Код сигнала ЦАЛ, А Фиг.3
И чфетение относится к неразру- . -иному чнтролю и может быть использовав тая пзеделения качества поверхности ТПРЬ;чопроводягчих изделий.
Цель изобретения - повышение достоверности КОПТ1-МШ, достигается ггутем подавления вчияния метающего фактора на pe-зультат контроля.
На фиг. 1 предстявчена структур- ная схема устройства для реализации способа вихретокового контроля; на фиг. 2 - диаграммы напряжении, поясняющие алгоритм функционирования устройства; на фиг. 3 - зависимости, поясняющие сущность способа вихретокового контроля.
Устройство для осуществления способа содержит полый металлический корпус 1, расположенные в нем и сое- диненные последовательно управляемый генератор 2 высокой частоты, аттенюатор 3 и детектор 4, соединенные параллельно колебательный контур 5, выполненный в виде отрезка коаксиальной линии и катушки индуктивности (не показаны) , и цепь 6 отрицательного активного сопротивления, включенная между общим проводом и входом детектора 4, Между выходом детектора 4 и уп- равляемым входом генератора 2 высокой частоты подключены последовательно соединенные аналого-цифровой преобразователь (АЩТ) 7, микро-ЭВМ 8 и цифро аналоговый преобразователь (ДАЛ) 9, подключенный выходом к управляющему входу генератора 2. В состав микро- ЭВМ 8 входит индикатор 10.
Способ осуществляют следующим образом.
Генератор 2 высокой частоты вырабатывает электромагнитные колебания в области повышенных частот (0,03- 1,5 ГГц). Частота олебаний генератора 2 может изменяться в зависимости от сигнала на его управляемом входе. Колебания с выхода генератора 2 высокой частоты через аттенюатор 3 поступают на входы детектора 4 и колебательного контура 5, связанного с це- пью 6 отрицательного активного сопротивления, выполняющей роль умножителя добротности колебательного контура 5. Величина сигнала на колебательном контуре 5 зависит от его добротности и степени расстройки частот генератора 2 и колебательного контура 5, изменяется в зависимости от сигнала на управляемом входе генератора 2 высокой
частоты и выпрямляется детектором 4, АЦП 7 осуществляет преобразование сигнала с выхода детектора 4 в цифровой код и его занесение в оперативную память микро-ЭВМ 8 для последующей обработки. Вихретоковый преобразователь включают в параллельный колебательный контур 5, возбуждают его током повышенной частоты от генератора 2, осуществляют компенсацию собственного активного сопротивления контура и вносимого активного сопротивления вихретокового преобразователя с помощью цепи 6 отрицательного активного сопротивления и измеряют сигнап на выходе колебательного контура 5 с помощью детектора 4 и АЦП 7.
Порядок осуществления способа определяется программой работы микро- ЭВМ 8. На фиг. 2 показаны временная диаграмма работы микро-ЭВМ, изменение сигнала с выхода НАЛ, согласно которому изменяется частота тока возбуждения, и изменение сигнала с выхода детектора 4. В момент времени t происходит установка частоты генератора 2 устройства в исходное состояние на левом склоне резонансной характеристики колебательного контура. Этому состоянию соответствует сигнал А, АЦП 7 и сигнал U( детектора 4. В момент времени t. микро-ЭВМ 8 формирует начальное значение цифрового кода дискретной последовательности и выдает этот код в ЦАП 9. Этому состоянию соответствует сигнал А2 ЦАП 9. Согласно выданному коду изменяется частота генератора 2 повышенных частот, -а сигнал детектора 4 принимает значение U2. В момент времени t3 происходит ввод сигнала с детектора 4 в АЦП 7, его преобразование в цифровой код и ввод в память микро-ЭВМ 8. В момент времени t4 происходит сравнение введенного сигнала U2 с ранее введенным кодом сигнала U,. Если числовое значение нового кода больше предыдущего, то микро-ЭВМ формирует следующее значение цифрового кода дискретной последовательности для ввода в ЦАП 9. Процессы, происходящие в моменты времени t4,t,,t4, повторяются вновь. Если новый код сигнала U4 с выхода детектора 4 становится меньше предыдущего кода, это является признаком того, что достигнут резонанс. В следующий момент времени t
Г,
микро- ЧВМ 8 -1ПОМШ1 аот предыдущий код амплитуды сигнала „ и соответствующий ему код частоты А„ ,, вычисляет контролируемый параметр качества поверхности по ранее установленной функциональной зависимости, использующей найденное в цифровых кодах значениях резонансной частоты f и максимум U амплитуды сигнала.
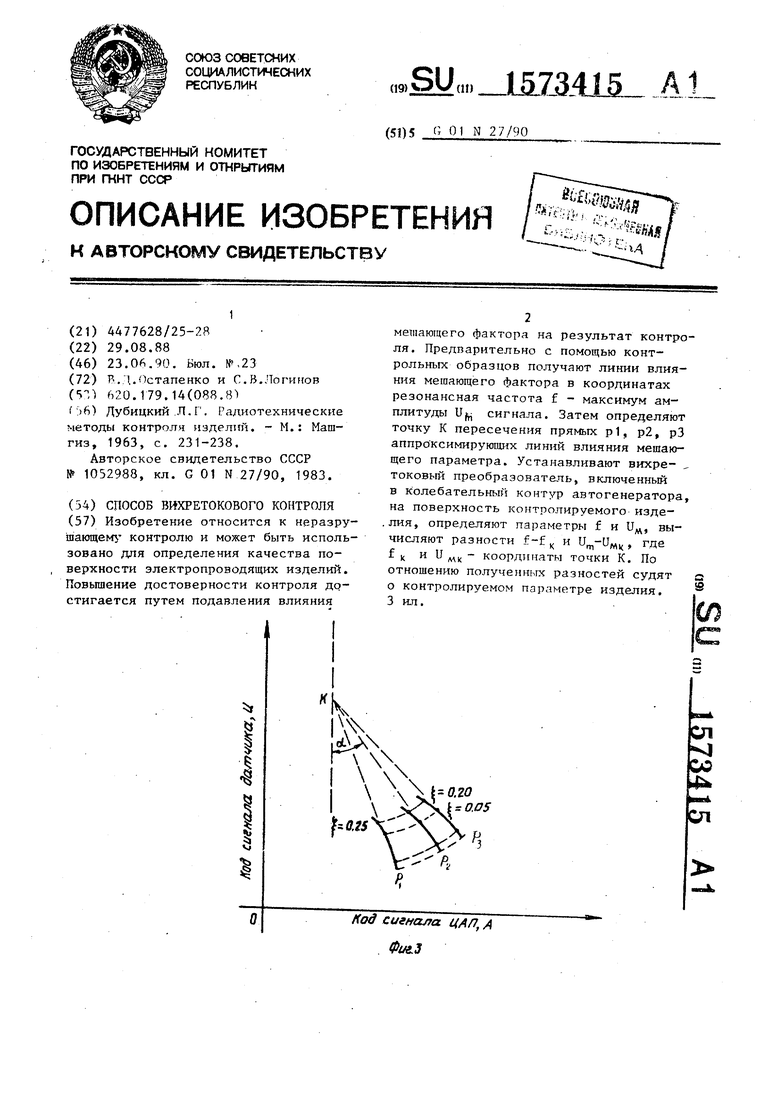
Требуемые функциональные зависимости получают следующим образом. Вихретоковый преобразователь устанавливают на поверхность контрольного образца с известной величиной контролируемого параметра. Изменяют подавляемый параметр, для различных значений подавляемого параметра определяют значения цифровых кодов, характеризующих максимум амплитуды U m сигнала и резонансную частоту f колебательного контура 5. В ортогональной системе координат, составленной из указанных цифровых кодов, строят линии влияния подавляемого параметра для изделий с различным значением контролируемого параметра в заданных пределах. Участки линий влияния подавляемого параметра аппроксимируют прямыми линиями и находят точку К их пересечения . Находят координаты f K и итк точки пересечения и их запоминают. Относительно координат точки пересечения находят приращения соответствующих цифровых кодов, а функциональную зависимость для вычисления контролир --мого параметра устанавли- рают в виде ношения приращения цифрового кода ма;.имума амплитуды сигнала на колебательном контуре к приращению соответствующего цифрового кода дискретной последовательности, характеризующего резонансную частоту.
Реализация способа применительно к решению задачи подавления влияния зазора h между вихретоковым преобразователем и контролируемым изделием при измерении толщины вакуумно-плаз °
меиного покрытия на ферромагнитной основе поясняется на фнг.З. Здесь Р, Р,,,- - линии влияния изменения обобщенного параметра зазора Ј 2h/D, D - диаметр преобразователя в пределах 0 - 0,25 для толщин покрытий 3,2, 5,1 и 8,1 мкм соответственно; К - точка пересечения линий влияния зазора.
Как следует из рассмотрения фиг.З, измеряемое значение толщины покрытия определяется как тангенс угла об и практически не зависит от изменения у в пределах 0-0,2.
Формула изобретения
Способ вихретокового контроля, заключающийся в том, что включают вихретоковый преобразователь в параллельный колебательный контур и возбуждают его монотонно изменяющимся по частоте током, компенсируют собственное активное сопротивление контура и ак-
тивное сопротивление, вносимое в вих- ретоковый преобразователь, регистрируют амплитудно-частотные характеристики колебательного контура и определяют резонансную частоту и второй информативный параметр в момент резонанса, отличающийся тем, что, с целью повышения достоверности контроля, в качестве второго информативного параметра выбирают максимальную амплитуду сигнала, получаемую на контуре в момент резонанса, предварительно с помощью контрольных образцов получают зависимости в координатах резонансная частота Ј„ - максимум амплитуды сигнала U при постоянных значениях измеряемого параметра объекта контроля и варьируемом мешающем параметре, определяют точку К линий влияния мешающего параметра с координатами fK, U MK,получают для контролируемого объекта разности значений f-fK и UMK-UM и по их отношению судят о контролируемом параметре объекта контроля.
Сигнал датчика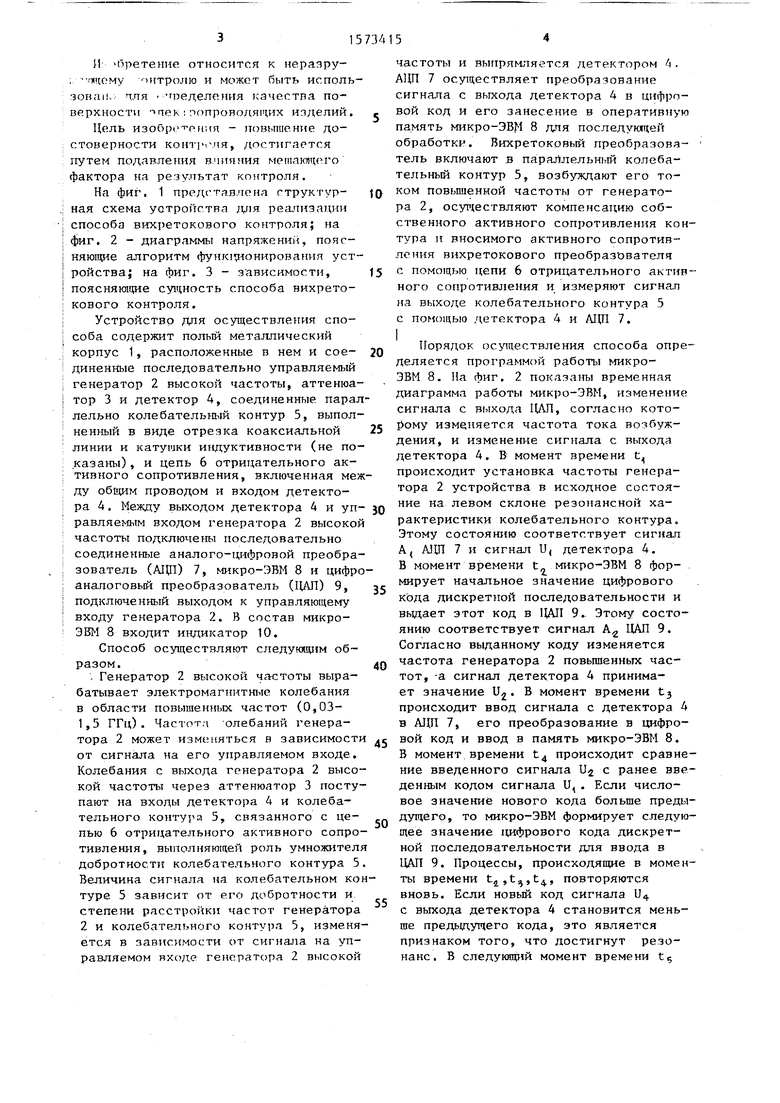
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель добротности колебательных систем | 1989 |
|
SU1718144A1 |
| УСТРОЙСТВО ДВУХПАРАМЕТРОВОГО КОНТРОЛЯ ТОЛЩИНЫ ЭЛЕКТРОПРОВОДНЫХ ПОКРЫТИЙ | 2013 |
|
RU2533756C1 |
| Устройство для определения физико-химических параметров материалов и веществ | 1990 |
|
SU1753387A1 |
| ВИХРЕТОКОВЫЙ СПОСОБ ДВУХЧАСТОТНОГО КОНТРОЛЯ ИЗДЕЛИЙ | 2000 |
|
RU2184931C2 |
| Способ вихретокового контроля качества сварных соединений и устройство для его осуществления | 1989 |
|
SU1652893A1 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2365910C2 |
| УСТРОЙСТВО ДЛЯ ВИХРЕТОКОВОГО КОНТРОЛЯ | 1996 |
|
RU2121672C1 |
| ДВУХПАРАМЕТРОВЫЙ СПОСОБ КОНТРОЛЯ ИЗДЕЛИЙ | 2006 |
|
RU2305280C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОЛЩИНЫ ПРОВОДЯЩЕГО ПОКРЫТИЯ С НЕПОСРЕДСТВЕННЫМ ОТСЧЕТОМ | 1995 |
|
RU2128818C1 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ МЕДНОЙ КАТАНКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2542624C1 |
Изобретение относится к неразрушающему контролю и может быть использовано для определения качества поверхности электропроводящих изделий. Повышение достоверности контроля достигается путем подавления влияния мешающего фактора на результат контроля. Предварительно с помощью контрольных образцов получают линии влияния мешающего фактора в координатах резонансная частота F - максимум амплитуды UM сигнала. Затем определяют точку K пересечения прямых P1, P2, P3 аппроксимирующих линий влияния мешающего параметра. Устанавливают вихретоковый преобразователь, включенный в колебательный контур автогенератора, на поверхность контролируемого изделия, определяют параметры F и UM, вычисляют разности F-F*00K и UM - UM*00K, где F*00K и UM*00K - координаты точки K . По отношению полученных разностей судят о контролируемом параметре изделия. 3 ил.