направление, а другая часть отклоняется под прямым углом. Отклоненный вторым светоделителем 3-4 световой пучок попадает на первый светоделитель 5, в результате чего одна часть проходит сквозь него, отражается в обратном направлении искусственным горизонтом 7. снова отражаете первым светоделителем 5 и собирается в плоскости анализа фотоэлектрического дитчика 9 с помощью фокусирующего элемента 8, а другая часть - отражается первым светоделителем, попадает в световозвращатель 6. после чего также собирается в плоскости
анализа фотоэлектрического датчика 9 с помощью фокусирующего элемента 8. В плоскости анализа образуются два световых пятна, расстояния между которыми прямо пропорциональны наклону к плоскости горизонта референтного направления. Электрический сигнал с выхода фотоэлектрического датчика 9 поступает на вход блока управления 10, выход которого электрически соединен с приводом оптического компенсатора 11. Устройство обеспечивает задания горизонтального референтного направления в автоматическом режиме. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лазерный нивелир | 1989 |
|
SU1779925A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ЗВУКА | 2011 |
|
RU2476898C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ЗВУКА | 2011 |
|
RU2478220C1 |
| Устройство для задания опорной световой плоскости | 1987 |
|
SU1508094A1 |
| Устройство для измерения неплоскостности поверхностей | 1978 |
|
SU665206A1 |
| Интерферометр | 1988 |
|
SU1587327A1 |
| Эллипсометр | 2016 |
|
RU2638092C1 |
| Устройство для контроля отклонений положений объектов от прямолинейности | 1977 |
|
SU742708A1 |
| Устройство для задания опорной световой плоскости | 1987 |
|
SU1493869A1 |
| СПОСОБ ПОЛУЧЕНИЯ ОПТИЧЕСКИХ ТРЕХМЕРНЫХ И СПЕКТРАЛЬНЫХ ИЗОБРАЖЕНИЙ МИКРООБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2574791C2 |
Изобретение относится к геодезическому приборостроению, в частности к приборам для задания лазерным пучком горизонтального направления, и может быть использовано при проведении высокоточных инженерно-геодезических работ. Целью изобретения является повышение точности за счет уменьшения влияния разъюстировки. Световой пучок от лазера 1 формируется коллимирующей оптической системой 2, проходит оптический компенсатор 11 и попадает на второй светоделитель 3-4, в результате чего одна часть светового пучка проходит сквозь него, образуя референтное направление, а другая часть отклоняется под прямым углом. Отклоненный вторым светоделителем 3-4 световой пучок попадает на первый светоделитель 5, в результате чего одна часть проходит сквозь него, отражается в обратном направлении искусственным горизонтом 7, снова отражается первым светоделителем 5 и собирается в плоскости анализа фотоэлектрического датчика 9 с помощью фокусирующего элемента 8, а другая часть - отражается первым светоделителем, попадает в световозвращатель 6, после чего также собирается в плоскости анализа фотоэлектрического датчика 9 с помощью фокусирующего элемента 8. В плоскости анализа образуются два световых пятна, расстояние между которыми прямо пропорционально наклону к плоскости горизонта референтного направления. Электрический сигнал с выхода фотоэлектрического датчика 9 поступает на вход блока управления 10, выход которого электрически соединен с приводом оптического компенсатора 11. Устройство обеспечивает задания горизонтального референтного направления в автоматическом режиме. 1 ил.
Изобретение относится к геодезическому приборостроению, в частности к приборам для задания лазерным пучком горизонтального направления, и может быть использовано при проведении высокоточных инженерно-геодезических работ.
Цель изобретения - повышение точности.
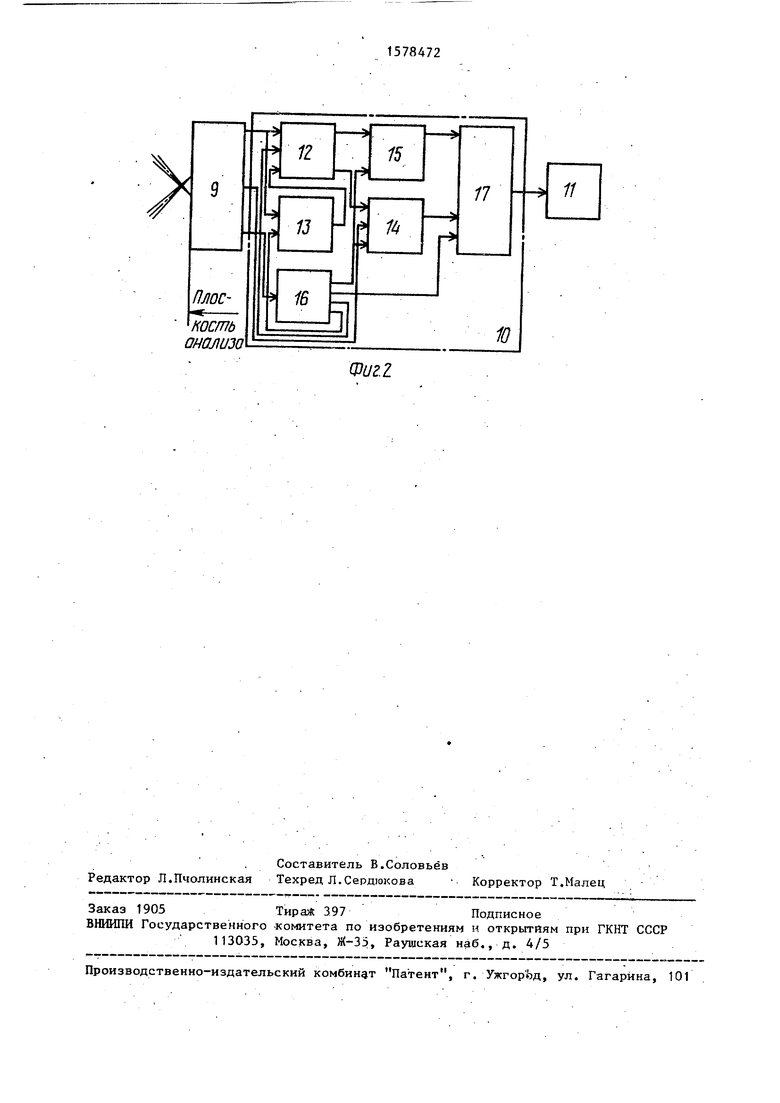
На фиг.1 представлена схема лазерного нивелира; на фиг.2 - внутренняя структура блока управления. Лазерный нивелир состоит из последовательно расположенных лазера 1 коллимирующей оптической системы 2, нерасстраиваемого ответвите- ля, выполненного, например, в виде пентапризмы 3, дополненной до плоскопараллельной пластины клином 4, светоделителя 5, выполненного, на- пример, в виде кубпризмы, нерасстраиваемого двухгранного отражателя 6, плавающего зеркала 7, фокусирующего элемента 8, позиционно-чувствитель- ного датчика 9, блока управления 10 и оптического компенсатора 11, расположенного между коллимирующей оптической системой 2 и нерасстраиваемым ответвителем 3-4,
Блок управления 10 состоит из электрически связанных между собой привода компенсатора 11, порогового устройства 12, пикового детектора 13 счетчика импульсов 14, триггера 15, схемы синхронизации 16 и схемы уп- равления 17.
5
0
5
0
5
0
5
Устройство работает следующим образом.
Световой пучок от лазера 1 формируется коллимирующей оптической системой 2, проходит оптический компенсатор 11 и попадает на нерасстраиваемый огветвитель 3-4, после чего часть светового пучка проходит, а часть, отражаясь от грани пентапризмы 3, отклоняется под углом 90е к исходному направлению распространения светового пучка, т.е. направлению распространения светового пучка, прошедшего через пентапризму 3 с клином 4, которое явяляется референтным. Отклоненный пентапризмой 3 световой пучок попадает на светоделительную грань кубпризмы 5, где происходит, в свою очередь, его деление на две ч-асти. Прошедшая часть светового пучка (пучок А)направляется на nrfa- вающее зеркало 7 и, отразившись от него, снова попадает на светодели- тельную грань кубпризмы 5, которая отражает его на фокусирующий элемент 8.Отраженная от светоделительной грани кубпризма 5 другая часть светового пучка (пучок В) попадает на нерасстраиваемый двухгранный отражатель 6 и отразившись от него, также попадает на фокусирующий элемент 8, . который фокусирует прошедший (пучок А) и отраженный (пучок В) световые пучки в своей фокальной плоскости, совмещенной с плоскостью анализа позиционно-чувствительното фотодатчика 9.Размеры и положение нерасст- раиваемого отражателя 6 выбраны таки образом, чтобы отраженный (пучок В) от него световой пучок диафраги- ровался светоделительной кубпризмой 5. Далее в позиционно-чувствительном фотодатчике 9 происходит преобразование светового потока в электрический сигнал.
В том случае, когда референтный световой пучок параллелен отражающей поверхности плавающего) зеркала, фокусирующий элемент 8 собирает оба световых пучка (прошедший пучок А и отраженный пучок В) в плоскости анализа в одну точку. В этом случае расстояние между сфокусированными точками световых пучков А и В в плоскости анализа равно нулю, т.е. направление распространения референтного светового пучка горизонтально. В том случае, когда в плоскости анализа образуются две точки, референтное направление не горизонтально при этом расстояние между ними пропорционально угловому отклонению референтного светового пучка, по отношению к горизонтальному направлению, задаваемому отражающей поверхностью плавающего зеркала 7.
Электрический сигнал с позици- онно-чувствительного фотодатчика 9, в качестве которого может быть использован, например , линейный ПЗС- фотодатчик, поступает в блок управления 10, одновременно на пороговое устройство 12 и пиковый детектор 13. В пороговом устройстве 12, состоящем в простейшем случае, например, из двух компараторов с уровнями срабатывания, различающимися между собой в два раза, осуществляется формирование сигнала разрешения счета счетчика 14 и сигнала знака рассйгласова ния,устанавливающего триггер знака 15.На второй опорный вход порогового устройства 12 поступает сигнал с пикового детектора 13. с помощью которого происходит автоматическая подстройка порогов срабатывания компараторов при изменении выходной мощности лазера 1. В результате обеспечивается высокая точность измерений расстояния между световыми пя%тнами независимо от колебаний мощности источника излучения 1 . С помощью схемы синхронизации 16 обеспечивается попеременный .а§жим работы порогового устройст0
5
0
5
0
5
0
5
0
5
tва 12 и пикового детектора 13, а также синхронизация работы остальных узлов блока 10. В первом такте рабо- i ты осуществляется измерение амплитуды сигнала с выхода фотодатчика 9 и запоминание этой величины до конца второго такта в пиковом детекторе 13. В начале такта осуществляется сброс сигнала пикового детектора 13. В первом такте может также осуществляться отработка рассогласования приводом оптического компенсатора 17. величина которого перед этим была, например, измерена. Во втором такте работы блока управления 10 пороговое устройство 12 вырабатывает импульсы управления счетчиком 14 и триггером 15, а пиковый детектор находится в режиме хранения.Синхронизация работы блокг. 16 с работой фото-атчн- ка 9 может осуществляться импульсами конца строки ПЗС 9, а импульсы счета, соответствующие расстоянию между пятнами на поверхности фотодатчика 9, могут также подаваться со схемы управления ПЗС, например, с вывода соответствующего тактовым сигналам ПЗС-элементь: строки. В начале такта измерения схема управления 16 обеспечивает сброс счетчика 14 и триггера 15 п исходное состояние.В пороговом устройстве I2 с помощью двух компараторов с разными порогами осуществляется формирование импульса рассогласования лучей. В устройстве световь.е пучки А и В различаются между собой по интенсивности приблизительно в два раза (интенсивность светового пучка В больше интенсивности пучка А). Следовательно, если с выхода фотодатчнка 9 первым поступает,например,сигнал от светового пучка В, то на выходе порогового устройства 12 формируется импульс установки триггера 15, в противном случае этот импульс не формируется. Импульс знака запоминается трип-ером знака 15 и совместно с кодом величины расстояния между пятнами поступает на схему управления приводом 17 оптического компенсатора 11 может быть выполнен, например, на основе шагового двигателя с соответствующими схемами управления. Код рассогласования с учетом знака, поступивший на привод компенсатора 17, приводит к изменению углового положения исходного сйетового
пучка так, чтобы пятна на поверхности фотодатчика 9 совпали. В этом случае референтный световой пучок нивелира примет горизонтальное направление.
При сборке данного устройства не требуется специальных мер для точной юстировки оптических элементов. На точность горизонтирования не сказывается также нестабильность взаимного положения элементов в конструкции. Погрешность в изготовлении отдельных оптических элементов определяет постоянную систематическую ошибку горизонтирования, которая может быть учтена или скомпенсирована, например, наклоном отражающей поверхности плавающего зеркала 7 по отношению к .поверхности жидкости. Систематическую погрешность, вносимую непараллельностыс граней склеенной пентапризмы 3 с клином 4, можно всегда учесть или скомпенсировать оптическим компенсатором 11.
Таким образом, устройство является автоматическим в режиме ориентирования и способно автоматически компенсировать нестабильность направления излучения лазера, при этом на точность задания референтного направления не влияют деформации устройства и разъюстировка оптических элементов.
Формула изобретения
Лазерный нивелир, содержащий лазер и коллимирующую систему, последовательно установленные на опти10
15
15784728
ческой оси, искусственный горизонт, установленный над ним первый светоделитель, в рабочей плоскости которого расположена оптическая ось, фокусирующий элемент с фокальной плоскостью, фотоэлектрический датчик, оптически сопряженный с искусственным горизонтом через первый светоделитель, и блок управления с входом и выходом, отличающийся тем, что, с целью повышения точности за счет уменьшения влияний разъюстировки, в него введены второй светоделитель, установленный на оптической оси после колли- мирующей системы над первым светоделителем и оптически сопряженный с лазером и искусственным горизонтом, световозвращатель с разнесенными входным и выходным окнами, установленный напротив первого светоделителя, с противоположной стороны по отношению к фотоэлектрическому датчику и оптически сопряженный с ним, и оптический компенсатор с приводом, установленный на оптической оси между коллимируюшей системой и вторым светоделителем,причем фокусирую- щий элемент расположен между первым светоделителем и фотоэлектрическим датчиком, расположенным в фокальной плоскости фокусирующего элемента, входное окно световозвращателя обращено к первому светоделителю, а выходное окно к фокусирующему элементу, вход блока управления электрически соединен с выходом фотоэлектрического датчика, а выход - с приводом оптического компенсатора.
20
25
30
35
40
Ч
S/
Фиг l
| Фотоэлектрический лазерный нивелир | 1985 |
|
SU1357716A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| Зацарапанный А.В | |||
| Автоматизация высокоточных инженерно-геодезических измерений | |||
| - М.: Недра, 1976, с.187, рис.123. | |||
