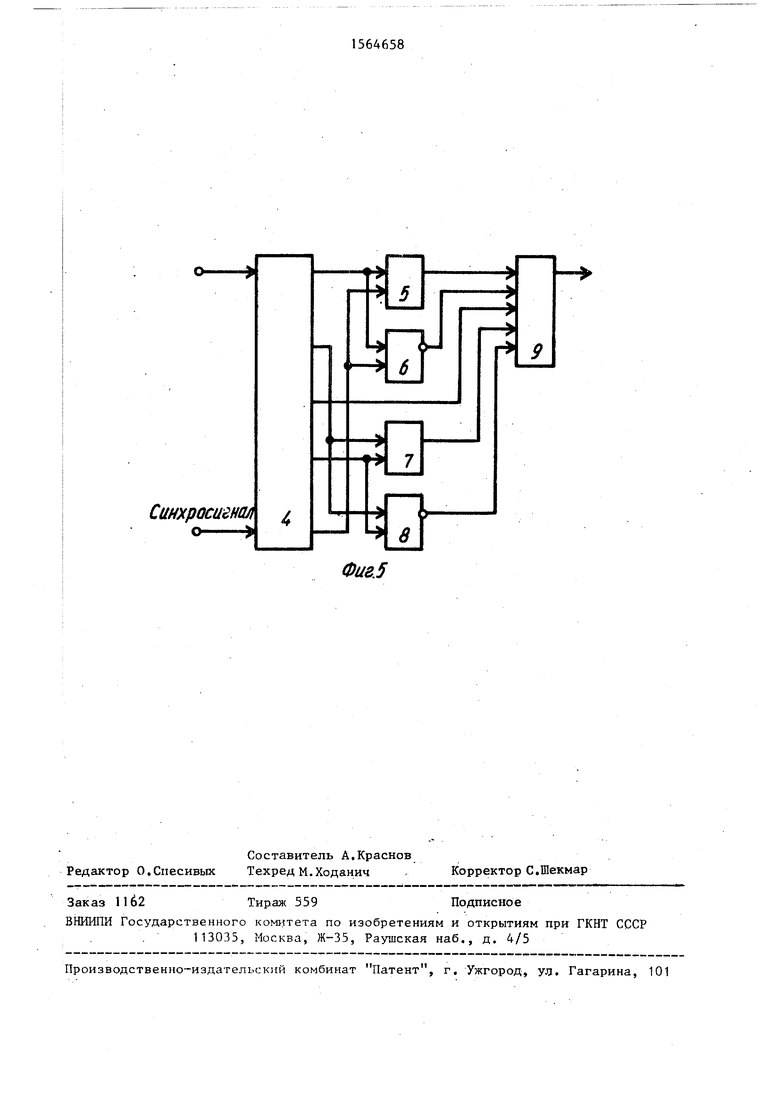
Формирователь импульсов (фиг.5) содержит сдвиговый регистр 4 (например, регистр К155ИР13), первый логический элемент 2-ИЛИ 5, первый логический элемент 2-И-НЕ 6, второй ло- гический элемент 2-ИЛИ 7, второй логический элемент 2-И-НЕ 8, логический элемент 5-И 9. Все элементы функциональных схем выполнены в соответствии со стандартной схемотехникой.
Рассмотрим состояние видео сигнала( значение которого совпадает в неко5Л
О 4ь
СЈ
сл
00
торый момент времени tj с значением опорного сигнала (см, фиг. 1). Определим с некоторым постоянным шагом &t N точек, лежащих слева, .и N точек лежащих справа от точки t;, и будем сравнивать значения опорного сигнала и видеосигнала в моменты времени, соответствующие этим точкам. Очевидно, что для всех точек, лежащих ле- вее точки t;, вследствие заданного состояния видеосигнала выполняется неравенство
U(tU)Uon,,2,...,N, (О
где U(t) - функция, описывающая значение видеосигнала; Uon - значение опорного сигнала Для всех точек, лежаших правее точки tj, а также и для нее самой будет выполняться неравенство:
U(t,4f,)5Uon,V; 1,2,...,N. (2)
Теперь представим результат сравнения значений видеосигнала и опор- яого сигнала в виде некоторого бинарного сигнала - последовательности широтно-модулировэнных импульсов (см. фиг. 2)в Очевидно, что в соответствии с, фиг. 2 в ючке состоя1- пие этого сигнала изменяется из одного состояния в противоположное.
Рассмотрим состояние сигнала, приведенного на фиг. 2. Для всех точек, лежащих левее точки t,j, выполняется условие
.+п,,2,...,Ы, (3)
где X - значение сигнала, соответствующее точкам, лежащим левее точки
X п- значение сигнала, соответствующее точкам, лежащим правее точки, tj ,
Будем считать, что значение сиг- йала, соответствующее точке tj, удовлетворяет следующему условию:
, ,29...,м.
1 + И
(4)
Очевидно, что состояние сигнала, Приведенное на фиг. 2, изменится на противоположное в случае, если состояние видеосигнала (см. фиг. I) для всех точек, лежащих левее точки t, удовлетворяет неравенству (2)} а для всех точек, лежащих правее точки tt9 удовлетворяет неравенству (1). При этом будем считать, что значение
сигнала, полученного в результате сравнения значений видеосигнала и опорного сигнала, и соответствующее точке t, , удовлетворяет следующему условию:
,Yn,2,...,Ns (5)
В соответствии с тем, что регистрации подлежат только те моменты времени, для которых выполняется условие (3) и либо условие (4) либо условие (5), будем определять для каждого момента времени значение некоторой логической функции, зависящей от состояния сигналов для некоторого предшествующего числа элементов данному и для того же числа моментов, последующих за ним, принимающей единичное значение только в тех случаях, когда сигнал, полученный в результате сравнения значений опорного сигнала и видеосигнала, соответствуют совпадению этих значений. Нетрудно убедиться, что в качестве такой логической функции можно использовать следующее выражение:
У,4 ( . . . ,Х;(,Х; ,Х,
Х
5 0
5
0
5
0
Х;((,Ч()(Х.Х;„))((Х;.аУХ,) (6)
Сх,чх41)) OW х ,ч„) )3.
Из приведенного выражения следует, что для того, чтобы определить состояние сигнала, полученного в результате сравнения значений видеосигнала и опорного сигнала, в некоторый момент времени можно определить состояние этого сигнала для некоторого числа моментов, последующих за данным, и для того же числа моментов, предшествующих данному. Используя полученные данные о состоянии этого сигнала, сформировать другой - результирующий сигнал (см. в квадратных скобках выражения (6)),и сравнить состояние полученного результирующего сигнала с состоянием в соответствующий момент времени сигнала, полученного в результате сравнения значений опорного сигнала и видеосигнала. Полученный в результате сигнал высокого уровня будет соответствовать совпадению значений опорного сигнала и видеосигнала. На основании изложенного нетрудно убедиться, что при сравнении состояния сформированного сигнала и сигнала, полученного в результате сравнения значений
видеосигнала и опорного сигнала, происходит фильтрация или коррекция значений этого сигнала. В это нетрудно убедиться. Рассмотрим состоян сигнала, приведенного на фиг, 3, полученного при сравнении значений опорного сигнала и видеосигнала, содержащего шумовую помеху. Считаем,
что в момент времени, соответствующи точке t; , состояние этого сигнала меняется в результате совпадения значений видеосигнала и опорного сигнала. Считаем также, что изменение этого сигнала в моменты времени, не соответствующие точке t , вызвано действием шумовых помех, содержащихся в видеосигнале. Используя выражение (6) и полагая , получим, что будут зафиксированы изменения сигнала не только в момент времени, соответствующий точке t;, но и в моменты времени, соответствующие точкам t; и t;+9. Однако, полагая в выражении (6), получим, что будет зафиксировано изменение сигнала только в момент времени, соответствующий точке t;. Далее полагая в выражении (6), получим, что в соответствии с фиг. 3 не будет вообще зафиксировано изменение сигнала. Таким образом, подбирая значение параметра п в выражении (6), т.е. подбирая число моментов времени, в течение которого состояние сигнала, полученного в результате сравнения значений видеосигнала и опорного сигнала, должно быть неизменным, можно добиться необходимого качества фильтрации помех, вызванных наличием шумовых помех в видеосигнале. Кроме того, необходимо отметить, что выражение, заключенное в квадратные скобки выражения (6),,можно изменить и использовать другое, удовлетворяющее изложенным ранее требованиям и позволяющее обеспечить требуемое качество для определения моментов времени, в которые значения опорного сигнала и видеосигнала совпадают.
Вариант устройства, реализующий способ (фиг. 4) содержит группу 1 элементов сравнения, первые входы которых объединены между собой и яв
формирователей импульсовs вторые а.чо- ды которых объединены между собой и являются первым входом устройства, выходы группы 2 формирователей им- пульсов соединены с входами логического элемента ИЛИ 3, выход которого является выходом у.-тройства.
Формирователь импульсов (фиг. 5),
0 ГРУППЫ 2 формирователей импульсов,
содержит сдвиговый регистр 4, информационный вход которого является первым входом формирователя импульсов, управляющий вход сдвигового регистра
5 4 является вторым входом формирователя импульсов, первый выход сдвигового регистра 4 соединен с первыми входами первого логического элемента 2-ИЛИ 5 и первого логического эле0 мента 2-И-НЕ 6, вторые зходы которых соединены между собой и пятым выходом сдвигового регистра 4, второй выход сдвигового регистра 4 соединен с первыми входами второго логического
5 элемента 2-ИЛИ 7 и второго логического элемента 2-И-НЕ 8, вторые входы которых соединены межгу собой и четвертым выходом сдвигового регистра 4, третий выход которого соединен с 0 третьим входом логиче9кого- элемента 5-И 9, первый вход логического элемента 5-И соединен с выходом первого логического элемента 2-ИЛИ 5, второй вход соединен с выходом первого логического элемента 2-И-КЕ 6, четвертый вход соединен с выходом второго логического элемента 2-ИЛИ 7, пятый вход соединен с выходом второго логи- . ческого элемента 2-И-НЕ 8, выход логического элемента 5-И 9 является выходом формирователя импульсов.
Устройство (фиг. 4) работает следующим образом.
На второй вход устройства подается
5 видеосигнал, который сравнивается
группой 1 элементов сравнения с опор- ными сигналами, поступающими на вторые входы группы 1 элементов сравнения с соответствующих им входов уст0 ройства. Бинарный сигнал, являющийся результатом сравнения видеосигнала с опорными сигналами,поступает с выходов группы 1 элементов сравнения на первые входы группы 2 формирова5
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для считывания графической информации | 1988 |
|
SU1606980A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЙ ПО БАЗОВОМУ ИНТЕГРАЛЬНОМУ МЕТОДУ (БИМ) | 1996 |
|
RU2162247C2 |
| Устройство для селекции изображений объектов | 1983 |
|
SU1188765A1 |
| Устройство для селекции изображений объектов | 1989 |
|
SU1777651A3 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2170437C1 |
| Устройство формирования сигнала изображения | 1987 |
|
SU1443204A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА СИГНАЛОВ С ОГРАНИЧЕННЫМ СПЕКТРОМ (ВАРИАНТЫ) | 2004 |
|
RU2265278C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЙ ПО БАЗОВОМУ ИНТЕГРАЛЬНОМУ МЕТОДУ (БИМ) | 1996 |
|
RU2162248C2 |
| Устройство для считывания изображений | 1987 |
|
SU1481816A2 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЯ | 1992 |
|
RU2045781C1 |
Изобретение относится к автоматике и вычислительной технике и предназначено для использования в системах управления роботами. Целью изобретения является упрощение способа. Цель достигается в результате того, что при формировании видеосигнала, соответствующего выбранному направлению сканирования изображения, сравнивают его с опорным сигналом, формируют последовательность широтно-модулированных импульсов, формируют результирующий сигнал, сравнивают его значение со значениями широтно-модулированных импульсов и при их совпадении формируют последовательность единичных импульсов, по которой судят о распознаваемом изображении. 5 ил.
ляются вторым входом устройства, вто- с5 телей импульсов, с первого входа уст- рые входы группы 1 элементов сравнения ройства поступает синхросигнал в ви- являются также входами устройства, выходы группы 1 элементов сравнения соединены с первыми входами группы 2
де последовательности опорных импульсов, по которой состояние сигнала на выходах группы 1 элементов сравнения
телей импульсов, с первого входа уст- ройства поступает синхросигнал в ви-
де последовательности опорных импульсов, по которой состояние сигнала на выходах группы 1 элементов сравнения
записывается в сдвиговые регистры 4 группы 2 формирователей импульсов. Состояние сигналов, записанных в сдвиговых регистрах 4 и установлен- ньк на их третьих выходах, сравнивается с сигналами, сформированными из сигналов, установленных на первых двух, а также на четвертом и пятом выходах сдвиговых регистров 4. В ре- ,зультате сравнения на выходах груп- |пы 2 формирователей импульсов формируются сигналы в виде последовательности импульсов, поступающие на входы Логического элемента ИЛИ 3, на выхо- |де которого формируется последователь |Ность импульсов, по которой судят о распознаваемых изображениях.
Формирователь импульсов (фиг.5). работает следующим образом; сигнал, поступающий на информационный вход сдвигового регистра 4, последовательно записывается в него по синхросигналу, поступающему на его управляю- щий вход. Состояние сигнала, записан- ного в сдвиговый регистр 4, устанавливается на его выходах. С первого выхода сдвигового регистра 4 сигнал поступает на первые входы первого Логического элемента 2-ИЛИ 5 и перво- го логического элемента 2-И-НЕ 6, ,на вторые входы этих логических элементов поступает сигнал с пятого выхода сдвигового регистра 4. Одновременно со второго выхода сдвигового регистра 4 сигнал поступает на первы входы вторых логических элементов 2-ИЛИ 7 и 2-И-НЕ 8, на вторые входы этих логических элементов поступает сигнал с четвертого выхода сдвигово- го регистра 4. Сигналы с выходов первых логических элементов 2-ИЛИ 5 и 2-И-НЕ 6 поступают на первый и второй входы соответственно логического элемента 5-И 9. Одновременно сигналы с выходов вторых логических элементо 2-ИЛИ 7 и 2-И-НЕ 8 поступают соответственно на четвертый и пятый входы логического элемента 5-И 9. Кроме того, также одновременно на третий вход логического элемента 5-И 9 поступает с третьего выхода сдвигового регистра 4 сигнал, состояние которого сравнивается с состоянием сигналов, поступающих на другие входы
этого логического элемента. В результате на выходе логического элемента 5-И 9 формируется сигнал, состояние которого соответствует результату сравнения.
Необходимо отметить,что в формирователе импульсов (фиг. 5) на логических элементах поз. 5-9 реализуется выполнение выражения (6) при условии, что .
Полезный эффект от применения данного способа достигается за счет того, что в способе по сравнению с прототипом отсутствует необходимость осуществлять выделение локальных экстремумов видеосигнала и формировать последовательность импульсов в моменты достижения локальных экстремумов. Кроме того, отсутствует необходимость в фильтрации сформированных последовательностей импульсов Это достигается в способе за счет формирования сигналов в результате сравнения значений видеосигнала и опорных сигналов, по состоянию котор судят о совпадении значений опорных сигналов с значением видеосигнала.
Формула изобретения
Способ формирования признаков для распознавания изображений, заключающийся в формировании видеосигнала дл каждого направления сканирования изоражения, сравнении его с опорным сигналом и формировании последовательности, импульсов, отличающийся тем, что, с целью упрощения, последовательности импульсов формируют в виде последовательности широтно-модулированных импульсов, длительность каждого кз которых соответствует времени превышения видеосигналом опорного сигнала, образуют результирующий сигнал путем фильтрации последовательности лшрот- но-модулированных импулъсов, сравнивают текущие значения амплитуд ре- зультирующего сигнала с текущими значениями амплитуд последовательности широтно-модулированных импульсов и при их совпадении формируют единичные импульсы, по которым судят о распознаваемом изображении.
-«
4-4-4--L-A-&-4- //-4 4-j 4. 4-/ 4 //#2 v/
Ъ-П i-4 tj 4- 4-/ ft
asJ
Синхросигнал
Видеосигнал} о-
Опорный сигналы
I
Фиг. 2
Г
г/
i
I I I i
i.l I
Г
Фиг4
Синхросигнал о
Фи&5
