Изобретение относится к машиностроению и может быть использовано для определения пространственных движений звеньев манипуляторов различных типов - как с ручным управлением, так и автоматических.
Целью изобретения является расширение функциональных возможностей и упрошение.
При предлагаемом способе появляется возможность определять не только предварительно заданные, но и заранее неизвестные законы пространственного движения звеньев манипулятора, а также исключается необходимость предварительного программного согласования движений двух машин - манипулятора и координатного измерительного устройства.
На чертеже представлено устройство для определения пространственного движения звеньев манипулятора.
Одно из звеньев манипулятора 1, например звено 2 (схват), взаимодействует через блок 3 чувствительных элементов с конечным звеном 4 координатного измерительного устройства. Выход блока 6 задания движений подключен к входу блока 7 управления манипулятора, вход вычислительного блока 8 которого связан с выходом блока
3чувствительных элементов, вход блока 9 управления координатного измерительного устройства соединен с выходом блока 8, один вход блока 10 обработки информации связан с выходом блока 3 чувствительных элементов, а другой - с датчиками координатного измерительного устройства 5. Выходы блока 7 и блока 9 подключены к приводам соответствуюш.их степеней подвижности манипулятора и координатного измерительного устройства.
Блок 3 чувствительных элементов представляет собой многомерный измеритель те- кушего относительного положения звена 2 манипулятора и конечного звена 4 координатного измерительного устройства. Количе- ство первичных преобразователей блока 3 определя ется его конструктивной схемой, причем могут использоваться как контактные датчики, так и бесконтактные.
В качестве блока 6 задания движений может быть использован блок задания программ для автоматических манипуляторов либо устройство ручного или полуавтоматического управления.
Способ определения пространственного движения звеньев манипулятора, который реализуется указанным устройством, осу- шествляется следуюшим образом.
Одно из звеньев (звено 2) манипулятора 1 приводят в некотором начальном положении во взаимодействие через блок 3 чувствительных элементов с конечным звеном
4координатного измерительного устройства 5. В соответствии с заданным блоком 6 движением звеньев манипулятора блок 7 управления вырабатывает управляюа1ие воздействия на приводы этих звеньев.
При выполнении заданного пространственного движения манипулятора возникает смеш,ение его звена 2 относительно конечного звена 4 координатного измерительного устройства. Это смешение, т.е. рассогласование взаимных положений звена 2 манипулятора и конечного звена 4 координатного измерительного устройства, отсчитывается от некоторого их относительного положения, принятого за нулевое, и характери0 зуется многокомпонентным (в обш,ем случае шестимерным) вектором рассогласований, измеряемым блоком 3 чувствительных элементов. Процесс измерения может осуществляться без применения контрольного тела либо с применением контрольного тела
стандартной формы, скрепляемым со звеном 2 манипулятора или с конечным звеном 4 координатного измерительного устройства.
Информация с блока 3 используется для управления координатным измерительным устройством 5 и поступает на вычислительный блок 8. В этом блоке, который соединяет блок 3 чувствительных элементов и блок 9 управления координатного измерительного устройства, ведется преобразова5 ние информации от блока 3 и в соответствии с фактическими Смещениями конечного звена 4 относительно звена 2 определяются необходимые движения звеньев координатного измерительного устройства так, чтобы движение его конечного звена 4 соответст0 вовало перемещениям звена 2 манипулятора. По сигналам от блока 8 в блоке 9 управления вырабатываются управляющие воздействия на приводы звеньев координатного измерительного устройства 5.
5 Могут быть использованы различные алгоритмы функционирования блоков 8 и 9. В соответствии с одним из алгоритмов движением звеньев координатного измерительного устройства 5 управляют так, чтобы
., положение его конечного звена 4 непрерывно совмещалось с наперед заданным положением звена 2 манипулятора. В соответствии с другим алгоритмом управление ведется так, чтобы положение конечного звена 4 относительно звена 2 манипулятора
5 находилось в пределах рабочего диапазона блока чувствительных элементов.
В блоке 10 обработки информации ведется определение фактических координат положений звена 2 манипулятора 1, причем 0 используется информация от блока 3 чувствительных элементов и от датчиков координатных перемещений координатного измерительного устройства 5. Определяя и регистрируя фактические мгновенные пространственные положения звена 2 манипулятора, можно получить и зафиксировать законы движения этого звена или только значения координат этого звена при его движении в пространстве.
Формула изобретения
бы положение его конечного звена относительно звена манипулятора находилось в пределах рабочего диапазона блока чувствительных элементов.
4. Устройство для определения пространственного движения звеньев манипулятора, содержащего блок управления, приводы и исполнительный орган, включающее в себя блок задания движений, блок обработки информации и координатное из1.Спосо б определения пространственного движения звеньев манипулятора, заключающийся в том, что, с помощью управляемого координатного измерительного устройства, имеющего возможность взаимодействия с одним из звеньев манипулятора посредством блока чувствительных элементов, определяют фактические координаты
положений звена манипулятора как совокуп- Ю мерительное устройство, конечное звено ко- ность измерений координатного измеритель- торого имеет возможность взаимодействия кого устройства и блока чувствительных с одним из звеньев манипулятора с помощью элементов, отличающийся тем, что, с целью блока чувствительных элементов, выход ко- расщирения функциональных возможностей торого связан с первым входом блока об- и упрощения, движением звеньев координат-. Работки информации, а его второй вход свя- ногр измерительного устройства управляют зан с датчиками координатного измери- по сигналам блока чувствительных элемен- тельного устройства, причем приводы коорди. тов в соответствии с перемещениями звена натного измерительного устройства связа- манипулятора.ны с выходом блока управления этого устройства, а выход блока задания движений
2.Способ по п. 1, отличающийся тем, 20 подключен к входу блока управления ма- что движением звеньев координатного изме- нипулятора, отличающееся тем, что, с целью
рительного устройства управляют так, чтобы положение его конечного звена непрерывно совмещалось с наперед заданным положением относительно звена манипулятора.
3. Способ по п. 1, отличающийся тем, что движением звеньев координатного измерительного устройства управляют так, чтобы положение его конечного звена относительно звена манипулятора находилось в пределах рабочего диапазона блока чувствительных элементов.
4. Устройство для определения пространственного движения звеньев манипулятора, содержащего блок управления, приводы и исполнительный орган, включающее в себя блок задания движений, блок обработки информации и координатное измерительное устройство, конечное звено ко- торого имеет возможность взаимодействия с одним из звеньев манипулятора с помощью блока чувствительных элементов, выход ко- торого связан с первым входом блока об- Работки информации, а его второй вход свя- зан с датчиками координатного измери- тельного устройства, причем приводы коорди. натного измерительного устройства связа- ны с выходом блока управления этого уст
упрощения и расщирения функциональных возможностей, оно дополнительно содержит вычислительный блок, вход которого связан с выходом блока чувствительных элементов, а выход - с входом блока управления координатного измерительного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля качества воспроизведения программы движения робота-манипулятора и устройство для его осуществления | 1985 |
|
SU1377179A1 |
| Стенд-тренажер для оценки качества задания программы перемещений манипулятора | 1987 |
|
SU1511111A1 |
| Устройство для определения параметров движения выходного звена манипулятора | 1991 |
|
SU1827344A1 |
| Стенд для контроля перемещений промышленных роботов-манипуляторов | 1987 |
|
SU1565675A1 |
| Стенд-тренажер для оценки качества задания программ управления промышленным роботом для сварки | 1985 |
|
SU1291387A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| Автоматизированное рабочее место измерения многомерного распределения магнитного поля | 2021 |
|
RU2775608C1 |
| Способ позиционно-силового управления автономным необитаемым подводным аппаратом с многостепенным манипулятором | 2023 |
|
RU2799176C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
Изобретение относится к области машиностроения и может быть использовано для определения пространственных движений звеньев манипуляторов различных типов - как с ручным управлением, так и автоматических. Целью изобретения является расширение функциональных возможностей и упрощение, которые достигаются за счет того, что появляется возможность определять не только предварительно заданные, но и заранее неизвестные законы пространственного движения звеньев манипулятора, а также исключается необходимость предварительного программного согласования движений двух машин - манипулятора и координатного измерительного устройства. Для этого одно из звеньев (например, схват 2) манипулятора 1 приводят в некотором начальном положении во взаимодействие через блок 3 чувствительных элементов с конечным звеном 4 координатного измерительного устройства 5. В соответствии с заданным блоком 6 движением звеньев манипулятора блок 7 управления вырабатывает управляющие воздействия на приводы этих звеньев. При выполнении заданного пространственного движения манипулятора возникает смещение его звена 2 относительно конечного звена 4 координатного измерительного устройства. Это смещение измеряется блоком 3 чувствительных элементов. Информация с блока 3 используется в блоке 10 обработки информации для определения фактических координат положений звена 2 манипулятора, а также отводится для целей управления координатным измерительным устройством и поступает на вычислительный блок 8. По сигналам от блока 8 в блоке 9 управления вырабатываются управляющие воздействия на приводы звеньев координатного измерительного устройства 5. 2 с. и 2 з.п. ф-лы, 1 ил. (Л со 05 4 05 О5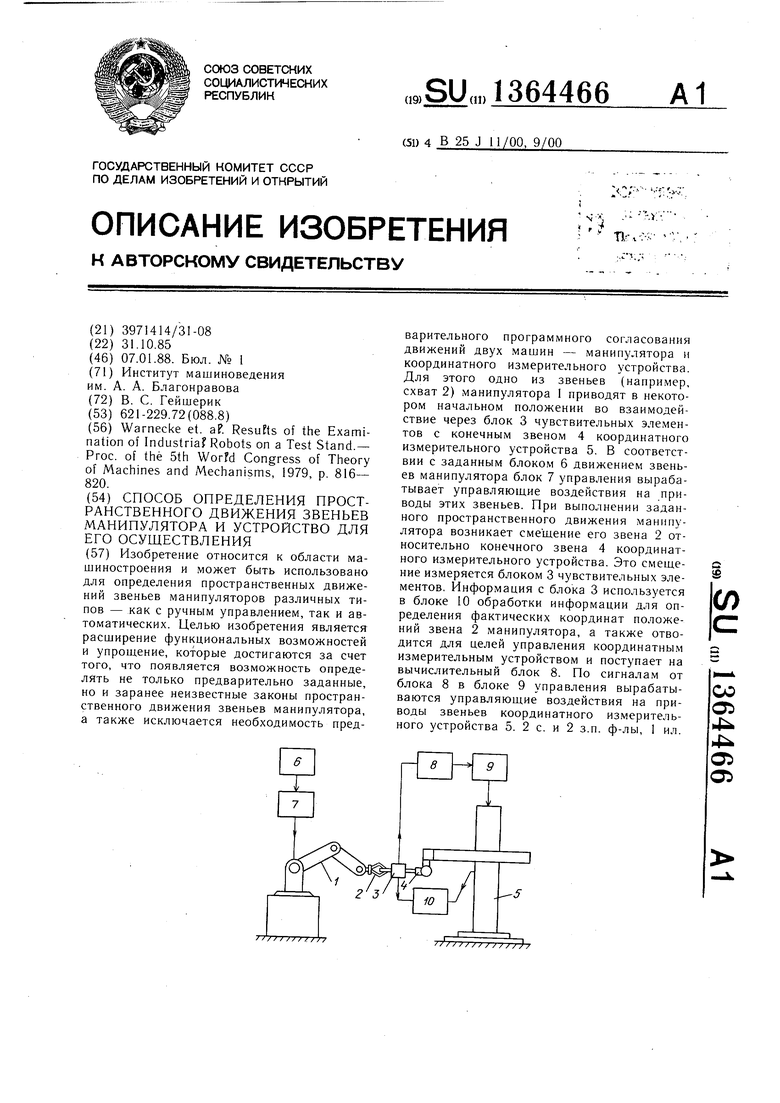
| Warnecke et | |||
| аР | |||
| ResuEts of the Examination of Industrial Robots on a Test Stand.- Proc | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Топка генеративного типа для мелкого топлива | 1923 |
|
SU816A1 |
