Изобретение относится к электротехнике, в частности к автоматизированным электроприводам постоянного тока, и может- быть использовано в приводах многокоординатных механизмов.
Целью изобретения является улучшение энергетических характеристик электропривода за счет изменения его энергетического состояния в тормозных режимах при требуемой динамической точности.
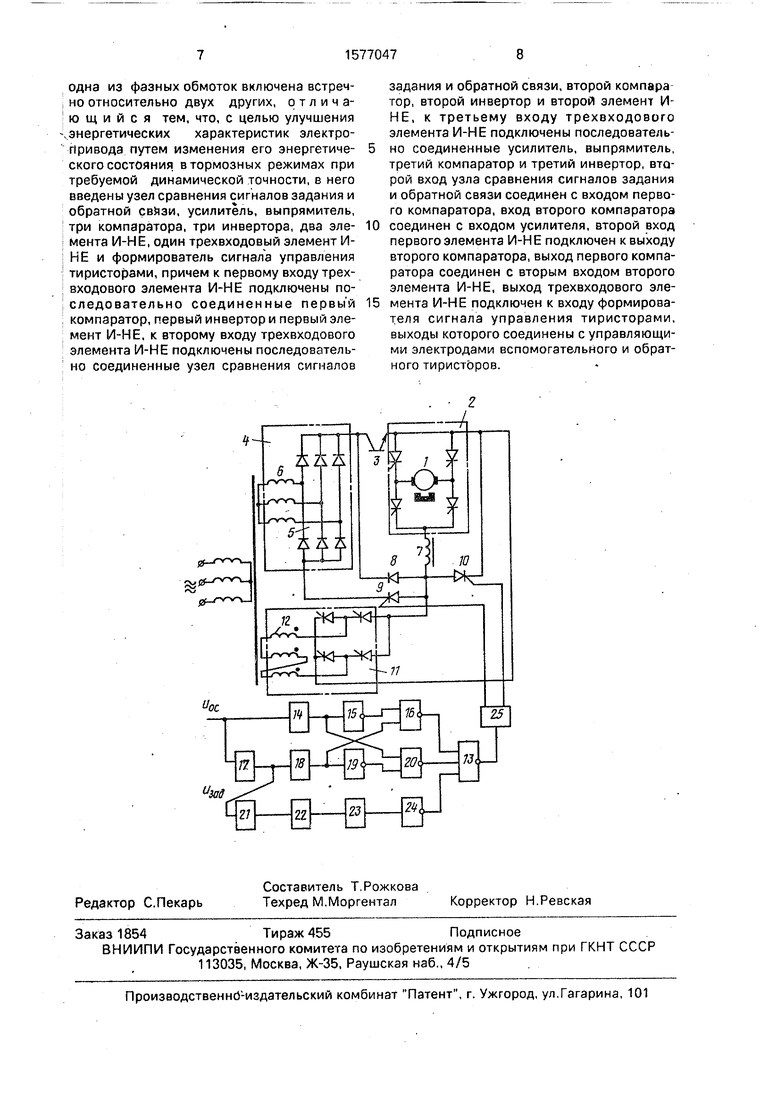
На чертеже представлена схема электропривода.
Электропривод постоянного тока содержит электродвигатель 1, якорная обмотка которого включена в диагональ тиристорного реверсора 2, первый вывод другой диагонали которого соединен через транзисторный ключ 3 с положительным выводом источника 4 постоянного тока, выполненного в виде трехфазного выпрямителя 5, подключенного к вторичной обмотке 6 трехфазного трансформатора. Второй вывод другой диагонали тиристорого реверсора 2 через сглаживающий дроссель 7 подключен к анодам диода 8, вспомогательного и обратного тиристоров 9 и 10, Катод диода 8 соединен с положительным выводом источника 4 постоянного тока. Катод обратного тиристора 10 подключен к первот му выводу другой диагонали тиристорного реверсора 2. Катод вспомогательного тиристора 9 соединен с отрицательным выводом источника 4 постоянного тока. Общий анод однофазного тиристорного моста 11 подключен к аноду обратного тиристора 10, общий катод - к катоду обратного тиристора 10. В диагональ переменного тока одноел 1
4
о vi
фазного тиристорного моста 11 включена дополнительная вторичная обмотка 12 трансформатора, выполненная по схеме разомкнутого треугольника, причем одна из фазных обмоток включена встречно отйоси- тельно двух других. К первому входу трех- входового элемента И-НЕ 13 подключены последовательно соединенные первый компаратор 14, первый инвертор 15 и первый элемет И-Н Е 16. К второму входу трехвходо- вого элемента И-НЕ 13 подключены последовательно соединенные узел 17 сравнения сигналов задания и обратной связи, второй компаратор 18, второй инвертор 19 и вторрй элемент И-НЕ 20, К третьему входу трехвхо- дового элемента И-НЕ 13 подключены последовательно соединенные усилитель 21, выпрямитель 22, третий компаратор 23 и третий инвертор 24. Выход трехвходового элемента 13 подключен к входу формирователя 25 сигналов управления тиристорами, выходы которого соединены с управляющими электродами вспомогательного и обратного тиристоров 9 и 10.
Электропривод работает следующим образом.
Автоматическая подстройка энергетического состояния электропривода при требуемой динамической -точности осуществляется за счет выбора и автоматического переключения регулируемых тормозных режимов в процессе торможения электропривода в функции допустимой динамической ошибки, т.е. в зависимости от ее величины в электроприводе реализуется энергетически наиболее выгодный тормозной режим. Силовая часть электропривода представляет собой импульсный преобразователь, построенный на базе изменяемой структуры, дающей возможность реализовать все виды тормозных режимов: противовключение,динамическое и рекуперативное торможение.
Таким образом, в процессе торможения на интервале коммутации преобразователя более интенсивный вид торможения в импульсе сменяется менее интенсивным в паузе интервала коммутации, что позволяет регулировать тормозной момент в процессе торможения. Состояние структуры силовой части, а следовательно, и вид регулируемого тормозного режима определяются вспомогательным щ обратным тиристорами 9 и 10. Если они находятся в проводящем состоянии, то в системе электропривода реализуется управляемый тормозной режим, представляющий собой сочетание на интервале- коммутации режимов торможения протавовключением и динамического торможения. При этом ток якорной цепи электродвигателя в импульсе интервала коммутации, т.е. когда транзисторный ключ 3 открыт, замыкается по цепи положительный
вывод источника 4 питания - реверсор 2 - электродвигатель 1 - вспомогательный тиристор 9 - отрицательный вывод источника 4 питания. В паузе интервала коммутации преобразователя, когда транзисторный
ключ 3 закрыт, ток якорной цепи замыкается через обратный тиристор 10. Если с тиристоров 9 и 10 сигнал управления снят, то в импульсе интервала коммутации ток якоря электродвигателя 1 замыкается через открытый транзисторный ключ, тири- сторный реверсор 2 и шунтирующий диод 8. а в паузе, когда транзисторный ключ 3 закрыт, ток якорной цепи замыкается через рекуперирующее устройство, состоящее из
обмотки 12 трансформатора и тиристорного моста 11.
Таким образом, при выключенных тиристорах 9 и 10 реализуется управляемый
тормозной режим, представляющий собой сочетание на интервале коммутации режимов динамического и рекуперативного торможений. В системе электропривода, построенной на базе изменяемой структуры, необходимо прежде всего выявить наличие собственно тормозного режима в электроприводе, что достигается сравнением знаков сигналов ошибки и обратной связи. Наличие тормозного режима в приводе
определяется элементами 14-20. В двигательном режиме работы I и3ад I I Uoc I, т.е. знак сигнала ошибки Ј совпадает со знаком сигнала задания (е 1)3ад - Uoc), При уменьшении сигнала задания до уровня
I Узад I Uoc сигнал ошибки изменяет знак и система электропривода переходит в тормозной режим. Таким образом, электропривод работает в двигательном режиме, когда sign е & sign Uoc , а при условии
Ј sign sign U0c система электропривода , реализует один из тормозных режимов. При работе привода в двигательном режиме, соответствующем соотношению входных сигналов (+изад) и (-Uoc), на выходе элемента
20 будет сигнал логической 1, а на выходе элемента 16 - сигнал логического О. При переходе в тормозной режим изменится знак сигнала ошибки е и соответственно на выходе элемента 16 появится сигнал логической 1, а на выходе элемента 20 логическая 1 останется. При работе привода в двигательном режиме, соответствующем соотношению входных сигналов (-и3ад) и (+Uoc), на выходе элемента 20 будет сигнал
логического О, а на выходе элемента 16 - сигнал логической 1. При переходе в тормозной режим изменится знак и соответственно на выходе элемента 16 сохранится сигнал логической 1, а на выходе элемента 20 также появится сигнал логической 1.
Таким образом, в двигательном режиме работы на одном из входов элемента И-НЕ 17 всегда присутствует сигнал логического О, что обуславливает на его выходе сигнал логической 1, который разрешает подачу сигнала управления на тиристоры 9 и 10. Проводящее состояние тиристоров 9 и 10 при соответствующем состоянии тиристор- ного реверсора 2 обеспечивает двигательный режим работы электропривода.
Тормозному режиму работы электропривода соответствует состояние, когда на выходах элементов 20 и 16 присутствуют сигналы логических 1, т.е. вид информации на выходе элемента 13, определяющий состояние тиристоров 9 и 10, а следовательно, и вид торможения определяются информацией на выходе элемента 24. Если в процессе торможения величина ошибки Ј лежит в пределах заданной динамической точности системы, т о на выходе компаратора 23 будет сигнал логического О, а на выходе элемента 24 - сигнал логической 1. В этом случае с выхода элемента 13 запрет в виде логического О поступает на формирователь 25 сигналов управления и снимает сигналы управления с тиристоров 9 и 10, что при соответствующем состоянии тири- сторного реверсора 2 определяет сочетание динамического и рекуперативного торможения. Если же в процессе торможения величина ошибки Ј превысит заданную динамическую точность системы, то на выходе коммутатора 23 появится сигнал логической 1,а на выходе элемента 24-сигнал логического О. В этом случае сигнал логической 1 с выхода элемента 13 разрешает, подачу сигнала управления на тиристоры 9 и 10, что при соответствующем состоянии тиристорного реверсора 2 обуславливает в приводе регулируемый тормозной режим в виде сочетания торможения противовклю- чением и динамического торможения.
Уровень динамической точности, определяемый требованиями к конкретной системе автоматизированного электропривода, устанавливается изменением коэффициента усиления усилителя 21 сигнала ошибки и порога срабатывания компаратора 23.
В зависимости от-вида системы электропривода (следящий электропривод, регулируемый или моментный) в качестве
сигнала Uoc могут быть использованы сигналы скорости или тока.
Электропривод допускает использование двигателей постоянного тока любого
5 способа возбуждения. В случае применения двигателей последовательного или смешанного возбуждения обмотка последовательного возбуждения включается вместо дросселя 7.
0 Управляемый тормозной режим, представляющий собой сочетание динамического и рекуперативного торможений, имеет лучшие энергетические показатели по сравнению с режимом торможения в виде
5 сочетания противовключения с динамическим торможением, в то время как по динамическим показателям имеет место обратное соотношение. Это указывает на целесообразность изменения энергетиче0 ского состояния электропривода в тормозном режиме при изменении величины динамической ошибки.
Таким образом, электропривод постоянного тока осуществляет выбор и
5 автоматическое переключение в процессе торможения регулируемых тормозных режимов, т.е. изменение энергетического состояния для улучшения энергетических характеристик при требуемой динамиче0 ской точности.
Формула изобретения Электропривод постоянного тока, содержащий электродвигатель, якорная
5 обмотка которого включена в диагональ тиристорного реверсора, первый вывод другой диагонали которого соединен через транзисторный ключ с положительным выводом источника постоянного тока, выпол0 ненного в виде трехфазного выпрямителя, подключенного к вторичной обмотке трехфазного трансформатора, второй вывод другой диагонали тиристорного реверсора через сглаживающий дроссель подключен к
5 анодам диода, вспомогательного и обратного тиристоров, катод диода соединен с положительным выводом источника постоянного тока, катод обратного тиристора подключен к первому выводу другой диаго0 нали тиристооного реверсора, катод вспомогательного тиристора соединен с отрицательным выводом источника постоянного тока, однофазный тиристорный мост, общий анод которого подключен к аноду
5 обратного тиристора, а общий катод - к катоду обратного тиристора, в диагональ переменного тока однофазного тиристорного моста включена дополнительная вторичная обмотка трансформатора, выполненная по схеме разомкнутого треугольника, причем
одна из фазных обмоток включена встречно относительно двух других, отличающийся тем, что, с целью улучшения энергетических характеристик электропривода путем изменения его энергетического состояния в тормозных режимах при требуемой динамической точности, в него введены узел сравнения сигналов задания и обратной связи, усилитель, выпрямитель, три компаратора, три инвертора, два элемента И-НЕ, один трехвходовый элемент И- НЕ и формирователь сигнала управления тиристорами, причем к первому входу трех- входового элемента И-НЕ подключены последовательно соединенные первы й компаратор, первый инвертор и первый элемент И-НЕ, к второму входу трехвходового элемента И-НЕ подключены последовательно соединенные узел сравнения сигналов
задания и обратной связи, второй компара тор, второй инвертор и второй элемент И- НЕ, к третьему входу трехвходового элемента И-НЕ подключены последовательно соединенные усилитель, выпрямитель, третий компаратор и третий инвертор, вто,- рой вход узла сравнения сигналов задания и обратной связи соединен с входом первого компаратора, вход второго компаратора
соединен с входом усилителя, второй вход первого элемента И-НЕ подключен к выходу второго компаратора, выход первого компаратора соединен с вторым входом второго элемента И-НЕ, выход трехвходового элемента И-НЕ подключен к входу формирователя сигнала управления тиристорами, выходы которого соединены с управляющими электродами вспомогательного и обратного тиристоров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1988 |
|
SU1577049A1 |
| Реверсивный электропривод | 1983 |
|
SU1116514A1 |
| Электропривод постоянного тока | 1986 |
|
SU1332502A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2000 |
|
RU2168259C1 |
| Электропривод постоянного тока | 1985 |
|
SU1288878A1 |
| Электропривод постоянного тока | 1977 |
|
SU700907A1 |
| Устройство для торможения трехфазного асинхронного электродвигателя | 1981 |
|
SU974531A1 |
| Устройство для управления транспортным средством | 1986 |
|
SU1402452A1 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| Электропривод постоянного тока | 1984 |
|
SU1239820A1 |
Изобретение относится к электротехнике, в частности к автоматизированным электроприводам постоянного тока, и может быть использовано в приводах многокоординатных механизмов. Целью изобретения является улучшение энергетических характеристик электропривода за счет изменения его энергетического состояния в тормозных режимах при требуемой динамической точности. Автоматическая подстройка энергетического состояния электропривода при требуемой динамической точности осуществляется за счет выбора и автоматического переключения регулируемых тормозных режимов в процессе торможения электропривода в функции допустимой динамической ошибки. Силовая часть электропривода представляет собой импульсный преобразователь, построенный на базе изменяемой структуры, дающей возможность реализовать все виды тормозных режимов: противовключение, динамическое и рекуперативное торможение. 1 ил.
-
| Электропривод постоянного тока | 1980 |
|
SU902185A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод постоянного тока | 1985 |
|
SU1288878A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
