1
(21)4337851/27-11
(22)04.12.87
(46) 23.07.90. Бюл. № 27 (75) E. Б. Иссерлин
(53)621.336.2(088.8)
(56)Патент ФРГ № 3136559, кл. В 60 L 5/36, 1983.
(54)УСТРОЙСТВО ДЛЯ ЭЛЕКТРОСНАБЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА
(57)Изобретение относится к электрода - жению безрельсовых транспортных среде га, питаемых от внешней электросети. Цель
изобретения - упрощение устройства. Поставленная цель достигается выполнением следящего механизма, пропорционального регулированию скорости движения контактной тележки. Механизм управления электроприводом содержит два блока слежения в виде двух самоподматывающихся бараба- ИОР 10 со связью с экипажем либо судном л контакной тележкой в виде троса 9. Бара См.;ы 10 разнесены по длине тележки 1 и связаны через дифференциальный механизм 11 с электроприводом 4 ил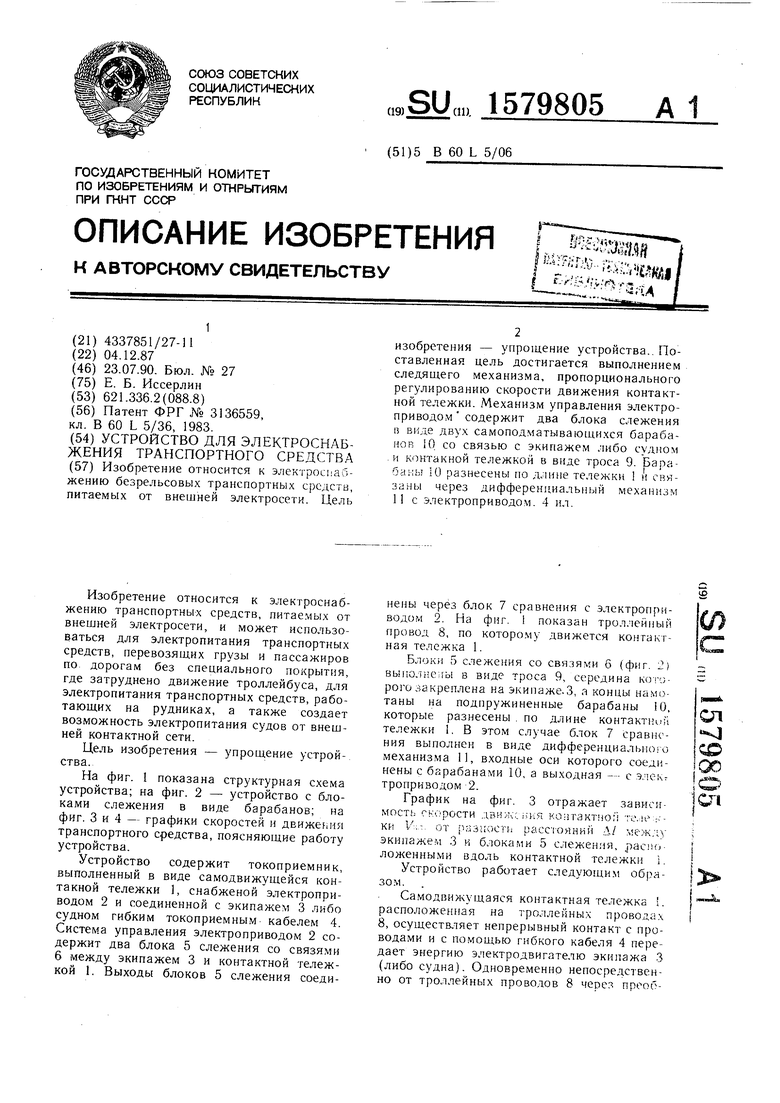
| название | год | авторы | номер документа |
|---|---|---|---|
| Токоприемник для безрельсового электрического транспорта | 1937 |
|
SU55000A1 |
| СПОСОБ ПИТАНИЯ ЭЛЕКТРИЧЕСКИХ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2297928C1 |
| ПОЖАРОВЗРЫВОЗАЩИЩЕННОЕ ТОКОСЪЕМНОЕ УСТРОЙСТВО ТРОЛЛЕЙНОЙ СИСТЕМЫ ЭЛЕКТРОПИТАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2533375C2 |
| РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС БОЕВОЙ МАШИНЫ | 2000 |
|
RU2272753C2 |
| БАШЕННЫЙ КРАН | 1990 |
|
RU2006449C1 |
| ИНСПЕКЦИОННО-ДОСМОТРОВЫЙ КОМПЛЕКС | 2018 |
|
RU2731683C2 |
| Кабельно-троллейный токоподвод транспортных подвижных средств | 1989 |
|
SU1758746A1 |
| СПОСОБ ПИТАНИЯ ЭЛЕКТРОТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2136515C1 |
| ПОДСИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ ХОЛОДИЛЬНОЙ КАМЕРЫ ИЛИ ОХЛАЖДАЕМОГО ПРОСТРАНСТВА, СПОСОБ ПРЕДОТВРАЩЕНИЯ ПОТЕРИ СКОРОСТИ КОМПРЕССОРА ТРАНСПОРТНОЙ ХОЛОДИЛЬНОЙ УСТАНОВКИ И ПОДСИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ КОМПРЕССОРА ТРАНСПОРТНОЙ ХОЛОДИЛЬНОЙ УСТАНОВКИ | 2007 |
|
RU2431090C2 |
| Устройство для подвода электроэнергии к подвижному объекту | 1987 |
|
SU1544697A1 |
Изобретение относится к электроснабжению безрельсовых транспортных средств, питаемых от внешней электросети. Цель изобретения - упрощение устройства. Поставленная цель достигается выполнением следящего механизма, пропорционального регулированию скорости движения контактной тележки. Механизм управления электроприводом содержит два блока слежения в виде двух самоподматывающихся барабанов 10 со связью с экипажем либо судном и контактной тележкой в виде троса 9. Барабаны 10 разнесены по длине тележки 1 и связаны через дифференциальный механизм 11 с электроприводом. 4 ил.
Изобретение относится к электроснабжению транспортных средств, питаемых от внешней электросети, и может использоваться для электропитания транспортных средств, перевозящих грузы и пассажиров по дорогам без специального покрытия, где затруднено движение троллейбуса, для электропитания транспортных средств, работающих на рудниках, а также создает возможность электропитания судов от внешней контактной сети.
Цель изобретения - упрощение устройства.
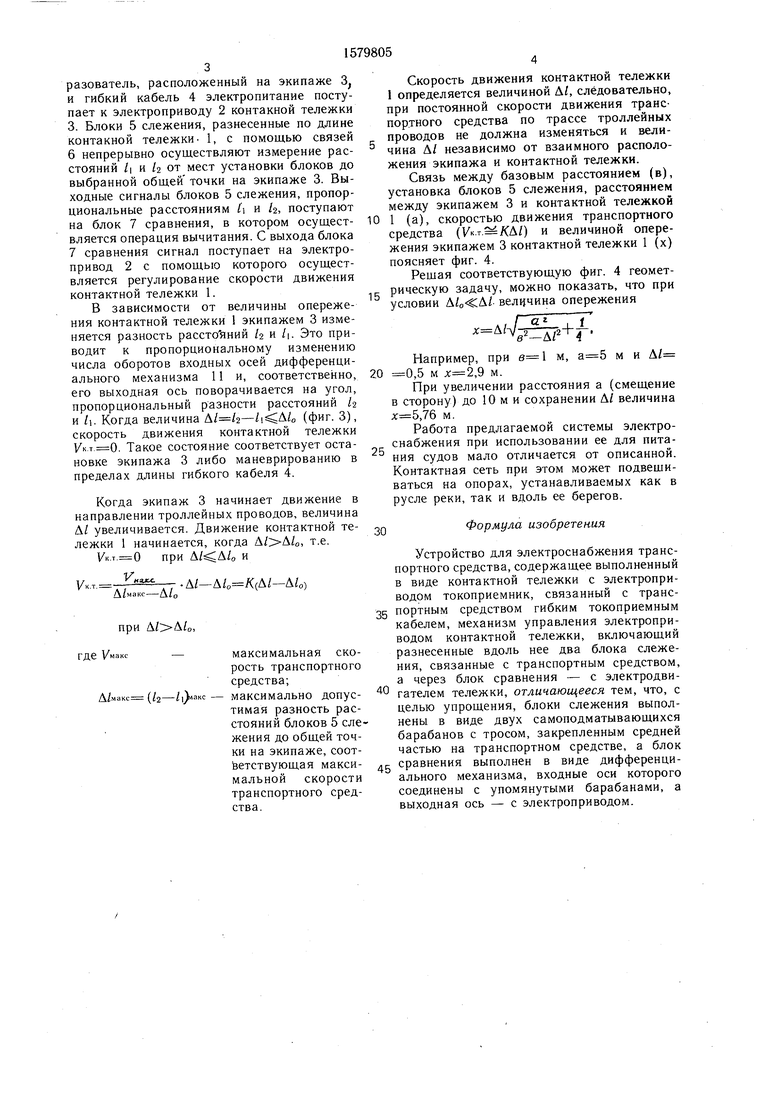
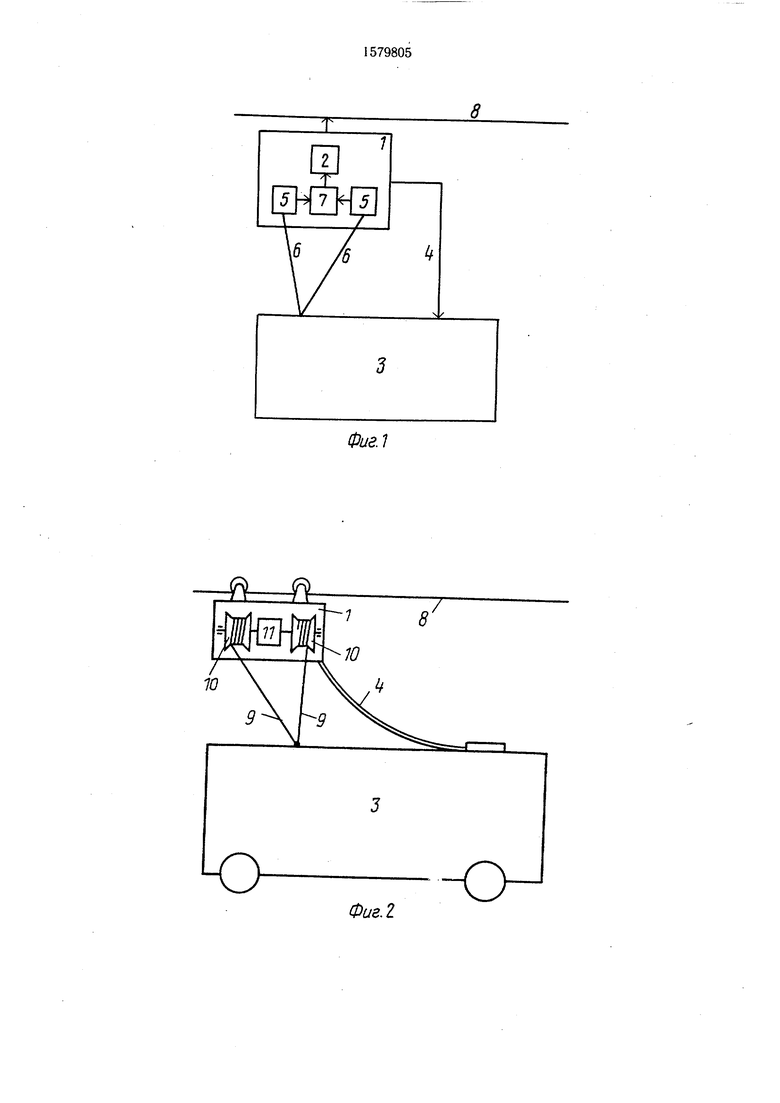
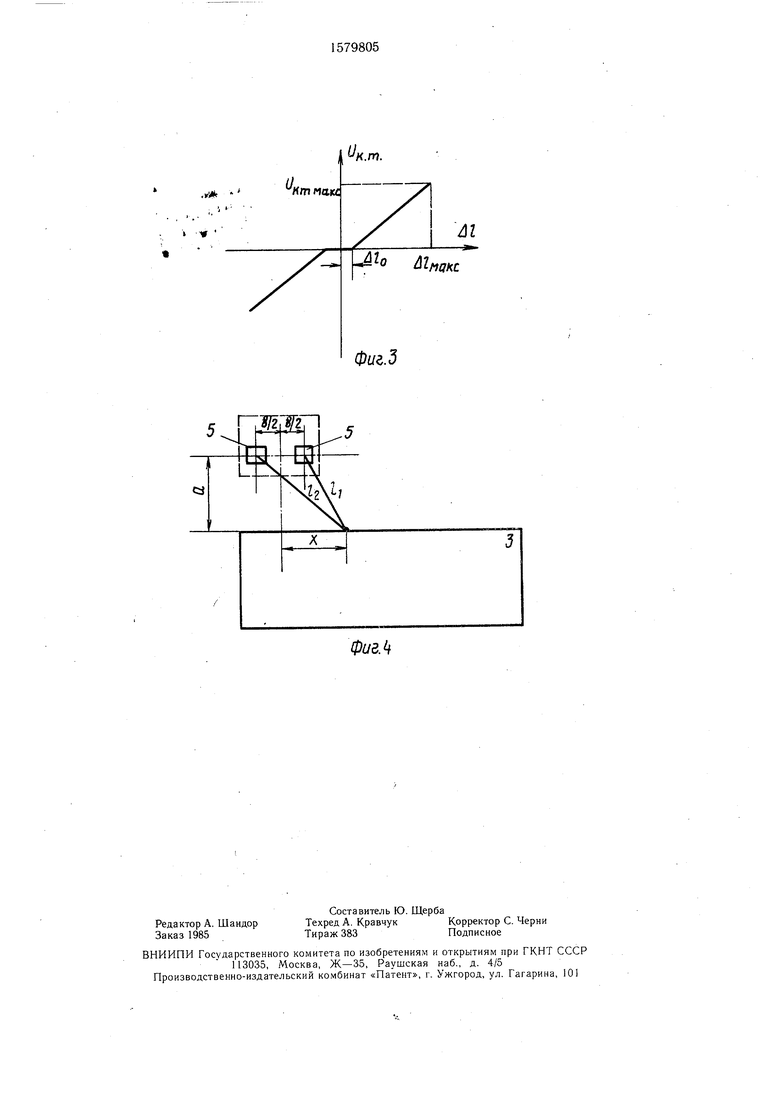
На фиг. 1 показана структурная схема устройства; на фиг. 2 - устройство с блоками слежения в виде барабанов; на фиг. 3 и 4 - графики скоростей и движения транспортного средства, поясняющие работу устройства.
Устройство содержит токоприемник, выполненный в виде самодвижущейся контакной тележки 1, снабженой электроприводом 2 и соединенной с экипажем 3 либо судном гибким токоприемным кабелем 4. Система управления электроприводом 2 содержит два блока 5 слежения со связями 6 между экипажем 3 и контактной тележкой 1. Выходы блоков 5 слежения соединены через блок 7 сравнения с электроприводом 2 На фиг 1 показан троллейный провод 8, по котором} движется кон га кi- ная тележка 1.
Блоки 5 слежения со связями 6 (фиг J) выполис1Ы в виде троса 9, середина ко. ; рого закреплена на экипаже.З, а концы нам о таны на подпружиненные барабаны 10, которые разнесены по длине контактной тележки 1. В этом блок 7 сравнения выполнен в виде дифференциально о механизма II, входные оси которого соединены с барабанами 10, а выходная - с э троприводом 2.
График на фиг 3 отражает завион
MOCTL рОСТИ VR Ч ,1,ч 40 ШакТНОП V 0 КР V о Г p:.Id.I.;CUi раОСЮЯНИЙ 1 ч С Ч-. ,v
экипажем 3 и блоками 5 слежения, распо ложенными вдоль контактной тележки 1
Устройство работает следующим образом.
Самодвижущаяся контактная тележка . расположенная на троллейных проводах 8, осуществляет непрерывный контакт с проводами и с помощью гибкого кабеля 4 передает энергию электродвигателю экипажа 3 (либо судна). Одновременно непосредственно от троллейных проводов 8 через преооСП
00
о сд
Л
разователь, расположенный на экипаже 3, и гибкий кабель 4 электропитание поступает к электроприводу 2 контакной тележки 3. Блоки 5 слежения, разнесенные по длине контакной тележки. 1, с помощью связей
6непрерывно осуществляют измерение расстояний /| и /2 от мест установки блоков до выбранной общей точки на экипаже 3. Выходные сигналы блоков 5 слежения, пропорциональные расстояниям t и /2, поступают на блок 7 сравнения, в котором осуществляется операция вычитания. С выхода блока
7сравнения сигнал поступает на электропривод 2 с помощью которого осуществляется регулирование скорости движения контактной тележки 1.
В зависимости от величины опережения контактной тележки 1 экипажем 3 изменяется разность расстояний /2 и 1. Это приводит к пропорциональному изменению числа оборотов входных осей дифференциального механизма 11 и, соответственно, его выходная ось поворачивается на угол, пропорциональный разности расстояний /2 и /ь Когда величина (фиг. 3), скорость движения контактной тележки . Такое состояние соответствует остановке экипажа 3 либо маневрированию в пределах длины гибкого кабеля 4.
Когда экипаж 3 начинает движение в направлении троллейных проводов, величина А/ увеличивается. Движение контактной тележки 1 начинается, когда , т.е.
у«.т.0 при и
Скорость движения контактной тележки 1 определяется величиной А/, следовательно, при постоянной скорости движения транспортного средства по трассе троллейных проводов не должна изменяться и вели- чина А/ независимо от взаимного расположения экипажа и контактной тележки.
Связь между базовым расстоянием (в), установка блоков 5 слежения, расстоянием между экипажем 3 и контактной тележкой 10 1 (а), скоростью движения транспортного средства (Ук.т./(Д/) и величиной опережения экипажем 3 контактной тележки 1 (х) поясняет фиг. 4.
Решая соответствующую фиг. 4 геометрическую задачу, можно показать, что при условии величина опережения
.
20
25
30
Например, при м, м и Д/ 0,5 м ,9 м.
При увеличении расстояния а (смещение в сторону) до 10 м и сохранении А/ величина ,76 м.
Работа предлагаемой системы электроснабжения при использовании ее для питания судов мало отличается от описанной. Контактная сеть при этом может подвешиваться на опорах, устанавливаемых как в русле реки, так и вдоль ее берегов.
Формула изобретения
Ук.т.
V
к
Д/максД/0
М-М0 К(М-М0)
при ,
где Умакс-максимальная скорость транспортного средства;
Д/макс (1ч - /i ianc- МЗКСИМалЬНО ДОПуСтимая разность расстояний блоков 5 слежения до общей точки на экипаже, соотУстройство для электроснабжения транспортного средства, содержащее выполненный в виде контактной тележки с электроприводом токоприемник, связанный с транс- 35 портным средством гибким токоприемным кабелем, механизм управления электроприводом контактной тележки, включающий разнесенные вдоль нее два блока слежения, связанные с транспортным средством, а через блок сравнения - с электродвигателем тележки, отличающееся тем, что, с целью упрощения, блоки слежения выполнены в виде двух самоподматывающихся барабанов с тросом, закрепленным средней частью на транспортном средстве, а блок ветствующая макси- 45 сравнения выполнен в виде дифференци- мальной скоростиального механизма, входные оси которого
транспортного сред-соединены с упомянутыми барабанами, а
ства.выходная ось - с электроприводом.
40
Скорость движения контактной тележки 1 определяется величиной А/, следовательно, при постоянной скорости движения транспортного средства по трассе троллейных проводов не должна изменяться и вели- чина А/ независимо от взаимного расположения экипажа и контактной тележки.
Связь между базовым расстоянием (в), установка блоков 5 слежения, расстоянием между экипажем 3 и контактной тележкой 1 (а), скоростью движения транспортного средства (Ук.т./(Д/) и величиной опережения экипажем 3 контактной тележки 1 (х) поясняет фиг. 4.
Решая соответствующую фиг. 4 геометрическую задачу, можно показать, что при условии величина опережения
.
Например, при м, м и Д/ 0,5 м ,9 м.
При увеличении расстояния а (смещение в сторону) до 10 м и сохранении А/ величина ,76 м.
Работа предлагаемой системы электроснабжения при использовании ее для питания судов мало отличается от описанной. Контактная сеть при этом может подвешиваться на опорах, устанавливаемых как в русле реки, так и вдоль ее берегов.
Формула изобретения
б /
а
k
Фиг. Z
.
и,
Km ма«
4f
ПЖЖП
Al
PZ° Я/икс
Фиг.З
.
