Изобретение относится к приборостроению и может быть использовано при исследованиях и испытаниях компенсационных кселерометров с магнитоэлектрическим обратным преобразователем.
Цель изобретения повышение точности определения нелинейности характеристики акселерометра.
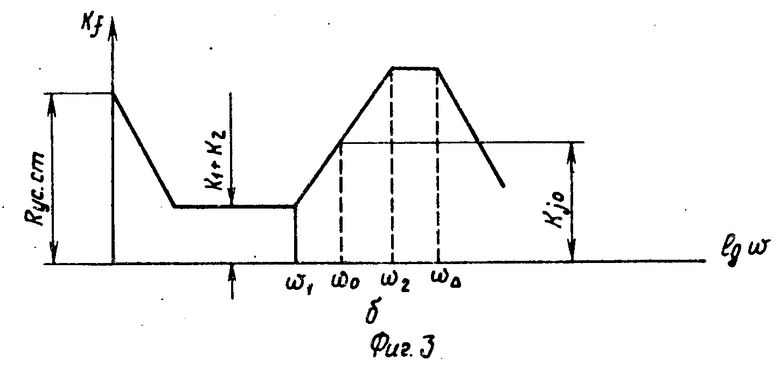
На фиг. 1 показана структурная схема следящей системы компенсационного акселерометра; на фиг.2 электрическая схема усилителя следящей системы акселерометра; на фиг.3 амплитудная частотная характеристика усилителя следящей системы акселерометра; на фиг.4 схема измерения токов обратного преобразователя и нагрузочного резистора; на фиг.5 схема измерения токов электрического имитатора обратного преобразователя и нагрузочного резистора; на фиг. 6 векторная диаграмма токов в нагрузочном резисторе; на фиг.7 векторная диаграмма токов в обмотке обратного преобразователя.
Реализацию предлагаемого способа рассматривают на примере исследования маятникового компенсационного акселерометра.
При наличии ускорения "а" по измерительной оси прибора его маятниковый чувствительный элемент 1 (имеющий маятниковость ml) отклоняется под действием инерционного момента Мин=mla на угол ϕ (фиг.1). Перемещение чувствительного элемента измеряется и преобразуется в электрический сигнал U датчиком перемещения 2. После усиления и преобразования в усилителе 3 в компенсационную катушку обратного преобразователя 4 поступает ток Iоп, создающий компенсационный момент Мk. Ток, проходящий через компенсационную катушку обратного преобразователя, одновременно является и выходным сигналом Iвыхакселерометра. Подача переменного тока в компенсационную катушку обратного преобразователя эквивалентна введению возмущающего воздействия Imsin ωt, где Im амплитуда тока от внешнего источника питания.
Для пояснения достижения указанной цели изобретения целесообразно проанализировать, как образуется нелинейность, какие параметры акселерометра влияют на нее, как они связаны между собой при измерении статических ускорений и при подаче переменного тока. Одним из факторов, вызывающих нелинейность, является соленоидальный эффект в обратном преобразователе (1).
Вторым фактором, вызывающим нелинейность, является неоднородность магнитной индукции "В" в зазоре обратного преобразователя в функции от перемещения чувствительного элемента.
Эта составляющая нелинейности вызывается размагничивающим действием тока компенсационной катушки обратного преобразователя и неравномерностью поля постоянного магнита вдоль воздушного зазора магнитной системы преобразователя из-за наличия потоков выпучиванимя, нарушения правильности геометрических размеров воздушного зазора.
Обе эти причины в сумме приводят к тому, что магнитная индукция "В" в зазоре преобразователя непостоянна по перемещению чувствительного элемента и может быть представлена в виде многочлена, ограниченного в первом приближении членом со вторым порядком перемещения чувствительного элемента
В=Во(1- γ1 ϕ γ2 ϕ2 )
где Во индукция в исходном положении чувствительного элемента;
γ1 и γ2- коэффициенты.
Из условия равновесия маятника и вследствие указанного закона изменения индукции ток преобразователя Iоп будет не пропорционален ускорению и отличаться от линейной зависимости на величину
Δ Iоп K1 a ( γ1 ϕ + γ2 ϕ2 )
где а ускорение;
К1 крутизна статической градуировочной характеристики акселерометра.
В свою очередь для идеального акселерометра
Uоп=К1а, ϕ ζ a
где ζ угловое перемещение чувствительного элемента на единицу ускорения.
Найдя суммарную погрешность в измерении ускорения от обоих указанных факторов, получают выражение для нелинейности акселерометра
Δa  +
+  p
p
где Мп паразитный момент от соленоидального эффекта;
m масса чувствительного элемента;
l расстояние от оси подвеса до центра инерции;
pϕ2 и pϕ3- квадратичный и кубический коэффициенты нелинейности, зависящие от перемещения чувствительного элемента;
p12 и p13 квадратичный и кубический коэффициенты нелинейности, зависящие от тока преобразователя;
p2 и p3 суммарные квадратичный и кубический коэффициенты нелинейности.
pϕ2 γ1 ζ pϕ3 γ2 ζ2
p p
p
где lм расстояние от оси подвеса до оси симметрии катушки обратного преобразователя;
G1 и G2 коэффициенты, зависящие от магнитных проводимостей в зазоре обратного преобразователя.
Таким образом, нелинейность акселерометра зависит от тока обратного преобразователя и перемещения чувствительного элемента. Находят их выражения при измерении статических ускорений и при подаче переменного тока в обратный преобразователь.
Решения для установившихся значений тока обратного преобразователя Iоп.ст и перемещения чувствительного элемента ϕст при измерении входного статического ускорения а имеют вид
Iоп.ст=  a,
a,
ϕст= 
где Коп коэффициент преобразования обратного преобразователя;
Кдп коэффициент преобразования датчика перемещения;
Кf коэффициент преобразования усилителя, зависящий от частоты.
На собственной частоте ωoКf=Kfo.
В области нулевых частот Кf-Kст.ус.
При подаче возмущающего воздействия Imsin ωt в следящую систему акселерометра (фиг.1) получают следующие выражения для установившихся амплитуд тока обратного преобразователя Iопm и перемещения чувствительного элемента ϕm.
I =
=  , (1)
, (1)
где ε степень успокоения;
ωo собственная частота следящей системы акселерометра.
ε  (2)
(2)
ω0=  (3)
(3)
ϕm= 
 (4)
(4)
Из выражений (1) и (4) видно, что при подаче переменного тока в обмотку обратного преобразователя амплитуды тока обратного преобразователя и перемещения чувствительного элемента зависят от частоты: при ω 0 Iопm 0 а при ω >> ωo ϕm 0. Между ω o и ω ∞ есть такая частота переменного тока, где нелинейность акселерометра такова, как и при измерении статического ускорения.
Для нахождения этой частоты приравнивают ток обратного преобразователя при изменении статического ускорения амплитуде тока при подаче переменного тока в обратный преобразователь и приравнивают статическое перемещение чувствительного элемента амплитуде перемещения при подаче переменного тока
 (5)
(5)
 ×
×  (6)
(6)
Поделив (5) на (6) и применив формулу (3), получают
Kω , (7)
, (7)
где
K 
Амплитудная частотная характеристика усилителя имеет вид, изображенный на фиг. 3. В области малых частот коэффициент преобразования усилителя Кf= Kус.ст. На собственной частоте акселерометра ωo Кf=Kfo. Минимальный коэффициент преобразования
Кмин=К1+К2,
где K1=  K2=
K2=  .
.
Коэффициент преобразования усилителя Кf после диапазона малых частот в соответствии со схемой фиг.2 равен
Kf=  (8)
(8)
где b, c, d, q, h константы усилителя.
Принято, что условие (7) удовлетворяется на частоте ω λ ωo где λ расчетный коэффициент.
Тогда, подставив в (7) значение Кf из (8) и ω λ ωo получают уравнение для определения коэффициента λ а следовательно, и частоты переменного тока, который нужно подавать в компенсационную катушку обратного преобразователя.
Определение ωo и ε производится следующим образом.
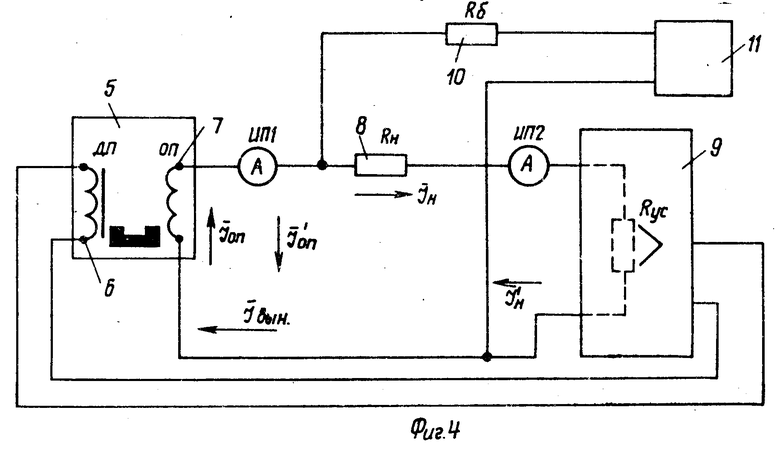
В схеме измерения токов (фиг.4), в которую входит датчик 5 акселерометра с датчиком перемещения (ДП) 6 и обратным преобразователем (ОП) 7, нагрузочный резистор Rн 8, усилитель 9, параллельно с компенсационной катушкой обратного преобразователя через балластный резистор Rб 10 включается источник 11 переменного тока. При этом выбирается Rб>>Rоп, где Rоп сопротивление компенсационной катушки.
Через компенсационную катушку обратного преобразователя протекают токи I'оп от источника переменного тока и Iвын вынужденный ток следящей системы при наличии переменных моментов от тока I'оп. Результирующий ток в компенсационной катушке обратного преобразователя =
=  .
.
Этот ток измеряется амперметром ИП1.
Чeрез нагрузочный резистор протекают токи Iн' от источника переменного тока и Iвын. Результирующий ток в нагрузочном резисторе равен =
=  +
+
Он измеряется амперметром ИП2.
Далее в схеме измерения токов отключается компенсационная катушка обратного преобразователя и вместо нее включается имитатор обратного преобразователя, которым может быть дополнительный резистор с таким же сопротивлением, что и у компенсационной катушке обратного преобразователя, либо комплексная нагрузка с активной и реактивной составляющими, равными соответствующим составляющим компенсационной катушки обратного преобразователя. В качестве комплексной нагрузки возможно также включение компенсационной катушки обратного преобразователя технологического датчика акселерометра.
На фиг.5 представлена схема изменения с замещением компенсационной катушки обратного преобразователя испытуемого датчика акселерометра ее электрическим имитатором 12. Тогда амперметром ИП1 измеряется ток I'оп, амперметром ИП2 ток Iн' от источника переменного тока.
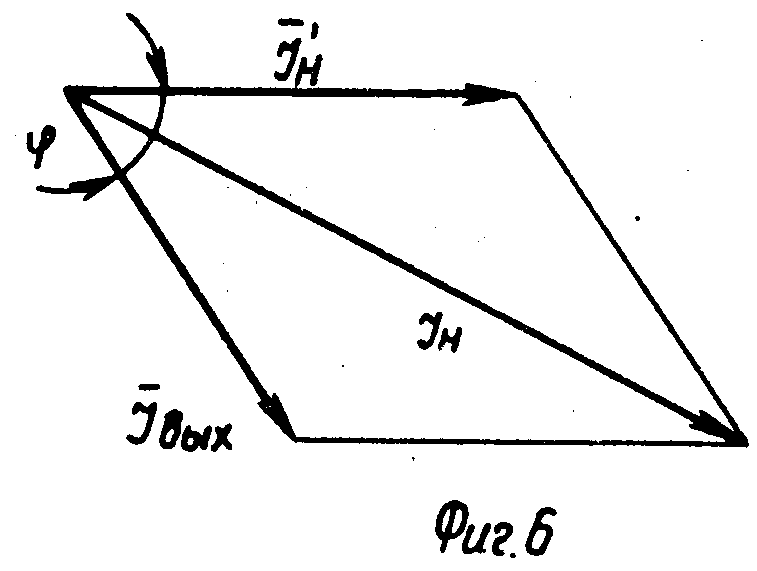
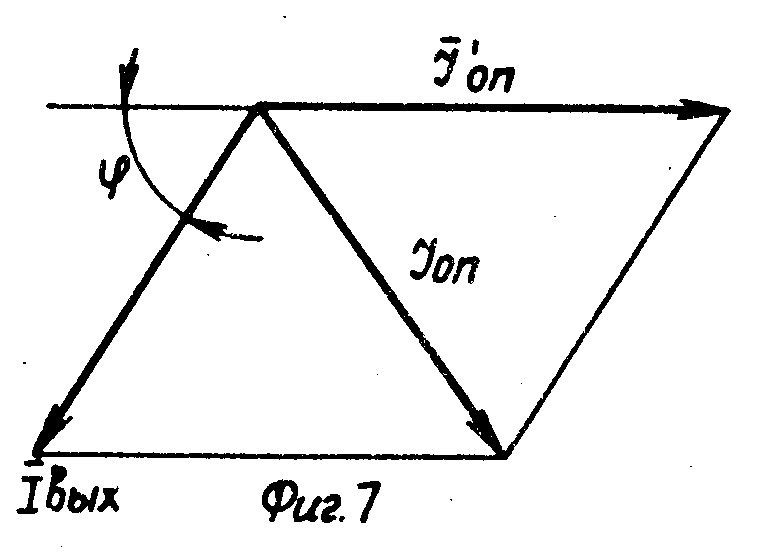
В соответствии с векторными диаграммами токов в нагрузочном резисторе (фиг.6) и обратном преобразователе (фиг.7) в замкнутой системе
Iн= 
где ϕ угол между токами Iн и Iвын.
Iоп= 
Отсюда определяются вынужденный ток и фаза вынужденного движения
Iвын=  (9)
(9)
ϕ arccos (10)
(10)
Так как выходной ток акселерометра пропорционален ускорению, то значение Iвын определяет величину измеряемого акселерометром переменного входного ускорения.
Подавая в компенсационную катушку обратного преобразователя токи различной частоты, по вычисленным в формулах (9) и (10) значениям вынужденного тока и фазового сдвига определяются амплитудная и фазовая частотные характеристики.
По амплитудной и фазовой частотным характеристикам определяются ωo и ε Частота, при которой фаза составляет 90о, является собственной частотой ωo.
Степень демпфирования ε определяется как
ε  ,
,
где А ωo величина амплитудной характеристики при частоте ωo;
А ωн величина амплитудной характеристики на ее горизонтальном участке.
Подав в компенсационную катушку обратного преобразователя переменный ток частоты, определенной по λ добиваются равенства токов обратного преобразователя при измерении статических ускорений и подаче переменного тока, равенства перемещений чувствительного элемента при статическом ускорении и подаче переменного тока, а это приводит к тому, что при подаче переменного тока в обратный преобразователь определяется такая же нелинейность характеристики акселерометра, как и при измерении статических ускорений.
Использование этого способа повышает точность определения нелинейности статической градуировочной характеристики акселерометра. Повышение точности определения нелинейности повышает в свою очередь точность измерения ускорения акселерометром.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕЛИНЕЙНОСТИ КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА С КОРРЕКТИРУЮЩИМИ ЗВЕНЬЯМИ | 1988 |
|
RU1579231C |
| Способ компенсации нелинейности акселерометра | 1975 |
|
SU690395A1 |
| Компенсационный акселерометр | 1990 |
|
SU1795374A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2096785C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2001 |
|
RU2210781C2 |
| ЭЛЕКТРОННАЯ СИСТЕМА КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 2016 |
|
RU2638919C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1996 |
|
RU2107301C1 |
| Способ определения величины нелинейности характеристики акселерометров с обратным преобразователем | 1988 |
|
SU1569728A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| АКСЕЛЕРОМЕТР | 2011 |
|
RU2461838C1 |
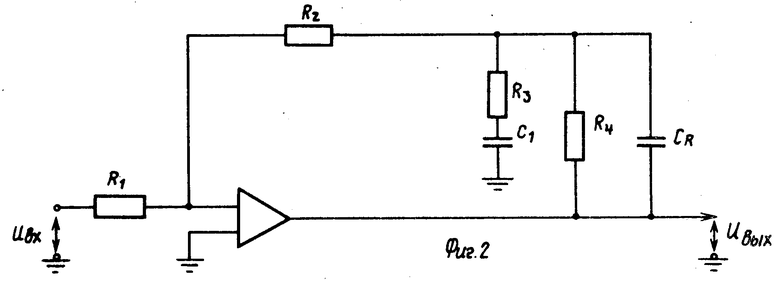

Изобретение относится к приборостроению. Цель изобретения - повышение точности определения нелийнейноости характеристики акселерометра. При наличии ускорения по измерительной оси прибора его маятниковый чувствительный элемент 1 отклоняется под действием инерционного момента на определенный угол. Перемещение чувствительного элемента 1 измеряется и преобразуется в электрический сигнал датчиком 2 перемещения. После усиления и преобразования в усилителе 3 в компенсационную катушку обратного преобразователя 4 поступает ток, создающий компенсационный момент. Подав в компенсационную катушку обратного преобразователя 4 переменный ток частоты, добиваются равенства токов обратного преобразователя при изменении статических ускорений и подаче переменного тока, а также равенства перемещений чувствительного элемента 1. 7 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ НЕЛИНЕЙНОСТИ ХАРАКТЕРИСТИКИ КОМПЕНСАЦИОННЫХ АКСЕЛЕРОМЕТРОВ С МАГНИТОЭЛЕКТРИЧЕСКИМ ОБРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ путем подачи электрического сигнала переменного тока в компенсационную катушку обратного преобразователя, измерения выходных сигналов постоянного тока в акселерометре и определения нелинейности по приращениям сигналов постоянного тока, отличающийся тем, что, с целью повышения точности определения нелинейности характеристики акселерометров с усилителем следящей системы, включающим дифференцирующее звено и сглаживающий фильтр, сначала подают в компенсационную катушку обратного преобразователя электрический сигнал переменного тока в диапазоне частот полосы пропускания акселерометра, измеряют сигналы переменного тока в обратном преобразователе и нагрузочном резисторе акселерометра, замещают обратный преобразователь в следящей системе акселерометра его электрическим имитатором, повторно подают в имитатор электрический сигнал переменного тока, измеряют электрические сигналы переменного тока в имитаторе и нагрузочном резисторе, по измеренным сигналам переменного тока в обратном преобразователе, нагрузочном резисторе и электрическом имитаторе определяют собственную частоту ωo следящей системы и степень демпфирования ε акселерометра, после чего подают в компенсационную катушку обратного преобразователя электрический сигнал переменного тока частоты w = λωo, где λ коэффициент, определяемый из условия эквивалентности возмущающих воздействий по отношению к исследуемой погрешности, и определяют нелинейность известным путем.
| Способ определения величины нелинейности характеристики акселерометров с обратным преобразователем | 1974 |
|
SU522471A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
