Изобретение относится к автоматическому управлению различными механическими системами и может быть применено в протезах нижних конечностей с внешним источником энергии, в системах про- граммного управления перемещением элементов различных механизмов и машин - металлорежущих станков, промышленных роботов, антропоморфных шагающих роботов.
Цель изобретения - снижение энерготрат инвалида при ходьбе путем обеспечения перемещения связанных с демпфером звеньев протеза по любым индивидуально заданным антропоморфным траекториям в пространстве.
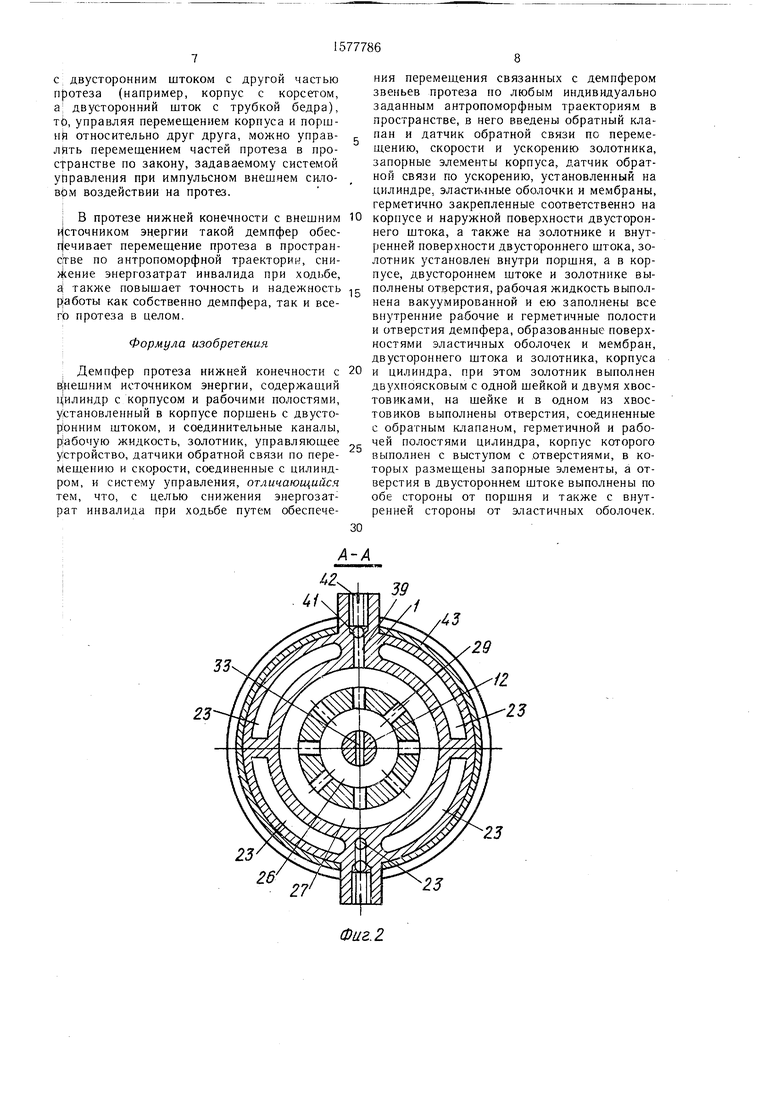
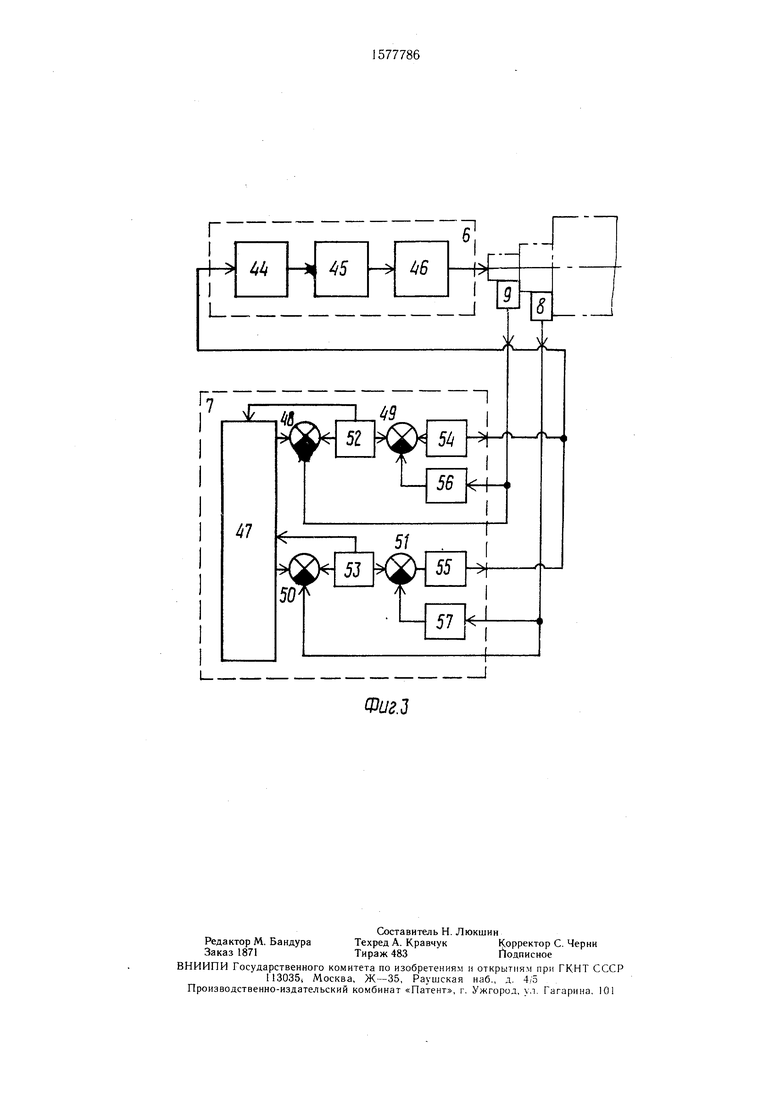
На фиг 1 изображен демпфер в осевом сечении; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - показана структурная схема управляющего устройства и системы управления.
Демпфер содержит цилиндр 1 с корпусом 2, установленным в нем поршнем 3 с двусторонним штоком 4, золотник 5, размещенный внутри поршня 3 и двустороннего штока 4, управляющее устройство б, систему 7 управления, датчики 8, 9 обратной связи по перемещению, скорости и ускоре- нию.
Выход управляющего устройства б подключен к выходу системы 7 управления, выход управляющего устройства 6 - к входу золотника 5, входы датчиков 8 и 9 обратной связи подключены к цилиндру 1 и золотнику 5 соответственно, а выходы датчиков 8, 9 обратной связи - к входам системы 7 управления. Золотник 5 выполнен с двумя поясками 10, 11, шейкой 12, хвостовиками 13, 14. Внутри золотника 5 (а именно, пояска 11) размещен обратный клапан 15. На концах хвостовиков 13, 14 герметично закреплены центральные части эластичных мембран 16, 17, периферийные части которых герметично закреплены на двустороннем штоке 4.
Эластичная мембрана 16, торцовая поверхность пояска 10 золотника 5, внутренняя поверхность двустороннего штока 4, поверхность хростовика 13 образуют кольцевую полость 18. Эластичная мембрана 17, тор- цовая поверхность пояска 11 золотника 5, внутренняя поверхность двустороннего штока 4, поверхность хвостовика 14 образуют кольцевую полость 19. Корпус 2 герметично охвачен эластичной оболочкой 20, которая может быть выполнена в виде гоф- рированной цилиндрической мембраны. Эластичная оболочка 20, наружные поверхности корпуса 2 и двустороннего штока 4 образуют две кольцевые полости (низкого давления) 21 и 22, соединенные между собой каналами 23, выполненными в корпу- се 2. Каналов 23 может быть, например, четыре - овалообразной формы и один канал - цилиндрический.
Кольцевая полость 18 соединена с кольцевой полостью 21 каналами 24. Кольцевая полость 19 соединена с кольцевой полостью 22 каналами 25., Шейка 12 золотника 5 образует с внутренней поверхностью поршня 3 и двустороннего штока 4 кольцевую полость 26. Наружная поверхность двустороннего штока 4 образует с внутренней поверхностью корпуса 2 две кольцевые рабочие полости 27 и 28, разделенные между собой поршнем 3.
Кольцевая полость 26 соединена с кольцевой полостью 27 каналами 29, с кольцевой полостью 28 - каналами 30, с обратным клапаном 15 - каналами 31 и 32. Каналов 24, 25, 29 и 30 может быть, например, 8. Обратный клапан 15 соединен с кольцевой полостью 19 каналами 33 и 34. Обратный клапан 15 состоит из шарика 35 и пружины 36. Величина хода золотника 5 определяется положением упорной шайбы 37. Обратное перемещение золотника 5 обеспечивается пружиной 38.
Демпфер заполняется вакуумированной рабочей жидкостью через отверстия 39, 40. Для их герметизации применяются запорные элементы в виде шариков 41 и винтов 42. Для герметичного закрепления эластичной оболочки 20 используются хомуты 43.
Управляющее устройство 6 состоит из последовательно соединенных электродвигателя 44 с редуктором 45 и преобразователем 46 - кинематической пары «винт- гайка, причем выходное звено преобразователя 46 (гайка) жестко связано с хвостовиком 13 золотника 5. Система 7 управления состоит из блока 47 задания программ, элементов 48-51 сравнения, преобразующих устройств 52, 53, последовательно соединенных корректирующих устройств 54 и 55, параллельно включенных корректирующих устройств 56 и 57, а также датчиков 8 обратной связи по положению, скорости и ускорению двустороннего штока 4 относительно корпуса 2 и датчиков 9 обратной связи по положению, скорости и ускорению золотника 5 относительно двустороннего штока 4. Внутренние связи системы 7 управления изображены стрелками на фиг. 3.
Демпфер работает следующим образом.
Гидравлическая система демпфера, в том числе и кольцевые полости 21, 22 заполнены вакуумированной рабочей жидкостью (маслом).
Заполнение демпфера происходит следующим образом.
Сняты винты 42 и шарики 41. Рабочая жидкость, предварительно вакуумированная, заливается под давлением через отверстие 40 в цилиндрический канал 23, а из него в кольцевые полости 21 и 22. Из кольцевой полости 21 рабочая жидкость поступает через каналы 24 в кольцевую полость 18. Из кольцевой полости 22 рабочая жидкость поступает через каналы 25 в кольце вую полость 19. При возрастании давления в кольцевой полости 19 выше давления настройки пружины 36 обратного клапана 15 шарик 35 обратного клапана 15 смещается влево, пропуская рабочую жидкость по каналам 31 и 33 в кольцевую полость 26. Через каналы 29, 30 происходит заполнение кольцевых полостей 27 и 28. После полного заполнения демпфера рабочей жидкостью герметизуются с помощью шариков 41 и винтов 42 отверстия 39, 40. Обратный клапан 15 находится в закрытом состоянии. Демпфер готов к работе. При включении демпфера включается его электрическая система.
На двусторонний шток 4 с поршнем 3 цилиндра 1 действует активная внешняя сила (импульсное воздействие), сила инерции подвижных частей поршня 3, двустороннего штока 4 и внешней механической системы. Необходимо обеспечить перемещение двустороннего штока 4 и поршня 3 относительно корпуса 2 цилиндра 1 по определенному требуемому закону. Корпус 2 зафиксирован.
Управляющий сигнал от системы 7 управления подается на управляющее устройство 6, где преобразуется в продольное перемещение выходного звена, а затем - на золотник 5. При этом последний перемещается с учетом жесткости пружины 38, открывая или закрывая каналы 30, что определяет скорость перемещения поршня 3 и двустороннего штока 4 относительно корпуса 2 цилиндра 1. Датчики 8, 9 обратной связи фиксируют действительное положение, скорость и ускорение двустороннего штока 4 относительно корпуса 2 цилиндра 1 и золотника 5 относительно двустороннего штока 4 и передают сигналы в систему 7 управления, где до сигналам датчиков 8. 9 обратной связи происходит корректировка управляющего сигнала, поступающего на управляющее устройство 6.
Пусть поршень 3 с двусторонним штоком 4 находится в крайнем левом положении (кольцевые полости имеют минимальные объемы). В этом положении на поршень 3 с двусторонним штоком 4 действует активная сила (импульсное воздействие), направленная вправо (на фиг. 1 обозначена- -). Под действием внешней активной силы поршень 3 и двусторонний шток 4 начинают перемещаться внраво. Объем кольцевой полости 22 увеличивается, а кольцевой полости 21 - уменьшается. При этом жидкость из кольцевой полости 21 через каналы 23 вытесняется в кольцевую полость 22. Жидкость из кольцевой полости 28 вытесняется через каналы 30 в кольцевую полость 26, а из нее - через отверстие 29 в кольцевую полость 27.
Скорость перемещения поршня 3 и двустороннего штока 4 зависит от величины
0
перекрытия золотником 5 (пояском 1) проходных сечений каналов 30. Закон перекрытия золотником 5 проходного сечения каналов 30 задается системой 7 управления в виде управляющего сигнала, подаваемого на управляющее устройство 6, который корректируется с помощью сигналов от датчиков 8, 9 связи, несущих информацию о положении, скорости и ускорении поршня 3 с двусторонним штоком 4 и золотника 5. При движении золотника 5 из левого крайнего положения вправо объем кольцевой полости 18 увеличивается, давление в ней снижается, и рабочая жидкость может поступать в кольцевую полость 18 через
5 каналы 24 из полости 21. Объем кольцевой полости 19 уменьшается, давление в ней повышается и рабочая жидкость через каналы 25 вытекает в полость 22. При движении золотника 5 из крайнего правого положения влево происходит обратный процесс.
Пусть поршень 3 с двусторонним штоком 4 находится в крайнем правом положении. В этом положении на поршень 3 с двусторонним штоком 4 действует внеш5 няя активная сила (постоянное воздействие), направленная влево (на фиг. 1 обозначено ч-). Под действием внешней активной силы поршень 3 с двусторонним штоком 4 начинает перемещаться влево. Объем кольцевой полости 21 увеличивается,
0 кольцевой полости 22 - уменьшается. При этом жидкость из кольцевой полости 22 через каналы 23 вытесняется в кольцевую полость 21, жидкость из кольцевой полости 27 через каналы 29 вытесняется в кольцевую полость 26, из нее через каналы 30 -
5 в кольцевую полость 28.
Пусть на поршень 3 с двусторонним штоком 4 действует активная сила по величине большая, чем допустимая. При этом поршень 3 с двусторонним штоком 4 на0 чинает быстро перемещаться (быстрее, чем допустимо). Это перемещение регистрируется в первую очередь датчиком 8 обратной связи по ускорению двустороннего штока 4. Сигнал от датчика 8 обратной связи поступает в систему 7 управления, которая
5 передает управляющий сигнал на приведение золотника 5 в положение, при котором золотник 5 полностью перекрывает каналы 30 При этом переток рабочей жидкости из кольцевой полости 27 в кольцевую полость 28 отсутствует, т. е. реализуется режим
0 экстренного торможения поршня 3 относительно корпуса 2.
Описанный демпфер протеза нижней конечности с внешним источником энергии 5 обеспечивает возможность перемещения поршня со штоком относительно корпуса (или наоборот) по любому требуемому закону. Так как корпус демпфера шарннрно связан с одной частью протеза, а поршень
с двусторонним штоком с другой частью протеза (например, корпус с корсетом, а двусторонний шток с трубкой бедра), то, управляя перемещением корпуса и поршня относительно друг друга, можно управлять перемещением частей протеза в пространстве по закону, задаваемому системой управления при импульсном внешнем силовом воздействии на протез.
ния перемещения связанных с демпфером звеньев протеза по любым индивидуально заданным антропоморфным траекториям в пространстве, в него введены обратный клапан и датчик обратной связи по перемещению, скорости и ускорению золотника, запорные элементы корпуса, датчик обратной связи по ускорению, установленный на цилиндре, эластичные оболочки и мембраны, герметично закрепленные соответственно на В протезе нижней конечности с внешним 10 корпусе и наружной поверхности двусторон- источником энергии такой демпфер обес- него штока, а также на золотнике и внут- печивает перемещение протеза в простран- ренней поверхности двустороннего штока, зо- стве по антропоморфной траектории, сни- лотник установлен внутри поршня, а в кор- жение энергозатрат инвалида при ходьбе, пусе, двустороннем штоке и золотнике вы- а также повышает точность и надежность полнены отверстия, рабочая жидкость выпол- работы как собственно демпфера, так и все- нена вакуумированной и ею заполнены все го протеза в целом.внутренние рабочие и герметичные полости
и отверстия демпфера, образованные поверхФормула изобретенияностями эластичных оболочек и мембран,
двустороннего штока и золотника, корпуса
Демпфер протеза нижней конечности с 20 и цилиндра, при этом золотник выполнен внешним источником энергии, содержащий двухпоясковым с одной шейкой и двумя хвое - цилиндр с корпусом и рабочими полостями, товиками, на шейке и в одном из хвос- установленный в корпусе поршень с двусто- товиков выполнены отверстия, соединенные ронним штоком, и соединительные каналы, с обратным клапаним, герметичной и рабо- рабочую жидкость, золотник, управляющее чей полостями цилиндра, корпус которого
устройство, датчики обратной связи по перемещению и скорости, соединенные с цилиндром, и систему управления, отличающийся тем, что, с целью снижения энергозатрат инвалида при ходьбе путем обеспечевыполнен с выступом с отверстиями, в которых размещены запорные элементы, а отверстия в двустороннем штоке выполнены по обе стороны от поршня и также с внутренней стороны от эластичных оболочек.
выполнен с выступом с отверстиями, в которых размещены запорные элементы, а отверстия в двустороннем штоке выполнены по обе стороны от поршня и также с внутренней стороны от эластичных оболочек.
| название | год | авторы | номер документа |
|---|---|---|---|
| Протез нижней конечности с внешним источником энергии | 1988 |
|
SU1577785A1 |
| ПРОТЕЗ ГОЛЕНОСТОПНОЙ ЧАСТИ НОГИ | 1999 |
|
RU2153308C1 |
| Ортопедический аппарат | 1979 |
|
SU797682A1 |
| ГОЛЕНОСТОПНЫЙ УЗЕЛ ПРОТЕЗА | 1998 |
|
RU2132665C1 |
| ТАЗОБЕДРЕННЫЙ УЗЕЛ | 2006 |
|
RU2325877C2 |
| ГОЛЕНОСТОПНЫЙ УЗЕЛ ПРОТЕЗА | 2001 |
|
RU2219877C2 |
| СПОСОБ УПРАВЛЕНИЯ КОЛЕННЫМ СОЧЛЕНЕНИЕМ ПРОТЕЗА НОГИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2089138C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОТЕЗОМ НИЖНЕЙ КОНЕЧНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2032434C1 |
| Протез бедра | 1985 |
|
SU1292763A1 |
Изобретение относится к протезостроению и может быть использовано в различных системах автоматического управления, в том числе и в системах управления промышленными роботами и антропоморфными шагающими роботами. Цель изобретения - снижение энергозатрат инвалида при ходьбе путем обеспечения перемещения связанных с демпфером звеньев протеза по любым индивидуально заданным антропоморфным траекториям в пространстве. Демпфер состоит из цилиндра 1 с корпусом 2, установленного в нем поршня 3 с двусторонним штоком 4, золотника 5, размещенного внутри поршня 3 и двустороннего штока 4, управляющего устройства 6, системы управления 7 и датчиков обратной связи 8 и 9. Внутренние полости демпфера герметизированы с помощью эластичных мембран 16 и 17 и эластичной оболочки 20. Описанная конструкция демпфера протеза нижней конечности с внешним источником энергии позволяет снизить энергозатраты инвалида при ходьбе и повысить точность работы протеза. 3 ил.
23
Фиг. 2
43
29
23
23
Г
Фиг.З
| Протез бедра с гидравлической системой | 1961 |
|
SU148484A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
