Фиг.1
11 с возможностью подъема-опускания приводом. Конвейеры 4 установлены с возможностью поворота приводом вокруг вертикальной оси. Устройство также содержит систему регулирования
15766094
положения конвейеров 4 в вертикальной плоскости, соединенных электрически с соответствующим механизмом установки скребкового конвейера 4 в рабочее положение. 1 з.п. ф-лы, 6 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЩЕБНЕОЧИСТИТЕЛЬНАЯ МАШИНА | 1995 |
|
RU2092644C1 |
| ЩЕБНЕОЧИСТИТЕЛЬНАЯ МАШИНА | 1995 |
|
RU2128753C1 |
| ЩЕБНЕОЧИСТИТЕЛЬНАЯ МАШИНА | 1995 |
|
RU2086726C1 |
| ЩЕБНЕОЧИСТИТЕЛЬНАЯ МАШИНА | 1995 |
|
RU2078868C1 |
| МАШИНА ДЛЯ РАСПРЕДЕЛЕНИЯ БАЛЛАСТА ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2009 |
|
RU2398061C1 |
| Щебнеочистительная машина | 2024 |
|
RU2839787C1 |
| МАШИНА ДЛЯ ОЧИСТКИ БАЛЛАСТА ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1995 |
|
RU2128754C1 |
| Щебнеочистительная машина | 1986 |
|
SU1461812A1 |
| МАШИНА ДЛЯ ВЫРЕЗКИ БАЛЛАСТА ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1996 |
|
RU2110634C1 |
| Щебнеочистительная машина Чекина | 1985 |
|
SU1300065A1 |


Изобретение относится к устройствам для вырезки и перераспределения балласта железнодорожного пути. Цель изобретения - расширение технологических возможностей устройства путем планировки поверхности балластной призмы с необходимым наклоном в поперечной плоскости. Устройство для вырезки балласта железнодорожного пути содержит раму 1 путевой машины, на которой смонтированы с обеих ее сторон параллельно продольной оси ковшовые элеваторы 2, установленные за ними и расположенные горизонтально конвейеры 3 для удаления вырезанного за торцами шпал загрязненного балласта. На раме 1 смонтированы скребковые конвейеры 4 с приводами 5, расположенные за элеваторами 2 по направлению работы устройства, и механизмы установки конвейеров 4 в рабочее положение, каждый из которых состоит из балки 6, закрепленной по концам шарнирно с возможностью ограниченного поворота в вертикальной плоскости приводом. Балка 6 поворачивается на подъемно-поворотных кронштейнах 8 и 9, закрепленных на установленных на раме 1 стойках 10 и 11 с возможностью подъема-опускания приводом. Конвейеры 4 установлены с возможностью поворота приводом вокруг вертикальной оси. Устройство также содержит систему регулирования положения конвейеров 4 в вертикальной плоскости, соединенных электрически с соответствующим механизмом установки скребкового конвейера 4 в рабочее положение. 1 з.п. ф-лы, 6 ил.
Устройство относится к устройствам для вырезки и перераспределения балласта и может быть использовано при ремонте и реконструкции железнодорожного пути, в частности для удаления загрязненного балласта из балластной призмы.
Цель изобретения - расширение технологических возможностей устройства путем планировки поверхности балластной призмы с необходимым наклоном в поперечной плоскости.
На фиг. 1. изображено устройство для вырезки балласта из призмы железнодорожного пути; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез В-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - принципиальная электрическая схема системы регулирования рабочего положения скребкового конвейера; на фиг. 6 - расчетная схема для определения величины корректировки подъема-опускания скребкового конвейера.
Устройство для вырезки балласта содержит раму 1 путевой машины, на которой смонтированы с обеих ее сторон параллельно продольной оси устройства ковшовые элеваторы 2, предназначенные для вырезки балласта за пределами торцов шпал и образования траншеи, установленные за ковшовыми элеваторами и расположенными горизонтально вдоль устройства конвейеры 3, предназначенные для удаления вырезанного за торцами шпал загрязненного балласта.
На раме 1 смонтированы скребковые конвейеры А с приводами 5, расположенные за элеваторами 2 по направлению работы устройства, и механизмы установки скребкового конвейера в рабочее положение, состоящее из балки 6, закрепленной по концам шар- нирно с возможностью ограниченного поворота в вертикальной плоскости приводом, представляющим собой гидроцилиндр 7. Балка 6 поворачивается, вокруг продольной оси на подъемно5
0
5
0
5
0
5
0
5
поворотных кронштейнах 8 и 9, закрепленных на установленных на раме 1 стойках 10 и 11 с возможностью подъема-опускания приводом 12. Конвейеры 4 установлены с возможностью поворота приводом вокруг вертикальной оси. Устройство также содержит систему регупирования положения скребкового конвейера 4 и поворота его относительно продольной оси балки 6, состоящую из подключенного к стабилизированному источнику 13 питания через корректор 14 блока 15 управления подъемом-опусканием балки 6, подсоединенного через задающий блок 16 к задатчику 17 положения пути, закрепленному на балке 6 и контактирующему посредством щупа 18 с рельсом 19, и блока 20 управления поворотом балки 6 вокруг продольной оси, соединенного через задающей блок 21 с датчиком 22 угла наклона балки 6 закрепленным на ней, причем блок 22 управления подключен к стабилизированному источнику 13 питания.
Блок 16 предназначен для установки в соответствии с проектом высоты подъема скребкового конвейера 4 и представляет собой потенциометр. Блок 21 предназначен для установки в соответствии с проектом угла наклона скребкового конвейера 4 в поперечной плоскости устройства и также представляет собой потенциометр.
Привод поворота балки 6 представляет собой гидроцилиндр 7, соединенный с одной стороны шарнирно с этой балкой, а с другой - с подъемно-поворотным кронштейном 8 посредством промежуточного кронштейна 23.
Корректор 14 состоит из потенциометра 24, закрепленного на корпусе датчика 22, и движка 25, закрепленного на оси 26 маятника 27, причем вход корректора 14 соединен с источником 13, а выход с блоком 15.
Устройство для выречки балласта из призмы железнодорожного пути работает следующим образом.
5
Ковшовый элеватор 2 вырезает балласт у торцов шпал и подает его на конвейер 3, который удаляет его за пределы устройства. Одновременно скребковый конвейер 4 вырезает балласт из под рельсо-шпальной решетки и подает его в траншею, образованую элеватором 2 у торцов шпал, при этом положение скребкового конвейера 4 в поперечной плоскости и по высоте устанавливают блоками 20 и 15 по задающей программе блоков 21 и 16. При движении устройства, установленного на путевой машине, по невыправленному пути возникают два ви отступлений положений скребкового конвейера от заданной высоты и заданного угла наклона в поперечной плоскости.
В первом случае вследствие подъема или опускания рамы 1 скребковый конвейер 4 и балка 6 смещаются относительно рельса 19, вызывая поворот щупа 18. При этом датчик 17 вы- рабатывает сигнал, поступающий в блок 15 управления, который включае привод 12, осуществляющий опускание или подъем скребкового конвейера 4. х При изменении проектного значения угла наклона скребкового конвейера 4 изменяется наклон балки 6 с установленным на ней датчиком 22 угла наклона, а ось 26 маятника 27 сохраняет свое положение, что приводит к смещению движка 25 вдоль потенциометра 24, это в свою очередь, приводит к изменению величины, сигнала, поступающего от выхода корректора 14 на вход блока 15 управления подъемом-опуска
нием, который осуществляет корректировку величины подъема скребкового конвейера 4.
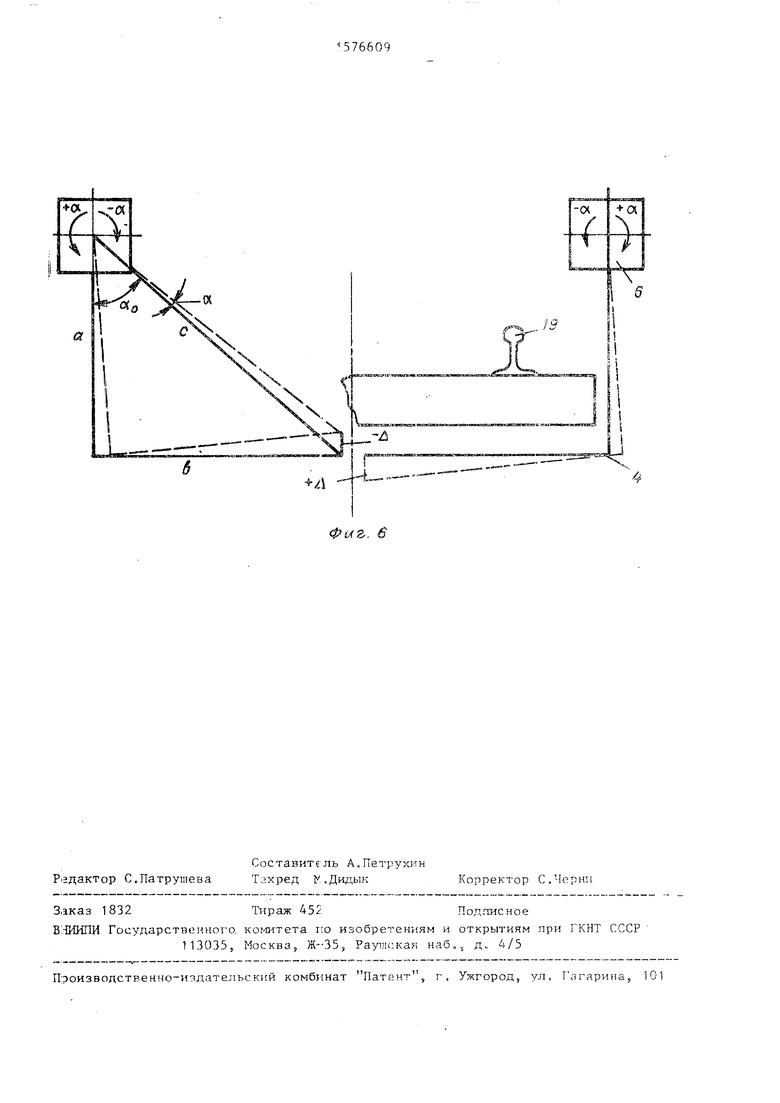
(Расчетный диапазон изменения угла наклона скребкового конвейера в поперечной плоскости составляет не более + 0,02 рад. Величина корректирующей подъемки (фиг. 6) определяется по формуле А C.CQS(O(O + oO -.с . cos о(0
или Д с (cos of0-cos oЈ- sin of 0 sin dj-cos e).
Учитывая, что для малых углов coscЈ 1 и sin d oi , получим
4 - (с - )- d - Ъ-оС, т.е. величина корректирующей подъем- ки пропорциональна изменению угла по- I ворота балки 6 вокруг продольной оси и не превышает величины + 30 мм.
5
0
5
0
Таким образом, в устройстве изменения угла наклона скребкового конвейера с одновременной корректировкой его положения по высоте расширяет технологические возможности устройства за счет планировки балластной призмы под шпалами в поперечной плоскости с необходимым наклоном. Кроме того, при ремонте и реконструк- ции пути часто возникает необходимость изменения наклона пути в поперечной плоскости, величина которого определяется расчетным путем в зависимости от радиуса кривой и планируемой скорости движения поездов после ремонта пути. Причем придание расчетного наклона поверхности балластной призмы путем сравнивания возвращающего в путь рыхлого балласта не обеспечивает необходимой устойчивости пути после его ремонта. Обеспечение по задающей программе расчетного наклона поверхности балластной призмы под шпалами непосредственно при вырезке балласта существенно повышает устойчивость пути и равноупругость балластной призмы в период ее стабилизации после ремонта и реконструкции пути.
Формула изобретения
5
0
5
0
5
в вертикальной плоскости, с.вязан- ными с соответствующим механизмом установки скребкового конвейера в рабочее положение, каждый из которых включает в себя балку, несущую скребковый конвейер, смонтированную на раме машины параллельно ее продольной оси посредством подъемно-поворотных кронштейнов и установленную t возможностью ограниченного поворота приводом вокруг продольной оси.
г{
К
Б-Б
и корректор положения балки, состоящий из закрепленного на указанном корпусе потенциометра и движка, установленного на оси маятника, при этом датчик угла наклона балки через задающий угол ее наклона блок соединен с - блоком управления поворотом балки, который через корректор соединен со стабилизированным источником питания , а датчик положения пути через задающий подъемнику блок подключен к блоку управления подъемом-опусканием балки, который через корректор соединен со стабилизированным источником питания.
А
TT
К
Фиг. 2
Фиъ. 3
Фиъ.Ч
Фиъ.5
Фиг. 6
| Устройство для вырезки балласта из шпальных ящиков | 1984 |
|
SU1201386A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
