Изобретение относится к устройствам для очистки решет и может быть использовано в химической, горнорудной промышленности, сельском хозяйстве.
Целью изобретения является повышение эффективности процесса очистки роторных решет с многоугольным профилем поперечного сечения.
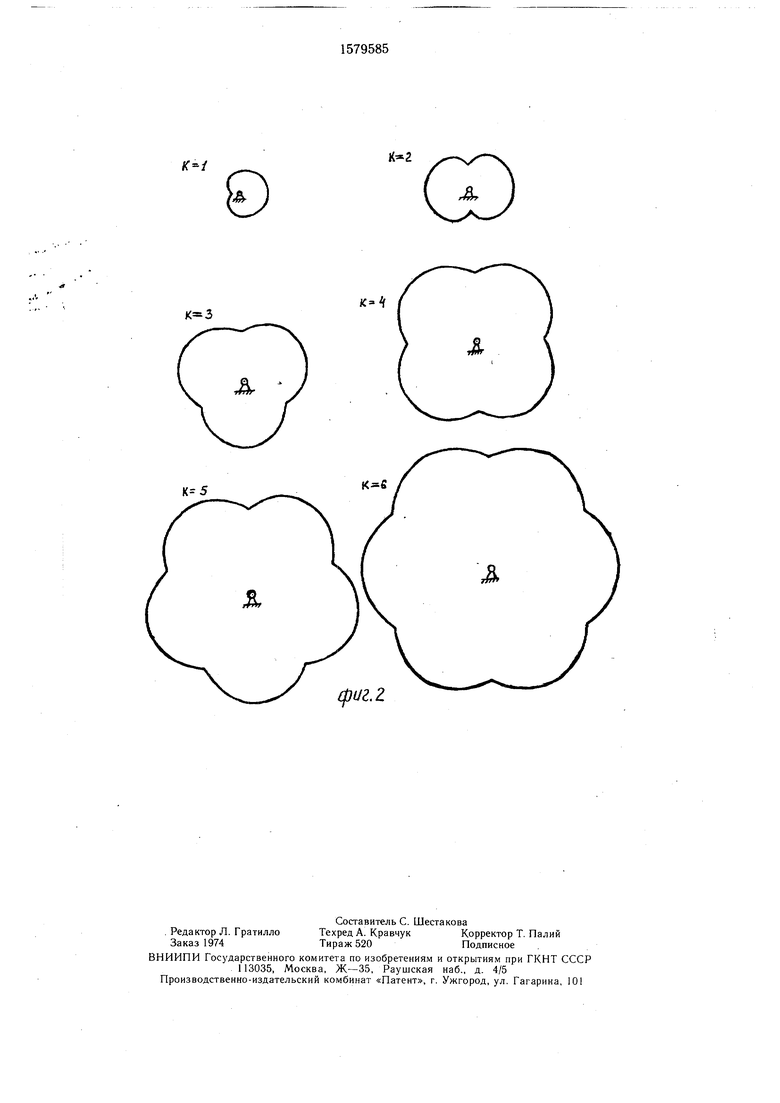
На фиг. 1 изображена конструктивная схема предложенного очистителя; на фиг. 2 - профили поперечного сечения ротора для
шестиугольного ротора при г, ,2,...,6.
Очиститель содержит цилиндрический ролик 1, установленный на оси 2 и прижатый к решету 3. Профиль поперечного сечения ролика 1 выполнен из одинаковых участков 4 и 5 в виде выпуклых кривых,
полярные координаты р и ф каждой из которых описываются уравнением
9 f±|/rt(l|JL(V(P.)i|);
, , i-ь,(i)
,1
где -b2, b-lcosjf, t- параметр;
r - радиус описанной окружности ротора;
е - расстояние между осями ролика и решета, выполненное равным
п- число сторон многоугольного сечения ротора;
k - число криволинейных участков ролика, причем Ј определяется из зависимости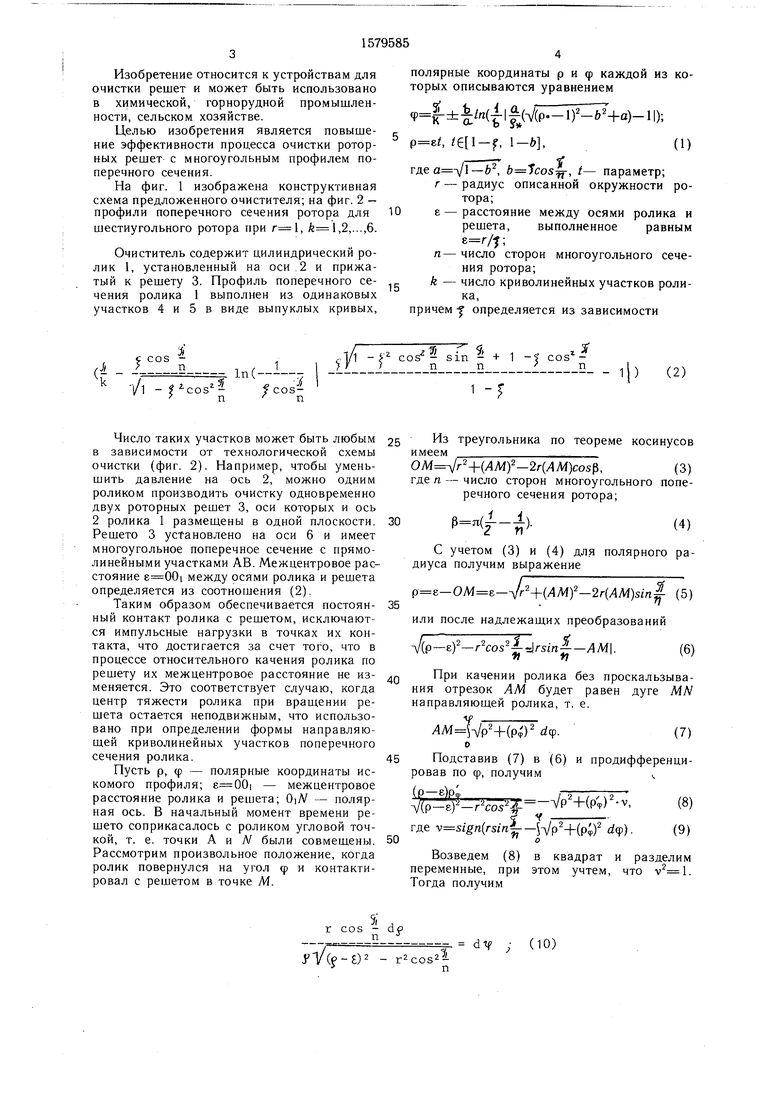
| название | год | авторы | номер документа |
|---|---|---|---|
| Очиститель решет | 1986 |
|
SU1318310A1 |
| РАБОЧИЙ ОРГАН ВИНТОВОЙ РОТОРНОЙ МАШИНЫ | 2013 |
|
RU2534657C1 |
| ЦИКЛОИДАЛЬНО-ЭВОЛЬВЕНТНОЕ ЗУБЧАТОЕ ЗАЦЕПЛЕНИЕ | 1993 |
|
RU2113643C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРИВОЛИНЕЙНОГО ПРОФИЛЯ ЛОПАСТЕЙ ДИСКОВ | 2011 |
|
RU2530928C2 |
| РОТОРНО-ВРАЩАТЕЛЬНАЯ МАШИНА | 1993 |
|
RU2062907C1 |
| Устройство для непрерывного формования изделий из твердеющего пластичного материала | 1988 |
|
SU1680508A1 |
| РОТОРНО-ВРАЩАТЕЛЬНАЯ МАШИНА | 1996 |
|
RU2113622C1 |
| Рабочее оборудование роторного экскаватора | 1986 |
|
SU1435678A1 |
| Ролик для ротационного выдавливания | 1985 |
|
SU1310048A1 |
| Циклоидное зубчатое зацепление | 1990 |
|
SU1772470A1 |
Изобретение относится к химической, горнорудной промышленности и сельскому хозяйству и предназначено для очистки решет (Р). Цель - повышение эффективности процесса очистки роторных Р с многоугольным профилем поперечного сечения. Для этого профиль поперечного сечения установленного с возможностью взаимодействия с внешней поверхностью взаимодействия с внешней поверхностью Р 3 ролика 1 выполнен из участков 4, 5 в виде выпуклых кривых. Полярные координаты P и @ каждой из кривых описываются параметрическими уравнениями @ , где A =(1-B 2) 1/2
B=COS @
T - параметр
R - радиус описанной окружности ротора
N - число сторон многоугольного сечения ротора
K - число криволинейных участков сечения ротора
@ - межосевое расстояние ролика 1 и Р 3, выполненное равным @ . Причем @ определяется по тригонометрической зависимости. За счет этого обеспечивается постоянный контакт ролика 1 с Р 3, исключаются импульсные нагрузки в точках их контакта за счет того, что в процесс относительного качения ролика 1 по Р 3 их межцентровое расстояние не изменяется. При этом исключается пропуск неочищенных участков Р 3. 2 ил.
Число таких участков может быть любым в зависимости от технологической схемы очистки (фиг. 2). Например, чтобы уменьшить давление на ось 2, можно одним роликом производить очистку одновременно двух роторных решет 3, оси которых и ось 2 ролика 1 размещены в одной плоскости. Решето 3 установлено на оси 6 и имеет многоугольное поперечное сечение с прямолинейными участками АВ. Межцентровое расстояние между осями ролика и решета определяется из соотношения (2).
Таким образом обеспечивается постоянный контакт ролика с решетом, исключаются импульсные нагрузки в точках их контакта, что достигается за счет того, что в процессе относительного качения ролика по решету их межцентровое расстояние не изменяется. Это соответствует случаю, когда центр тяжести ролика при вращении решета остается неподвижным, что использовано при определении формы направляющей криволинейных участков поперечного сечения ролика.
Пусть р, ф - полярные координаты искомого профиля; - межцентровое расстояние ролика и решета; Q}N - полярная ось. В начальный момент времени решето соприкасалось с роликом угловой точкой, т. е. точки А и N были совмещены. Рассмотрим произвольное положение, когда ролик повернулся на угол ф и контактировал с решетом в точке М.
г cos - dp n J
V(e-s)2 - 1|) (2)
Из треугольника по теореме косинусов
имеем
)2-2г(/Ш)со5р,(3)
где п - число сторон многоугольного поперечного сечения ротора;
30
(f-Ј).
(4)
С учетом (3) и (4) для полярного радиуса получим выражение
p z-OM Ј-jr2+(AM)2-2r(AM) (5) или после надлежащих преобразований -J(p-E)2-r2cos23- rsin2-AM.(6)
При качении ролика без проскальзывания отрезок AM будет равен дуге MN
направляющей ролика, т. е. (РФ )2 dq.
(7)
Подставив (7) в (6) и продифференцировав по ф, получим,.
(р-е)р«
IP-вдо„/ 2 i / / Ч2
-3(р-$-г соа Ј -чр +W v
(8)
где (rsxn| jVp2+(pi)2 ф).(9)
о
Возведем (8) в квадрат и разделим переменные, при этом учтем, что . Тогда получим
dtp
(10)
r2cos2i n
+ Јг- r2cos2-) - 2б| P + сПусть k - число участков профиля поперечного сечения ролика очистителя (чертеж соответствует случаю ).
Тогда угловой период каждого участка равен
ф.--, , 2, 3, ....
К
Для определения постоянной интегрирования удобно применить условия
Ф при р е-rcos -.
После определения с: из (11) можно получить зависимость вида (ф). Однако она значительно усложняется в сравнении с полученной (11) в виде (р), поэтому изменять форму записи искомой функции не имеет смысла. Следует лишь учесть, что в силу симметрии профиля она оказывается двухзначной
ф,ф(р,); (р,)
Из (11) с учетом (12)-(14) и получим (1). Кроме того, число участков очистителя необходимо выдержать целым. Этого можно достичь соответствующим подбором межцентрового расстояния е, для чего необходимо применить дополнительное условие, например
/ - - при .(15)
С использованием (15) получим дополнительное уравнение (2) для определения е.
Таким образом, если из (2) определить межцентровое расстояние е, а затем по уравнению (1) постоить профили участков поперечного сечения ролика, то при вращении решета центр тяжести ролика будет оставаться неподвижным и будет обеспечен постоянный контакт ролика с решетом. Это устраняет основные причины низкой эффективности работы очистителя, исключаются пропуски неочищенных участков решета, отсутствует интенсивное динамическое взаимодействие ролика с решетом при перекатывании через угловые точки ротора.
Устройство работает следующим образом.
При вращении решета 3 ролик 1 перекатывается по его поверхности и в точках
f COS 1п( I
1 -t cos -f cos nn
$
;i|- r2cos22)|Cf-O2 r2cos2- + n
(11)
15
контакта вытесняет застрявшие в отвер- 10 стиях частицы внутрь решета 3. Форма участков 4 и 5 сечения ролика 1 обеспечивает постоянный контакт ролика с решетом 3, а также неизменность межосевого расстояния . Таким образом, в процессе работы очистителя центр тяжести ролика 1 остается неподвижным и его ускорение равно нулю. Следовательно, равны нулю и силы инерции как произведение массы на ускорение. В этих условиях взаимодействие ролика 1 с решетом 3 обус-, 20 ловлено только силой их прижатия, которая выбирается достаточной для расклинивания застрявших частиц. Это исключает движение ролика 1 по решету 3 с нарушением контакта и пропуском неочищенных участков. Исключаются также удары ролика по 25 решету и интенсивное их динамическое взаимодействие.
Формула изобретения
30
35
Очиститель отверстий роторных решет, включающий цилиндрический ролик, установленный с возможностью взаимодействия с внешней поверхностью решета, отличающийся тем, что, с целью повышения процесса очистки отверстий роторных решет с многоугольным профилем поперечного сечения, профиль поперечного сечения ролика выполнен из участков в виде выпуклых кривых, полярные координаты р и у каждой из которых описываются параметрическими уравнениями
Ф 1+|/„(1||У(,1))-П); , ), -Ь,
45
I7
где 1-Ь fe fcos-
50
-ff-t t - параметр; г - радиус описанной окружности ротора;п- число сторон многоугольного сечения
ротора;
k - число криволинейных участков сечения ротора;
е - межосевое расстояние ролика и решета, выполненное равным , причем j определяется из зависимости
sin - + 1 -f cos-nf
1
n
-y
z
n
(риг. г
K-2
| Очиститель решет | 1986 |
|
SU1318310A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Очиститель отверстий барабанных грохотов | 1973 |
|
SU487681A1 |
