Изобретение относится к медицинской технике, а точнее к протезостроению, и может быть применено в протезах нижних конечностей с внешним источником энергии и также в системах программного управления перемещением элементов различных механизмов и машин - промышленных роботов, антропоморфных шагающих роботов.
Целью изобретения является снижение энергозатрат инвалида при ходьбе путем снижения подвижных частей протеза и обеспечения его надежной подкосоустойчивости.
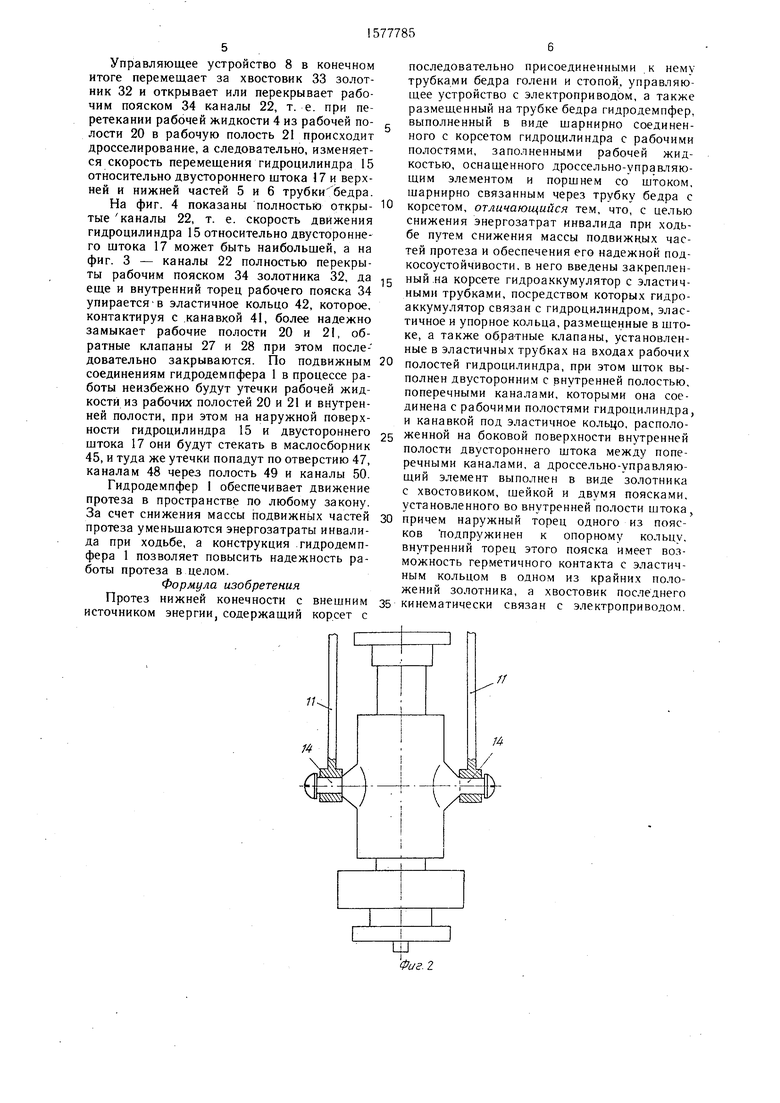
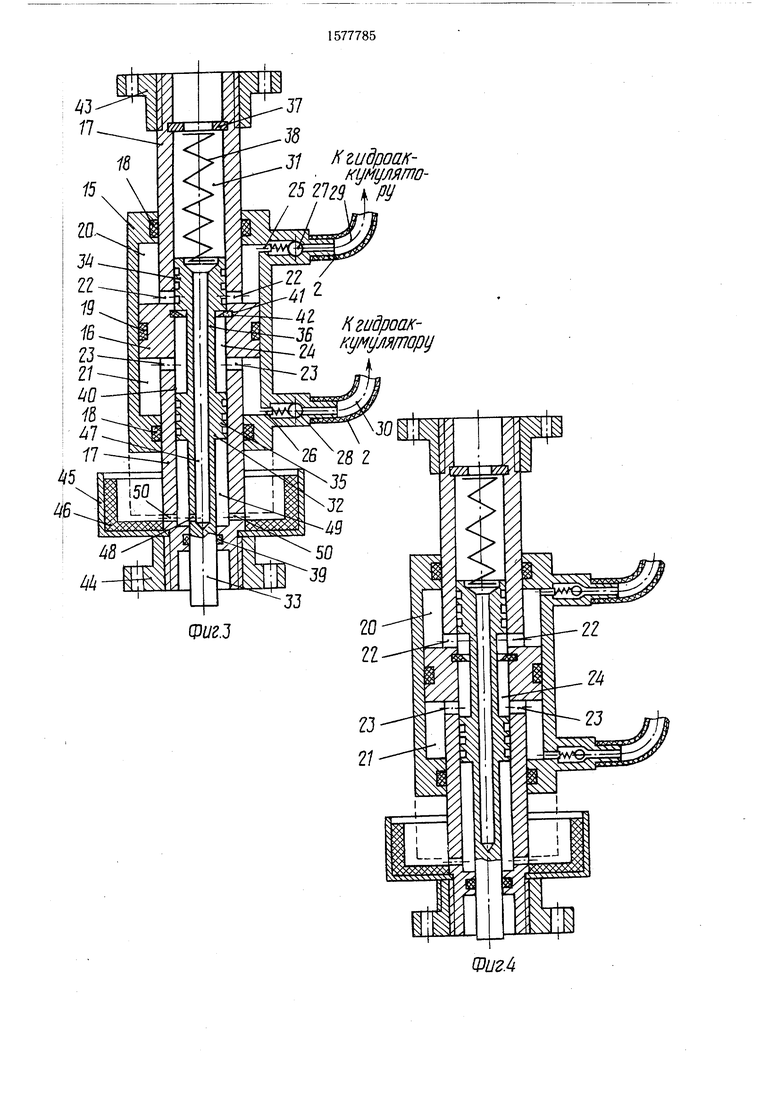
На фиг. 1 изображен протез нижней конечности с гидродемпфером и внешним источником энергии, общий вид; на фиг. 2 - крепление гидродемпфера на трубке бедра; на фиг. 3 - осевой разрез через гидродемпфер; на фиг. 4 - то же, при ином расположении золотника; на фиг. 5 - конструкция управляющего устройства.
Протез нижней конечности содержит гидродемпфер 1, связанный эластичными трубками 2 с гидроаккумулятором 3, имеющим запас рабочей жидкости 4. Гидродемпфер 1 установлен между верхней частью 5 трубки бедра и нижней частью 6 трубки бедра, а гидроаккумулятор 3 закреплен на корсете 7 протеза. Между гидродемпфером 1 и нижней частью б трубки бедра установлено управляющее устройство 8. На корсете 7 протеза, в его нижней части, расположены цилиндрические шарниры 9 и 10, один из которых (цилиндрический шарнир 9) через рычаги 11 (фиг. 2) связан с гидродемпфером 1, а второй цилиндрический шарнир 10 связан с верхней частью 5 трубки бедра. Нижняя часть 6 трубки бедра шар- нирно связана с трубкой 12 голени, на дис- тальной оконечности которой выполнена стопа 13. Гидродемпфер 1 шарнирно связан с рычагами 11 посредством цапф 14. Гидродемпфер 1 состоит из гидроцилиндра 15, внутри которого расположен поршень 16 с двусторонним штоком 17, в гидроцилиндре 15 и поршне 16 установлены уплотнения 18 и 19. Поршень 16 и двусторонний шток 17 разделяют внутреннюю часть гидроцилиндра 15 на рабочие полости 20 и 21, которые каналами 22 и 23 связаны с внутренней полостью 24, а каналами 25 и 26 через обратные клапаны 27 и 28 - с внутренними каналами 29 и 30 эластичных трубок 2. По оси двустороннего штока 17 выполнено отверстие 31, в котором расположен дроссельно-управляющий элемент в виде золотника 32 с хвостовиком 33, поясками 34 и 35 и шейкой 36, упорное кольцо 37 и пружина 38. Между двусторонним штоком 17 и хвостовиком 33 установлено уплотнение 39. На внутренней поверхности 40 двустороннего штока 17 выполнена канавка 41, в которой установлено эластичное кольцо 42. На обоих концах двустороннего штока 17 на резьбе установлены фланцы 43 и 44. Нижний фланец 44 фиксирует от5
носительно двустороннего штока 17 маслосборник 45 с впитывающим кольцом 46.
Внутри золотника 32 выполнено отверстие 47, которое через канал 48 в хвос- товике 33, полость 48, каналы 50 в двустороннем штоке 17 связано с маслосборником 45. Управляющее устройство 8 выполнено в виде последовательно соединенных (фиг. 5) электродвигателя 51 с редукто- 0 ром 52 и преобразователем 53 - кинематической пары «винт-гайка, выходное звено преобразователя 53 - гайка 54 жестко связано с хвостовиком 33 золотника 32, а корпус электродвигателя 51 неподвижно за- - креплен относительно нижней части 6 трубки бедра.
На вход электродвигателя 51 подается сигнал от системы управления протезом (не показана).
В качестве управляющего устройства мо- 0 жет быть использован серийно выпускаемый электродвигатель постоянного тока ДПР-1, подключенный к внешнему источнику энергии - блоку питания (не показан) .
Протез нижней конечности с внешним источником энергии работает следующим образом.
В исходном положении гидродемпфер 1, его рабочие полости 20 и 21, внутренняя полость 24, каналы 22 и 23, а также каналы Q 25 и 26, обратные клапаны 27 и 28, каналы 29 и 30 и гидроаккумулятор 3 заполнены рабочей жидкостью 4.
При ходьбе инвалида верхняя часть 5 трубки бедра, жестко соединенная с фланцем 43 и через двусторонний шток 17 - 5 с фланцем 44, перемещается относительно корсета 7 и цилиндрических шарниров 9 и 10, совершая маятниковые колебательные движения вокруг оси цилиндрического шарнира 10. При этом за счет кинематической шарнирной связи - рычага 11 с гидроцилинд- 0 ром 15 и с цилиндрическим шарниром 9, гидроцилиндр 15 имеет поступательное перемещение относительно поршня 16 и двустороннего штока 17, вытесняя рабочую жидкость 4 из одной рабочей .полости в другую. 5 Причем рабочая жидкость 4 (фиг. 4) проходит, например, из полости 21 через каналы 23, внутреннюю полость 24 в каналы 22 и затем в рабочую полость 20. Так как эффективная площадь поршня 16 одинакова с одной и другой сторон порш- 0 ня 16, то объем вытесненной жидкости из полости 21 равен объему жидкости, который попадает в полость 20.
Система управления протезом подает сигнал на управляющее устройство 8, при 5 этом ротор электродвигателя 51 начинает вращаться и через редуктор 52 и преобразователь 53 передает на хвостовик 33 поступатьельное движение.
Управляющее устройство 8 в конечном итоге перемещает за хвостовик 33 золотник 32 и открывает или перекрывает рабочим пояском 34 каналы 22, т. е. при перетекании рабочей жидкости 4 из рабочей по- 5 лости 20 в рабочую полость 21 происходит дросселирование, а следовательно, изменяется скорость перемещения гидроцилиндра 15 относительно двустороннего штока 17 и верхней и нижней частей 5 и б трубки бедра.
На фиг. 4 показаны полностью открытые каналы 22, т. е. скорость движения гидроцилиндра 15 относительно двустороннего штока 17 может быть наибольшей, а на фиг. 3 - каналы 22 полностью перекрыты рабочим пояском 34 золотника 32, да 15 еще и внутренний торец рабочего пояска 34 упирается в эластичное кольцо 42, которое, контактируя с канавкой 41, более надежно замыкает рабочие полости 20 и 21, обратные клапаны 27 и 28 при этом после10
последовательно присоединенными к нему трубками бедра голени и стопой, управляющее устройство с электроприводом, а также размещенный на трубке бедра гидродемпфер, выполненный в виде шарнирно соединенного с корсетом гидроцилиндра с рабочими полостями, заполненными рабочей жидкостью, оснащенного дроссельно-управляю- щим элементом и поршнем со штоком, шарнирно связанным через трубку бедра с корсетом, отличающийся тем, что, с целью снижения энергозатрат инвалида при ходьбе путем снижения массы подвижных частей протеза и обеспечения его надежной под- косоустойчивости, в него введены закрепленный на корсете гидроаккумулятор с эластичными трубками, посредством которых гидроаккумулятор связан с гидроцилиндром,эластичное и упорное кольца, размещенные в штоке, а также обратные клапаны, установленные в эластичных трубках на входах рабочих
довательно закрываются. По подвижным 20 полостей гидроцилиндра, при этом шток вы- соединениям гидродемпфера 1 в процессе ра- полней двусторонним с внутренней полостью, боты неизбежно будут утечки рабочей жид- поперечными каналами, которыми она сое- кости из рабочих полостей 20 и 21 и внутрен- динена с рабочими полостями гидроцилиндра, ней полости, при этом на наружной поверх- и канавкой под эластичное кольцо, располо- ности гидроцилиндра 15 и двустороннего 25 женной на боковой поверхности внутренней штока 17 они будут стекать в маслосборник 45, и туда же утечки попадут по отверстию 47, каналам 48 через полость 49 и каналы 50.
Гидродемпфер 1 обеспечивает движение протеза в пространстве по любому закону. За счет снижения массы подвижных частей протеза уменьшаются энергозатраты инвалида при ходьбе, а конструкция гидродемпфера 1 позволяет повысить надежность работы протеза в целом.
Формула изобретения
Протез нижней конечности с внешним источником энергии, содержащий корсет с
30
полости двустороннего штока между поперечными каналами, а дроссельно-управляю- щий элемент выполнен в виде золотника с хвостовиком, шейкой и двумя поясками, установленного во внутренней полости штока, причем наружный торец одного из поясков подпружинен к опорному кольцу, внутренний торец этого пояска имеет возможность герметичного контакта с эластичным кольцом в одном из крайних положений золотника, а хвостовик последнего 35 кинематически связан с электроприводом.
последовательно присоединенными к нему трубками бедра голени и стопой, управляющее устройство с электроприводом, а также размещенный на трубке бедра гидродемпфер, выполненный в виде шарнирно соединенного с корсетом гидроцилиндра с рабочими полостями, заполненными рабочей жидкостью, оснащенного дроссельно-управляю- щим элементом и поршнем со штоком, шарнирно связанным через трубку бедра с корсетом, отличающийся тем, что, с целью снижения энергозатрат инвалида при ходьбе путем снижения массы подвижных частей протеза и обеспечения его надежной под- косоустойчивости, в него введены закрепленный на корсете гидроаккумулятор с эластичными трубками, посредством которых гидроаккумулятор связан с гидроцилиндром,эластичное и упорное кольца, размещенные в штоке, а также обратные клапаны, установленные в эластичных трубках на входах рабочих
0 полостей гидроцилиндра, при этом шток вы- полней двусторонним с внутренней полостью, поперечными каналами, которыми она сое- динена с рабочими полостями гидроцилиндра, и канавкой под эластичное кольцо, располо- 5 женной на боковой поверхности внутренней
полостей гидроцилиндра, при этом шток вы- полней двусторонним с внутренней полостью, поперечными каналами, которыми она сое- динена с рабочими полостями гидроцилиндра, и канавкой под эластичное кольцо, располо- женной на боковой поверхности внутренней
полости двустороннего штока между поперечными каналами, а дроссельно-управляю- щий элемент выполнен в виде золотника с хвостовиком, шейкой и двумя поясками, установленного во внутренней полости штока, причем наружный торец одного из поясков подпружинен к опорному кольцу, внутренний торец этого пояска имеет возможность герметичного контакта с эластичным кольцом в одном из крайних положений золотника, а хвостовик последнего кинематически связан с электроприводом.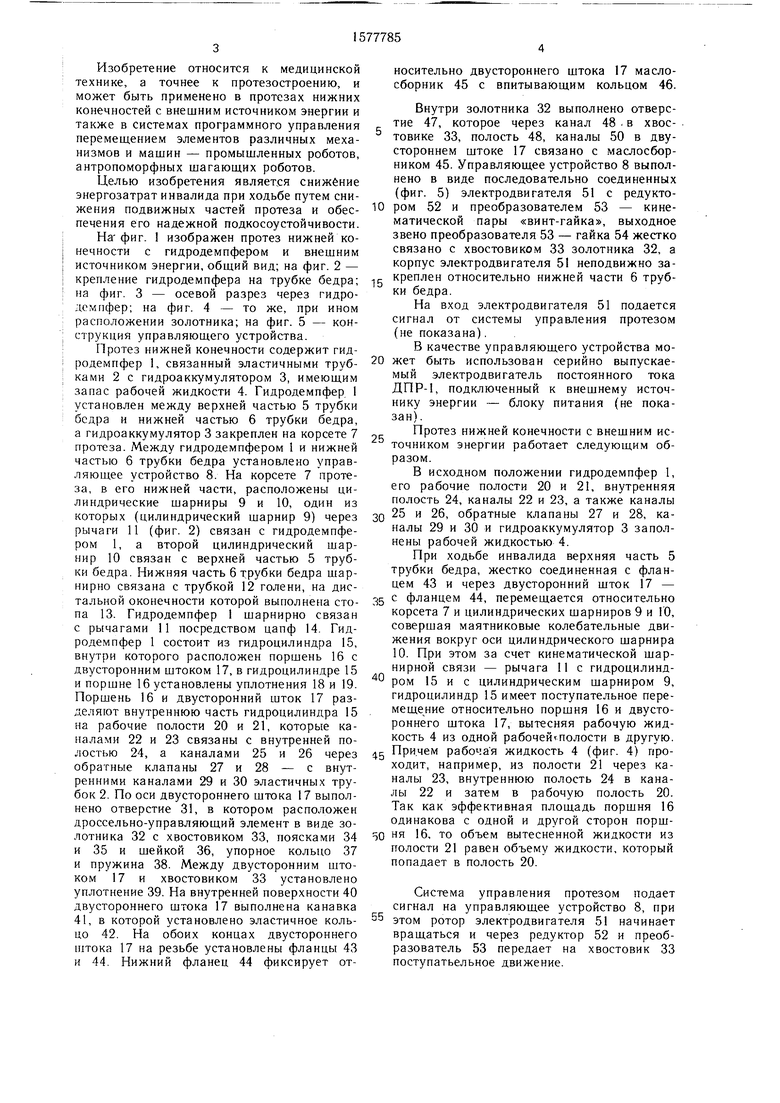
| название | год | авторы | номер документа |
|---|---|---|---|
| Демпфер протеза нижней конечности с внешним источником энергии | 1988 |
|
SU1577786A1 |
| Протез нижней конечности (его варианты) | 1983 |
|
SU1281268A1 |
| Протез бедра | 1961 |
|
SU146438A1 |
| Ортопедический аппарат | 1979 |
|
SU797682A1 |
| Коленный шарнир | 1986 |
|
SU1428371A1 |
| ПРОТЕЗ ГОЛЕНОСТОПНОЙ ЧАСТИ НОГИ | 1999 |
|
RU2153308C1 |
| Протез бедра | 1982 |
|
SU1074522A1 |
| Приемник протеза бедра и устройство для его изготовления | 1983 |
|
SU1242158A1 |
| Протез бедра с гидравлической системой | 1961 |
|
SU148484A1 |
| Протез нижней конечности | 1985 |
|
SU1292762A1 |

Изобретение относится к медицинской технике, в частности к протезостроению. Цель изобретения - снижение энергозатрат инвалида при ходьбе путем снижения массы подвижных частей протеза и обеспечение его надежной подкосоустойчивости. Протез содержит корсет 7, трубки бедра 5, 6 и голени 12, стопу 13, гидродемпфер 1, расположенный между верхней трубкой бедра 5 и нижней трубкой 6, гидроаккумулятор 3, закрепленный на корсете 7 и соединенный с гидродемпфером эластичными трубками 2. Гидродемпфер 1 представляет собой гидроцилиндр, внутри которого расположен поршень с двусторонним штоком. Внутри штока расположен золотник, который имеет возможность перекрывать своими поясками поперечные каналы, связывающие рабочие полости гидроцилиндра. Рабочая полость 4 при ходьбе инвалида на протезе вытесняется из рабочей полости в рабочую полость /или наоборот/ поршнем, протекая при этом по поперечным каналам. Перекрывая поперечный канал золотником можно тормозить движением подвижных частей протеза, а перекрыв поперечный канал полностью, надежно замкнуть протез. 5 ил.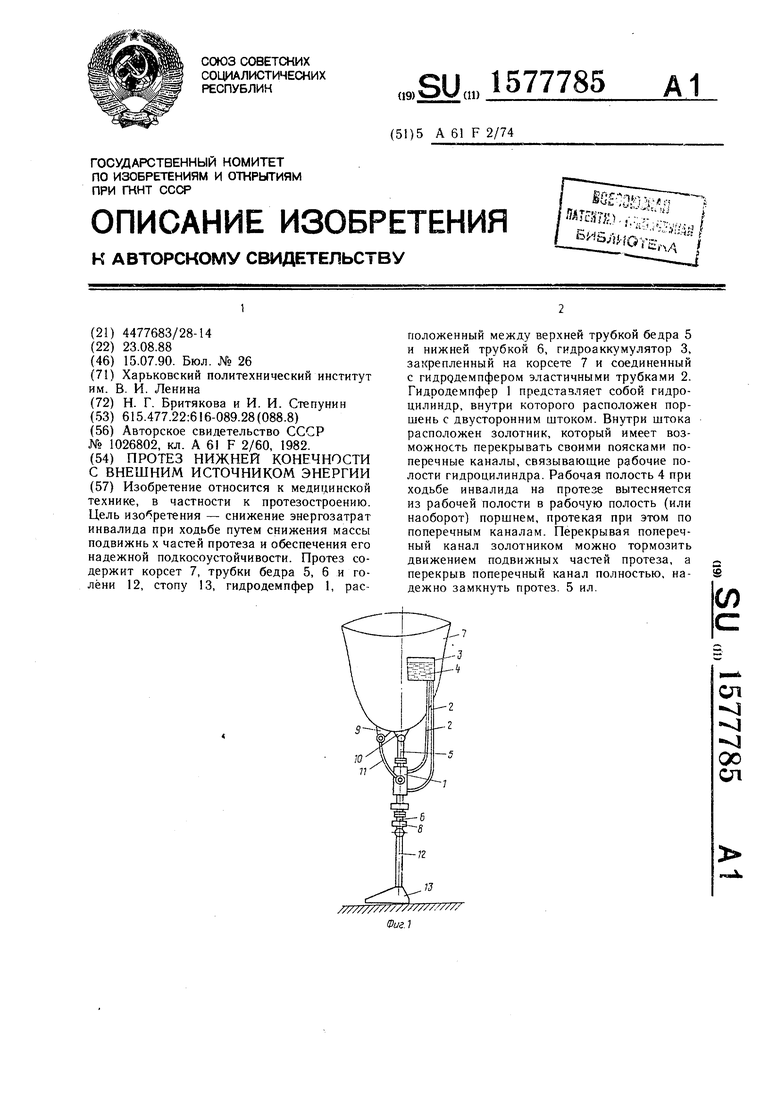
fid v 62LZ SI -ошм/шГш -шф7гу /Г
РГ
W
98ZZZ9I
Фиг. 5
| Протез нижней конечности | 1982 |
|
SU1026802A1 |
