Изобретение относится к робототехнике и может быть использовано при проведении исследовательских, приемосдаточных и других испытаний промышленных роботов.
Целью изобретения является повышение точности измерения перемещений роботов- манипуляторов.
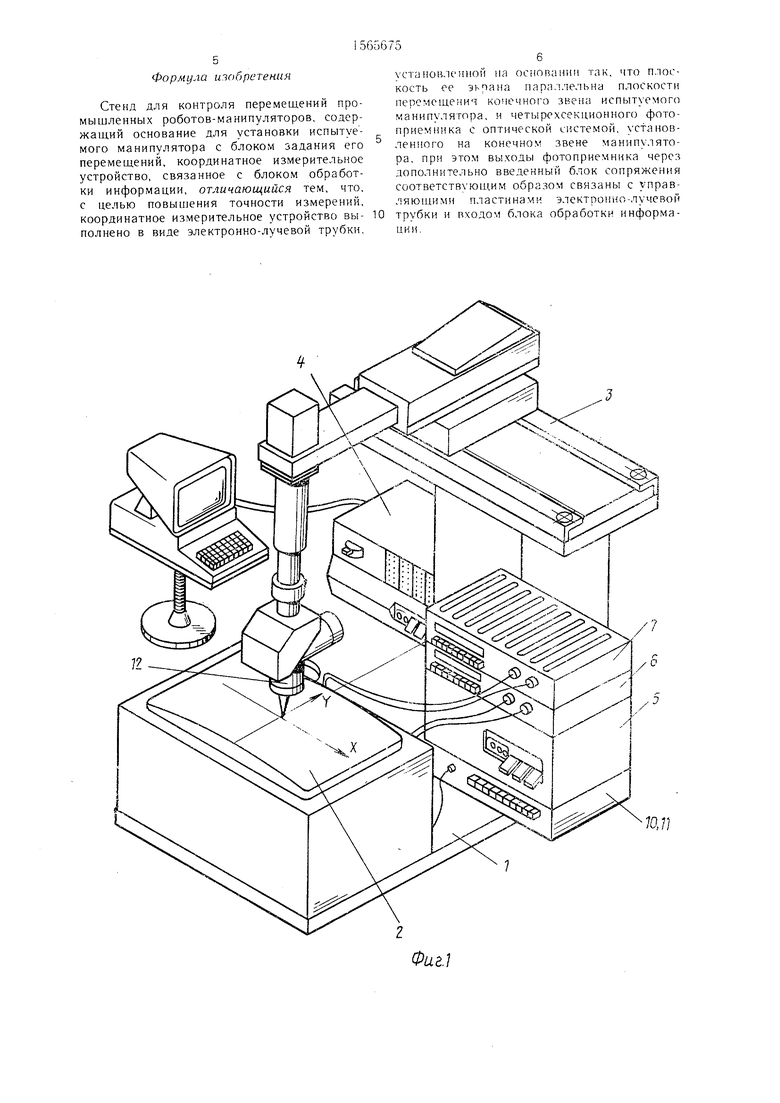
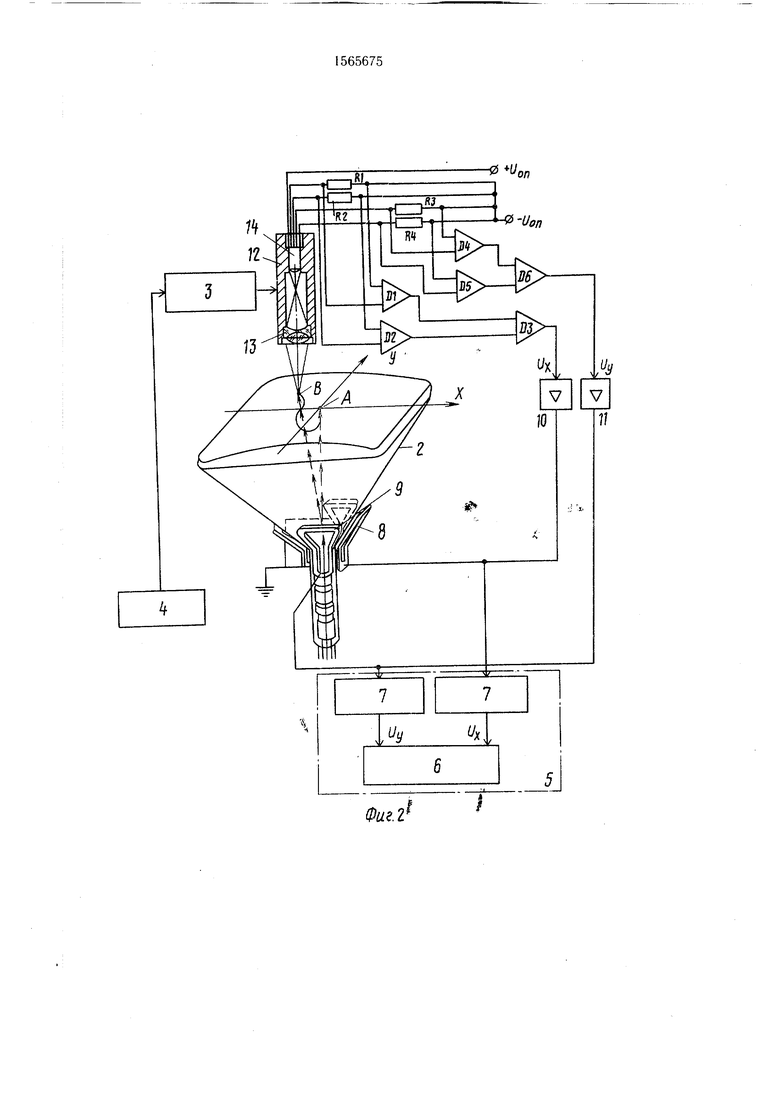
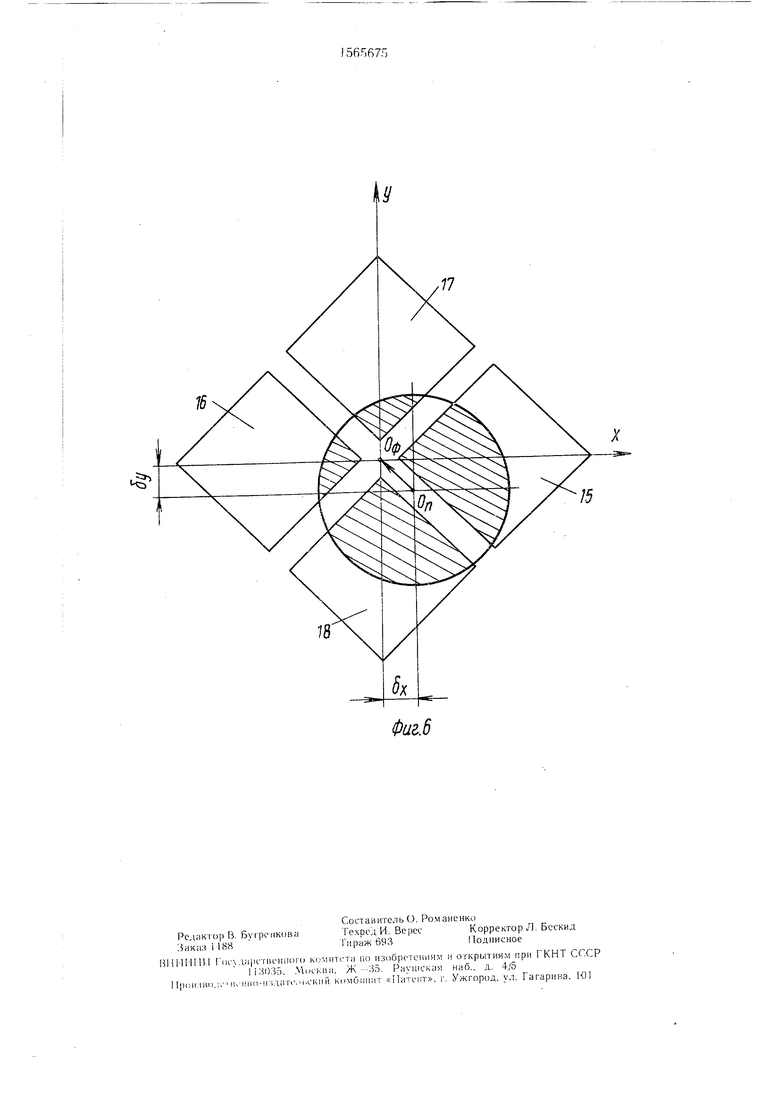
На фиг. 1 показан стенд, общий вид; на фиг. 2 - структурная схема стенда; на фиг. 3 -5 - стадии выхода конечного звена робота в реперную точку; на фиг. 6 - информационное поле фотоприемника.
Стенд (фиг. 1 и 2) содержит основание 1 с установленным на нем координатным измерительным устройством в виде электронно-лучевой трубки (ЭЛТ) 2 и стойкой с испытуемым манипулятором 3. блок 4 задания перемещений манипулятора 3, блок 5 обработки информации, включающий в себя блок 6 регистрации и цифровые воль- метры 7. Отклоняющие пластины 8 и 9
ных усилителей О : I ; ропых вольтметров 7. ;; лятора 3 установлен onv-i который содержит опт:-:1-: и четыре.хсскцнонпып ;:-м:;-.м: секции 15 и 6 КОТОРОМ . оси У. а сек;и::; 17 и ;
ОСИ X (фНГ. fi) . Rh ч: -.: . Г Ч
фотоприемннка 14 ЧОР. ; .;;ф:и . усилители D-. - Dr, и р: .-.-;:.ПМ - :- заны с -. сн. 1 ;тслг1
I) -О,; О ПО-:Н...Н. .
лями 10 i-i I i обра.л ;У г; ,-, Стенд используют При включении, стсм..;: сфокчч- электронной пушкой ЗЛТ :iV4 вием положительного по. 1я ;п:.-,; ляется к экрану и, бомбардиру; фор экрана, заставляет его ,-;-к результате в центре экрана ЗЛТ световое пятно А (фиг. 3) Яок: определяется электрическим то
i
Перед началом испытаний манипулятор 3 расположен таким образом, что оптический локатор 12 находится под ЭЛТ 2 (фиг. 1 и 2). Затем манипулятор программно выводится в центр экрана и световое пятно проецируется оптической системой 13 на секции 15-18 фотоприемника 14. Если манипулятор вывел локатор 12 с некоторой ошибкой относительно исходного положения пятна, то, например, секпредставляет собой компенсационную измерительную систему с компенсацией перемещений. Как и любая компенсационная схема, она имеет определенную статическую ошибку (центр пятна в статическом положении смешен относительно центра захвата в направлении к центру ЭЛТ на величины б и б., (фиг. 5). которые
обратно пропорциональны координатам X и У захвата). Поскольку предлагаемая схема
ция 15 (фиг 6) бу хот освещена боль- 10 содержит три каскада усиления, то общий ше, чем противоположная ей секция 16, коэффициент усиления является произведением коэффициентов усиления всех каскадов и в данном случае составляет величину порядка 7000--5000, что обеспечивает статическую ошибку не более 0,01 мм. Эта статическая ошибка автоматически учитывается блоком 5 обработки информации так же, как и другие постоянные погрешности, например, нелинейность характеристики ЭЛТ, сферичность экрана и др
ности потенциалов, а следовательно, и раз- 20 При тарировке стенда, когда локатор 12 ности площадей засветки секций 15 и 16. установлен на схвате заведомо годного
манипулятора, оснащенного прецизионными датчиками положений, формируется маси через резистор R1 (фиг. 2) потечет больший ток, чем через резистор R2 и, следовательно, на резисторе R1 будет большая разность потенциалов, чем на резисторе R2. Потенциалы на резисторах R1 и R2 усиливаются дифференциальными усилителями D1 и D2 соответственно, а на выходе дифференциального усилителя D3 устанавливается сигнал, пропорциональный разЭто напряжение повышается усилителем 10 до рабочего напряжения отклоняющих пластин 8. В результате на пластинах 8 появляется потенциал, пропорциональный отклонению локатора по координате X относительно светового пятна А, играющего роль реперной точки. Аналогичные процессы происходят одновременно и по второй координате У. При появлении
25
сив тарировочных данных, который каждому значению U и Uy ставит во взаимно-однозначное соотношение точное значение X и У.
После захвата пятном А начального положения манипулятора 3 блок 4 задапотенциалов на отклоняющих пластинах све- 30 ния перемещений начинает отрабатывать
предварительно заложенную в него программу испытания манипулятора, показания вольтметров 7 заносятся в блок регистрации по показаниям штатного таймера. После окончания программы испытания с потовое пятно А смещается в направлении, определяемом соотношением потенциалов I1 и 1 у, а поскольку эти потенциалы пропорциональны площадям засветки секций 18. то перемещение пятна происходит
вдоль вектора, соединяющего центр О 35 мощью массива тарировочных данных произпятна с центром фотоприемника (фиг. 6), т. е происходит захват пятном оптической оси фотоприемника с образованием постоянного контура слежения за положением
этой оси.
Поскольку быстродействие оптоэлектрон-ми для данной программы координатами,
ной системы слежения значительно превы- на основании чего делается заключение о шает быстродействие механической системы манипулятора, любые перемещения манипуводится пересчет массивов показании вольтметров Ux и U у в массив истинных координат манипулятора X и У, которые он имел в определенный момент времени. Эти координаты сравниваются с эталоннылятора будут сопровождаться синхронным
степени соответствия перемещения испытуемого манипулятора эталонному, в частности вычисляются отклонения в отработке
перемещением пятна по экрану ЭЛТ 2. 45 эталонных траекторий и эталонных положеПо мере устранения рассогласования осей пятна А и фотоприемника, значения Ux Uy будут уменьшаться до величины, пропорциональной координатам X и У пятна (фиг. 4), т. е. после захвата положения
ний захвата, производится статическая обработка результатов испытаний. На стенде информации о координатах и времени их отработки можно вычислить путем исследовательного численного дифференцит
оси фотоприемника на пластинах 8 и 9 ав- 50 рования значение скорости и ускорения
представляет собой компенсационную измерительную систему с компенсацией перемещений. Как и любая компенсационная схема, она имеет определенную статическую ошибку (центр пятна в статическом положении смешен относительно центра захвата в направлении к центру ЭЛТ на величины б и б., (фиг. 5). которые
сив тарировочных данных, который каждому значению U и Uy ставит во взаимно-однозначное соотношение точное значение X и У.
После захвата пятном А начального положения манипулятора 3 блок 4 зада г
водится пересчет массивов показании вольтметров Ux и U у в массив истинных координат манипулятора X и У, которые он имел в определенный момент времени. Эти координаты сравниваются с эталоннына основании чего делается заключение о
степени соответствия перемещения испытуемого манипулятора эталонному, в частности вычисляются отклонения в отработке
эталонных траекторий и эталонных положений захвата, производится статическая обработка результатов испытаний. На стенде информации о координатах и времени их отработки можно вычислить путем исследовательного численного дифференцит
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вывода информации на экран электроннолучевой трубки | 1977 |
|
SU682892A1 |
| СПОСОБ И УСТРОЙСТВА ДЛЯ ИСПЫТАНИЯ СТРЕЛКОВОГО ОРУЖИЯ И/ИЛИ СТЕНДОВЫХ ИСПЫТАНИЙ РАКЕТНЫХ ДВИГАТЕЛЕЙ | 2022 |
|
RU2790353C1 |
| Устройство для отображения информации на проекционном экране | 1989 |
|
SU1672519A1 |
| Устройство для отображения информации | 1980 |
|
SU1068978A1 |
| Устройство для отображения статических характеристик объекта на экране электронно-лучевой трубки | 1982 |
|
SU1062763A1 |
| Устройство для измерения размера пятна электронно-лучевой трубки | 1986 |
|
SU1417078A1 |
| Устройство для считывания графической информации | 1984 |
|
SU1262544A1 |
| Устройство для измерения пикового значения яркости пятна электроннолучевых трубок | 1977 |
|
SU639047A1 |
| Устройство для вывода информации на экран электронно-лучевой трубки | 1988 |
|
SU1578738A1 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270523C1 |

Изобретение относится к робототехнике. Цель изобретения - повышение точности измерения перемещений испытываемых манипуляторов. Для этого на конечном звене испытываемого манипулятора (захвате) устанавливается оптический локатор, состоящий из оптической системы и четырехсекционного фотоприемника. Координатное измерительное устройство стенда выполнено в виде электронно-лучевой трубки (ЭЛТ), отклоняющие пластины которой связаны через блок сопряжения с выходами фотоприемника. По командам блока задания перемещений производится программное движение испытываемого манипулятора, при этом осуществляется синхронное перемещение светящегося пятна на экране ЭЛТ, положение которого совпадает с положением оси фотоприемника. Блоком обработки информации производится определение координат положения захвата манипулятора по напряжениям, подаваемым на отклоняющие пластины ЭЛТ. 6 ил.
тематически установятся новые значения Uy и Цу, соответствующие координатам X и У пятна на экране. Эти значения напряжения через цифровые вольтметры 7 вводятся в блок 5 обработки информации
и также сравнить их с эталонными значениями по каждой координате.
Установив еще одну ЭЛТ в плоскости, перпендикулярной экрану первой ЭЛТ, и снабдив ее аналогичной системой слев виде чисел, пропорциональных коор- 55жения, можно получить информацию о динам пятна, а следовательно, и началь-пространственной траектории манипулято- ным значениям координат центра локато-ра 3 и производить контроль его перемера 12. Данная оптоэлектрическая схемащения по трем координатам.
и также сравнить их с эталонными значениями по каждой координате.
Установив еще одну ЭЛТ в плоскости, перпендикулярной экрану первой ЭЛТ, и снабдив ее аналогичной системой слеФормула изобретения
Стенд для контроля перемещений промышленных роботов-манипуляторов, содержащий основание для установки испытуемого манипулятора с блоком задания его перемещений, координатное измерительное устройство, связанное с блоком обработки информации, отличающийся тем, что, с целью повышения точности измерений, координатное измерительное устройство вы- полнено в виде электронно-лччевой трубки.
установленной на основании так, что плоскость ее эьпана параллельна плоскости перемещение конечного звена испытуемого манипулятора, и четырехсекционного фотоприемника с оптической системой, установленного на конечном звене манит лято- ра, при этом выходы фотоприемника через дополнительно введенный блок сопряжения соответствующим образом связаны с управляющими пластинами электронно-лучевой трубки и входом блока обработки информации
on
Фиг.2
| Способ определения пространственного движения звеньев манипулятора и устройство для его осуществления | 1985 |
|
SU1364466A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
