(Л С

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕЛИНЕЙНОСТИ КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА С КОРРЕКТИРУЮЩИМИ ЗВЕНЬЯМИ | 1988 |
|
RU1579231C |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ НЕЛИНЕЙНОСТИ ХАРАКТЕРИСТИКИ КОМПЕНСАЦИОННЫХ АКСЕЛЕРОМЕТРОВ С МАГНИТОЭЛЕКТРИЧЕСКИМ ОБРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1985 |
|
SU1344052A1 |
| Способ компенсации нелинейности акселерометра | 1975 |
|
SU690395A1 |
| Способ определения величины нелинейности характеристики акселерометров с обратным преобразователем | 1974 |
|
SU522471A2 |
| УСТРОЙСТВО АНАЛОГОВОГО ДАТЧИКА УГЛА ФАЗОВОГО СДВИГА МЕЖДУ НАПРЯЖЕНИЕМ И ТОКОМ | 2011 |
|
RU2492572C2 |
| ЭЛЕКТРОННАЯ СИСТЕМА КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 2016 |
|
RU2638919C1 |
| Способ измерения параметров нерезонансных трехэлементных двухполюсников | 1979 |
|
SU890270A1 |
| СПОСОБ ИЗМЕРЕНИЯ АМПЛИТУДНО-ЧАСТОТНЫХ ХАРАКТЕРИСТИК ПОДВИЖНЫХ ЭЛЕМЕНТОВ МИКРОМЕХАНИЧЕСКИХ УСТРОЙСТВ | 2011 |
|
RU2488785C1 |
| Способ определения времени групповой передачи четырехполюсников и устройство для его осуществления | 1985 |
|
SU1270742A1 |
| АКСЕЛЕРОМЕТР | 2013 |
|
RU2541716C1 |
Изобретение относится к области измерительной техники. Цель изобретения - повышение точности определения нелинейности акселерометра. Для измерения нелинейности акселерометр устанавливают последовательно в различные положения относительно направления ускорения силы тяжести, по обмотке обратного преобразователя пропускают переменный ток и измеряют вызванное переменным током изменение постоянного выходного сигнала акселерометра. Переменный ток для испытаний задают на двух различных частотах, замеряют при этом фазовые сдвиги между возмущающим переменным током и токами обратного преобразователя и нагрузочного резистора. Значение частот находят из условия равенства суммы указанных фазовых сдвигов 90 и 180°. 1 ил.
Изобретение относится к измерительной технике и можеч быть использовано для контроля компенсационных акселерометров с магнитоэлектрическим обратным преобразователем.
Целью изобретения является повышение точности определения нелинейности акселерометра.
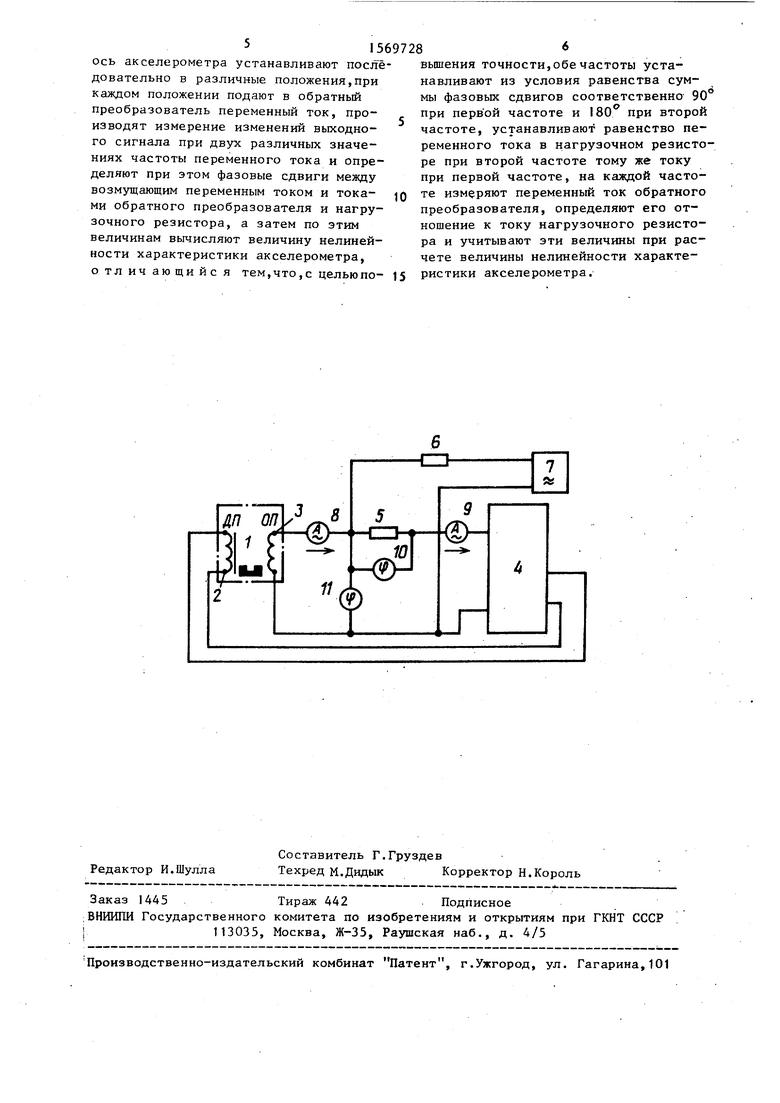
На чертеже приведена схема устройства, реализующего предлагаемый способ.
Устройство содержит чувствительный элемент 1 с датчиком 2 положения и обратным преобразователем 3. Чувствительный элемент 1 через датчик 2 положения, усилитель 4 и обратный пре- образбватель 3 охвачен обратной связью. В цепь обратного преобразователя включен нагрузочный резистор 5. Параллельно обмотке обратного преобразователя через балластный резистор 6 подключен генератор 7 переменной ЭДС. Последовательно с обратным преобразователем 3 и нагрузочным резистором 5 включены соответственно два амперметра 8 и 9. К нагрузочному резистору 5 подключен фазометр 10, а параллельно обратному преобразователю 3 - фазометр 1 1.
При воздействии вибрационных ускорений на акселерометр происходит детектирование переменного выходного момента обратного преобразователя, вызванное нелинейностью его характеристики. Детектирование вызывает изменение постоянной составляющей тока обратного преобразователя и появление погрешности. Вибрационные ускорения
сд
О5
со | ю
00
имитируются подачей через обмотку обратного преобразователя переменного тока, изменяющегося по гармоническому закону.
Нелинейность обратного преобразователя с несимметричной характеристикой определяется двумя составляющими - квадратичной и кубической. Такая нелинейность может быть описана математическим выражением
да - р3а3, где ла - нелинейность акселерометра;
а - измеряемое ускорение; р и PJ- коэффициенты квадратичной и кубической нелинейности соответственно.
Определение нелинейности акселерометра осуществляется следующим образом.
От генератора 7 подают в обратный преобразователь 3 переменный ток и измеряют фазовые сдвиги токов нагрузочного резистора и обратного преобразователя относительно тока генератора фазометрами 10 и 11 соответственно. Изменением задающей частоты генератора добиваются равенства суммы указанных фазовых сдвигов 90 . На найденной таким образом частоте регулировкой выходного напряжения генератора 7 устанавливают по амперметру 9 ток нагрузочного резистора, соответствующий выбранной амплитуде гармонического ускорения; и измеряют ток
(,(ae) +4VWl(-a)J -(ао) + ) (n«- 1)
k.,)
)t( 3-n«) + D5VWi(a0) -dVWi(-ae)(n )
3k
,(2пг+ пг- п.,)
п. и п, отношение токов обратного преобразователя к то- 45 кам нагрузочного резистора соответственно при первой и второй частотах с генератора;
k. крутизна преобразования
по току акселерометра; а«- амплитуда переменного
ускорения, соответствующая заданному току нагрузочного резистора. В способе отсутствует вычисление частот, переменного тока при испытаниях и связанные с этими вычислениями погрешности, вызванные ошибками в
0
5
0
5
обратного преобразователя с помощью амперметра 8.
Измеряют постоянные выходные сигналы акселерометра при воздействии постоянных ускорений силы тяжести ав и-а0 при наличии и отсутствии переменного тока от генератора 7. Находят приращения постоянных сигналов акселерометра, возникающих в результате подачи переменного тока dV а,(а0) и ЛУсиД-ар) соответственно. Задание постоянных ускорений силы тяжести осуществляют ориентацией оси чувствительности акселерометра по направлению действия ускорения и против него, для чего акселерометр разворачивают на 180°.
Затем изменяют частоту переменного тока от генератора 7 и проводят измерение фазовых сдвигов фазометрами 0 и 11. Изменением частоты генератора добиваются равенства суммы фазовых сдвигов 180°. При найденной частоте изменением напряжения с генератора устанавливают ток нагрузочного резистора 5 по амперметру 9, соответствующий выбранной амплитуде ускорения. Измеряют ток обратного преобразователя 3 по амперметру 8. Аналогично для новой частоты определяют приращения постоянных сигналов акселерометра 4VWl(a) H4Vw(ap).
Коэффициенты р2 ир, вычисляют по математическим выражениям
ао)
пУ)
Wi(a
определений степени демпфирования и собственной частоты акселерометра. Операции вычисления необходимых для определения нелинейности частот заменена экспериментальным определением частот по условиям равенства суммы фазовых сдвигов тока в нагрузочном резисторе тока обратного преобразователя.
Формула изобретения
Способ определения величины нелинейности характеристики акселерометров с обратным преобразователем, заключающийся в том, что измерительную
ось акселерометра устанавливают последовательно в различные положения,при каждом положении подают в обратный преобразователь переменный ток, производят измерение изменений выходного сигнала при двух различных значениях частоты переменного тока и определяют при этом фазовые сдвиги между возмущающим переменным током и токами обратного преобразователя и нагрузочного резистора, а затем по этим величинам вычисляют величину нелинейности характеристики акселерометра, о тл ич аю щи йс я тем,что,с цельюпоНГ в-Иэ-Кr&s
1569728
0
5
вышения точности,обе частоты устанавливают из условия равенства суммы фазовых сдвигов соответственно 90° при первой частоте и 180° при второй частоте, устанавливают равенство переменного тока в нагрузочном резисторе при второй частоте тому же току при первой частоте, на каждой частоте измеряют переменный ток обратного преобразователя, определяют его отношение к току нагрузочного резистора и учитывают эти величины при расчете величины нелинейности характеристики акселерометра.
1
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ НЕЛИНЕЙНОСТИ | 0 |
|
SU295086A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ определения нелинейности характеристики аксселерометров с обратным преобразователем | 1973 |
|
SU479033A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
